
铸件搬运机械手结构及液压控制系统设计(含CAD零件图装配图)

资料介绍:
铸件搬运机械手结构及液压控制系统设计(含CAD零件图装配图)(论文说明书9000字,CAD图纸7张)
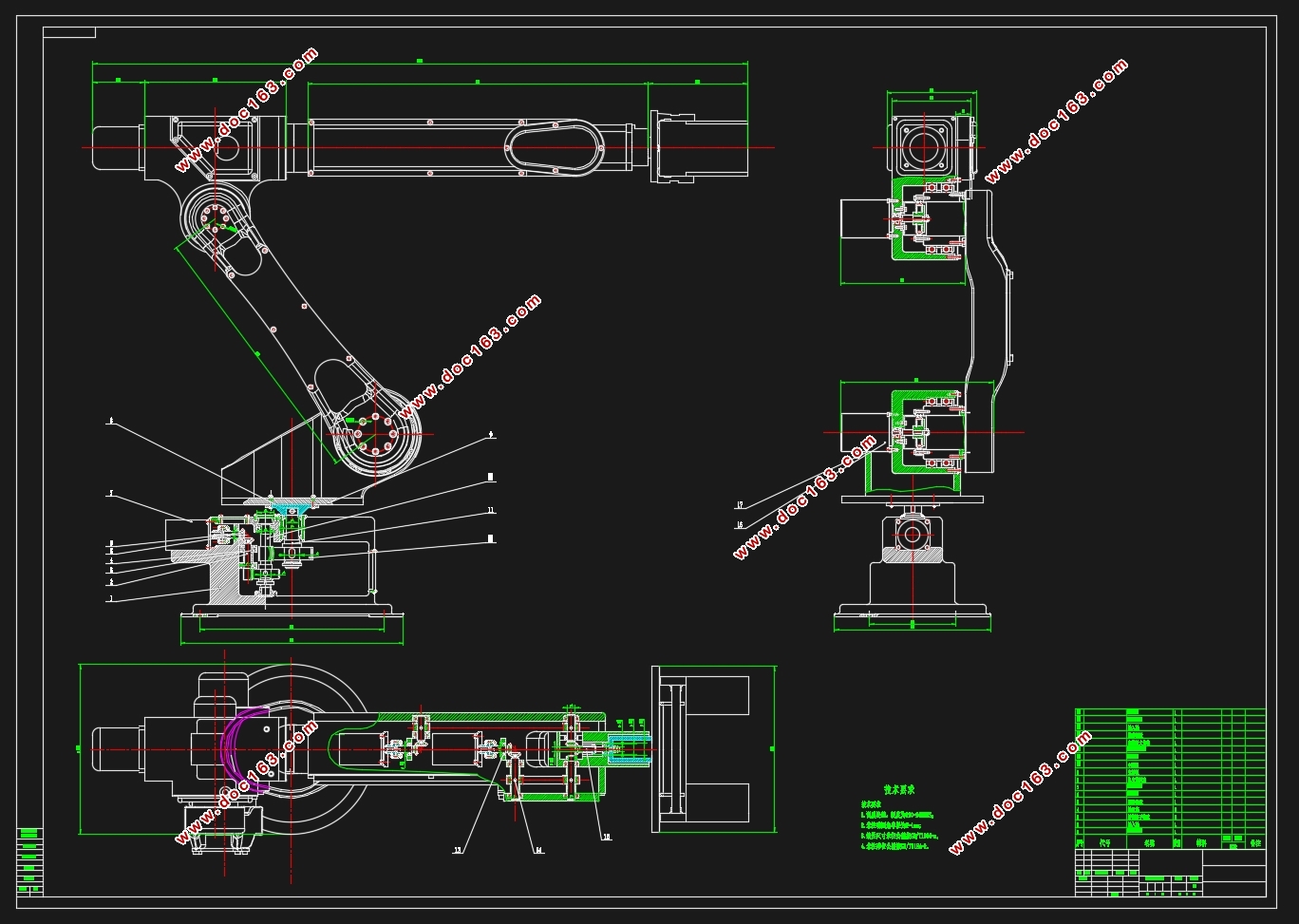
作业对象的搬运范围为半径为1m的扇形区域。同时搬运的方向为上下方向,高度变化范围为1.2m。且机械手设计寿命为15年。下面对机械手总方案进行分析:
(1)机械手的最大抓重是其规格的主参数,本设计抓取的铸件为缸体裙架,缸体裙架重量为3.88kg,所以本文设计抓取的质量为4Kg。
(2)机械手的基本参数运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。而影响机械手动作快慢的主要因素是手臂伸缩及回转的速度。最大回转角设计为0-360度。油缸伸缩速度根据油缸流量变化,这里可以先设定平均升降速度为67mm/s、平均伸缩速度为83mm/s。机械手动作时有启动、停止过程的加、减速度存在,用速度一行程曲线来说明速度特性较为全面,因为平均速度与行程有关,故用平均速度表示速度的快慢更为符合速度特性。除了运动速度以外,手臂设计的基本参数还有伸缩行程和工作半径。根据任务书要求,该铸件为一件扁平长方体,根据长方体的重心分析,该机械手手臂的伸缩行程需要超过零部件长度的一般,这里暂定为300mm,最大工作半径约为1000mm。手臂升降行程定为1200mm。
[资料来源:http://www.doc163.com]
机械手通过手指的展开,将工件从宽度方向夹起,完成铸件的搬运。
[资料来源:www.doc163.com]

目录
摘 要 I
Abstract II
一、绪论 1
1.1 引言 1
1.2国内外研究现状 1
1.2.1 国外的研究现状 1
1.2.2 国内的研究现状 1
[来源:http://Doc163.com]
1.3本文研究的主要内容 2
二、总体方案设计 3
2.1、总方案论述 3
2.2.1 驱动系统 3
2.2.2 传动系统 3
2.2 结构与传动原理 4
2.3 总体方案设计 4
三 搬运机械手大臂的结构设计 6
3.1 机构设计 6
3.2 驱动系统选型 6
3.3 承载能力计算 7
3.3.1 柔轮齿面的接触强度的计算 7
3.3.2 柔轮疲劳强度的计算 7
3.3.3 轴的计算校核 8
四、搬运机械手末端结构设计 11
4.1 结构设计与校核 11
4.2 计算分析 18
4.3 传动轴的设计 19
五、机身结构的设计 22
5.1 齿轮设计 22
5.2 轴的设计 25
5.3 轴承校核 32
六 机械手液压系统计算 37
[资料来源:www.doc163.com]
6.1 双作用单杆活塞油缸 37
6.2 无杆活塞油缸 40
总结 41
致谢 42
参考文献 43
[资料来源:http://Doc163.com]
上一篇:10t四连杆门座起重机设计及运行机构设计(含CAD图,CREO三维图)