
法兰类工件搬运机械手臂设计(含CAD零件图装配图)

法兰类工件搬运机械手臂设计(含CAD零件图装配图)(论文说明书12000字,CAD图9张)
摘 要
本设计为法兰类工件搬运机械手臂设计,本文通过设定已有参数,在多个方案的对比下进行设计一款搬运单臂的机械臂的设计。机械手的手爪是夹持手爪,根据设计方案绘制零件图和装配图。本次设计是对手臂的机械结构进行设计,计算出手部所受驱动力,选择合适的腕部驱动电机。并且设计出臂部驱动方案,针对机器人的大臂电机与小臂电机进行合理的选型,对机器人的手部、腕部、小臂、大臂通过计算进行校核,计算出弯矩、扭矩并画出弯矩扭矩图。大力发展搬运机械是有很大的前景的。机械臂的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和搬运;其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。因而,受到很多国家的重视,投入大量的人力物力来研究和应用。尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。
关键词:搬运,机械臂,设计
Design of Four Degree of Freedom Method Workpiece Robot Arm
Abstract
This design is for a flange type workpiece handling robotic arm. By setting existing parameters and comparing multiple solutions, this article designs a single arm mechanical arm for handling workpieces. The gripper of the robotic arm is used to hold the gripper, and part and assembly drawings are drawn according to the design scheme. This design involves designing the mechanical structure of the arm, calculating the driving force acting on the hand, and selecting a suitable wrist drive motor. And design an arm drive scheme, select the appropriate motor for the robot's upper arm and lower arm, verify the robot's hand, wrist, lower arm, and upper arm through calculation, calculate the bending moment and torque, and draw a bending moment and torque diagram. The vigorous development of handling machinery has great prospects. The development of robotic arms is due to its increasingly recognized positive role: firstly, it can partially replace manual operation; Secondly, it can complete the transportation and handling of workpieces according to the requirements of the production process, following certain procedures, time, and location; Thirdly, it can operate necessary machinery for welding and assembly, greatly improving the working conditions of workers, significantly increasing labor productivity, and accelerating the pace of industrial production mechanization and automation. Therefore, it has received attention from many countries and invested a lot of manpower and material resources in research and application. Especially in situations with high temperature, high pressure, dust, noise, and radiation and pollution, it is more widely used. [来源:http://Doc163.com]
Keywords:Handling, Manipulator, Design
本文研究的主要内容
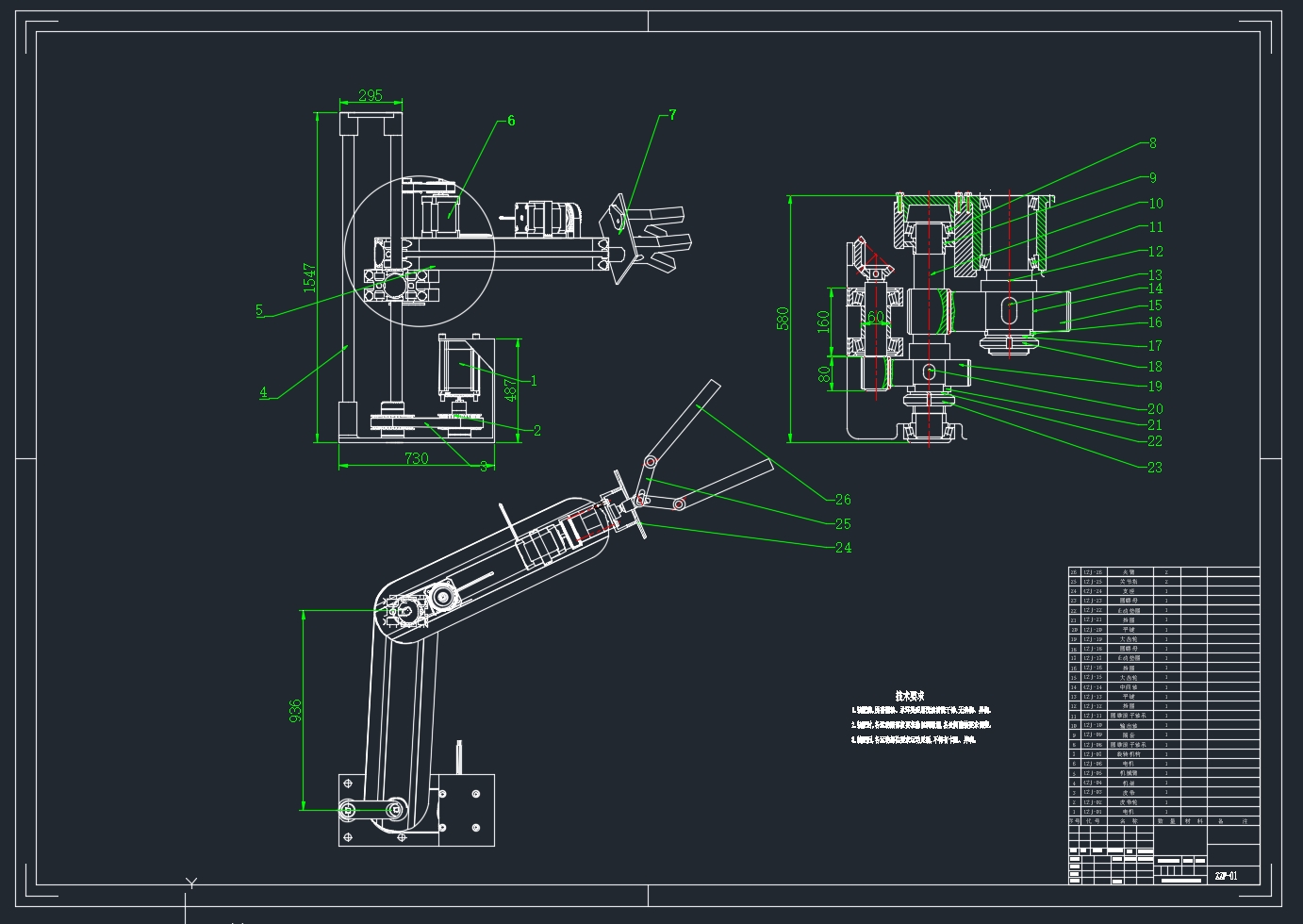
本文主要针对法兰类工件的搬运机械臂做详细的设计与计算,搬运机械臂的主要设计内容主要包括大臂的自由度设计、机械臂末端的抓取结构和受力分析,还有传动系统、机械系统的结构设计。本文主要写了对机械臂的总体设计方案、机械臂大臂的结构设计、机械臂末端结构的结构设计、传动轴和齿轮的设计。
2 总体方案设计
2.1 数据参考
本题目将设计法兰类工件搬运机械臂。
设计参数如下:
1)自由度:4 自由度
2)安装方式:落地式
3)坐标型式:关节坐标型
4)腕部电机转速:3000r/min
5)手腕回转:±270°
6)基座回转:±270°
[资料来源:www.doc163.com]

目录
1 绪论 1
1.1 引言 1
1.2 国内外研究现状 2
1.2.1 国外的研究现状 2
1.2.2 国内的研究现状 2
1.3 本文研究的主要内容 3
2 总体方案设计 4 [来源:http://www.doc163.com]
2.1 数据参考 4
2.2 总方案论述 4
2.3 结构与传动原理 4
2.4 总体方案设计 5
3 搬运机械臂大臂的结构设计 7
3.1 设计基本要求 7
3.2 驱动系统选型 7
3.3 关键零部件计算校核 8
3.3.1柔轮齿面的接触强度的计算 8
3.3.2柔轮疲劳强度的计算 9
3.3.3轴的计算校核 10
3.3.4 减速器的选型 11
4 搬运机械臂末端结构设计 17
4.1 结构设计与校核 17
4.2 计算分析 24
4.3 传动轴的设计 25
5 机身结构的设计 28
5.1 齿轮设计 28
5.2 轴的设计 32
5.3 轴承校核 40
6 法兰类工件搬运机械手臂的经济分析与社会环保评价 44
6.1 经济分析 44
6.2 社会环保评价 44
结论 46
致谢 47
参考文献 48 [版权所有:http://DOC163.com]