

法兰类工件搬运机械手臂设计(含CAD零件图装配图)
法兰类工件搬运机械手臂设计(含CAD零件图装配图)(论文说明书12000字,CAD图9张) 摘 要 本设计为法兰类工件搬运机械手臂设计,本文通过设定已有参数,在多个方案的对比下进行设计一款搬运单臂的机械臂的设计。机械手的手爪是夹持手爪,根据设计方案绘制零件图...

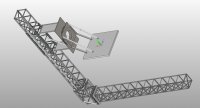
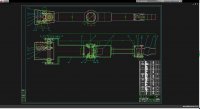
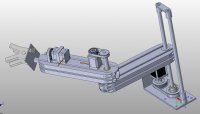
带机械手的起重机结构设计(含CAD图)
带机械手的起重机结构设计(含CAD图)(设计说明书15000字,CAD图7张) 摘要:本文以带机械手的起重机为研究对象,系统阐述其结构设计方法与理论依据。通过整合起重机性能分析、机械手功能集成及《机械设计手册》规范要求,完成起升机构、运行机构及主梁的优化设...

三自由度机械手腕(5公斤负载)的设计(含CAD图)
三自由度机械手腕(5公斤负载)的设计(含CAD图)(任务书,开题报告,论文说明书10000字,CAD图5张) 摘 要 现在的制造业,由于规模较大,企业为了提高生产效率,保证产品质量,机械手成为了生产线上不可或缺的重要成员,慢慢地被广大企业所接受和认可。近几年由于工...

铸件搬运机械手结构及液压控制系统设计(含CAD零件图装配图)
铸件搬运机械手结构及液压控制系统设计(含CAD零件图装配图)(论文说明书9000字,CAD图纸7张) 作业对象的搬运范围为半径为1m的扇形区域。同时搬运的方向为上下方向,高度变化范围为1.2m。且机械手设计寿命为15年。下面对机械手总方案进行分析: (1)机械手的最...

平移式机械手控制系统设计(含CAD图)
平移式机械手控制系统设计(含CAD图)(任务书,开题报告,外文翻译,文献摘要,论文说明书16000字,CAD图2张) 摘 要 随着现代工业技术的发展,机械手在现代工业中的应用越来越广泛,它可以代替人在复杂危险的环境中工作。而这些机械手中以二自由度机械手应用最为广...

三自由度机械臂系统设计及控制(圆柱坐标式机械手,10Kg)(含CAD图)
机器手臂是一种自动化机械装置,能够接收指令,精确地定位到三维或二维上的某一点进行作业,得到广泛的实际应用。机械臂同时也是机械手执行机构的重要部分,能够引导手指准确地抓住工件并运送到所需位置。...
简易升降机械手设计及三维建模(含CAD图,SolidWorks三维图)
简易升降机械手设计及三维建模(含CAD图,SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书14700字,CAD图3张,SolidWorks三维图) 摘要 本文利用三维建模软件SOLIDWORKS和有限元分析软件ANSYS设计并校验了所设计的新型桥梁检测车。虽然传统的桥梁检测车也...

三自由度机械手臂机械及控制系统设计(5kg负载)(含CAD零件装配图)
三自由度机械手臂机械及控制系统设计(5kg负载)(含CAD零件装配图)(任务书,开题报告,论文说明书15600字,CAD图6张) 摘要 随着机电一体化技术在各个工业邻域的广泛应用,机械设备的自动控制成分显得尤为重要,由于各种各样工作的不同需要,作业人员们常常经受在...
三自由度机械手臂机械及控制系统设计(含CAD零件图装配图)
三自由度机械手臂机械及控制系统设计(含CAD零件图装配图)(任务书,开题报告,外文翻译,论文说明书18000字,CAD图3张) 摘要 在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,机械手作为自动化生产线上的重要成员,逐渐...
棉花采集机械手的设计(含CAD零件图装配图,SolidWorks三维图)
棉花采集机械手的设计(含CAD零件图装配图,SolidWorks三维图)(开题报告,论文说明书9000字,CAD图8张,SolidWorks三维图) 摘要 棉花作为重要的纺织原料,是全球范围内重要的经济作物之一。棉花的种植区域较为广泛,主要的集中区在亚洲大陆南部、美国南部、拉丁美...