
三自由度机械手臂机械及控制系统设计(含CAD零件图装配图)
三自由度机械手臂机械及控制系统设计(含CAD零件图装配图)(任务书,开题报告,外文翻译,论文说明书18000字,CAD图3张)
摘要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,机械手作为自动化生产线上的重要成员,逐渐被企业所认同并采用。机械手的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,机械手主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
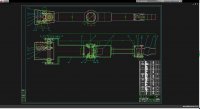
本文将设计一台三关节机器人手臂机构,是模仿人的手臂设计的,这种机器人有肩、肘、腕三个关节自由度,有大臂、小臂两根连杆以及一个机械手组成。臂杆部分是开式连杆系,臂杆主要用于对物体的抓取、搬运、放置工作。首先,本文将设计机器人的底座、大臂、的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的动力传输系统,控制系统,包括电机的选择、数据采集卡和驱动器的选择、端子板电路的设计以及控制软件的设计,重点加强传动部分的可靠性和机器人运行过程的安全性,最终实现的目标包括:腰部的旋转运动,大臂的俯仰运动,大臂移动副的伸缩运动,能够应用于焊接与装配作业。 [资料来源:http://doc163.com]
关键词:机械手 自由度 伺服 大臂 小臂
Abstract
In today's mass manufacturing, enterprise for improve the production efficiency, and ensure product quality, universal attention production process automation degree, manipulator as an important member of automatic production line, gradually recognized by the enterprise and using. The technical level and application manipulator degree to a certain extent, reflected a national industrial automation level, at present, the main bearing robot welding, painting, handling and storage, etc and the intensity of labor greatly repetitive work, work normally take the reappearance of the demonstration teaching way.
In this paper I will design a three degrees of freedom is the function of the manipulator, mainly is automatic handling. First, this article will design the robot base, arm, wrist and the structure of the manipulator, and then choose the appropriate transmission mode, driving way, build the robot structure platform; On this basis, this paper will design the robot's power transmission system, including motor choice,choosing DAQ card, drivers and designing electric circuit of the terminal card and control software. strengthening the reliability of the transmission part the safety of operation process and robot, including: the final goal of the waist of the rotary motion, arm and arm pitch motion vice telescopic movement, move can be used for bearing and assembly operations. [资料来源:Doc163.com]
Keywords: manipulator;freedom;servocontrol;big arm;forearm
[来源:http://Doc163.com]



目录
摘要 I
Abstract I
目录 I
第一章 绪论 1
1.1选题背景及意义 1
1.2机器人简介 1
1.3国内外研究现状及发展趋势 2
1.4工业机械手在生产中的应用 4
第二章 机械手臂的设计方案 6
2.1机械手的坐标型式与自由度 6
2.1.1机械手的坐标形式 6
2.1.2 机械手的自由度 8
2.2 移动机器人机械臂的总体设计 9
2.2.1 机械臂结构的确定 9
2.2.2 臂长的确定 9
2.2.3 机械臂设计的主要参数 10
2.3驱动方式 10
2.4 制动器 11
2.5 机器人常用的传动机构形式 12
第三章 机器人运动控制 22
3.1 机器人控制的特点 22
3.2机器人控制的分类 23 [来源:http://www.doc163.com]
3.3 机器人控制系统 25
第四章 控制系统硬件 27
4.1 控制系统模式的选择 27
4.2 控制系统的搭建 27
4.2.1工控机 28
4.2.2运动控制器 29
4.2.3 驱动器 31
4.2.4嵌入式运动控制器端子板 32
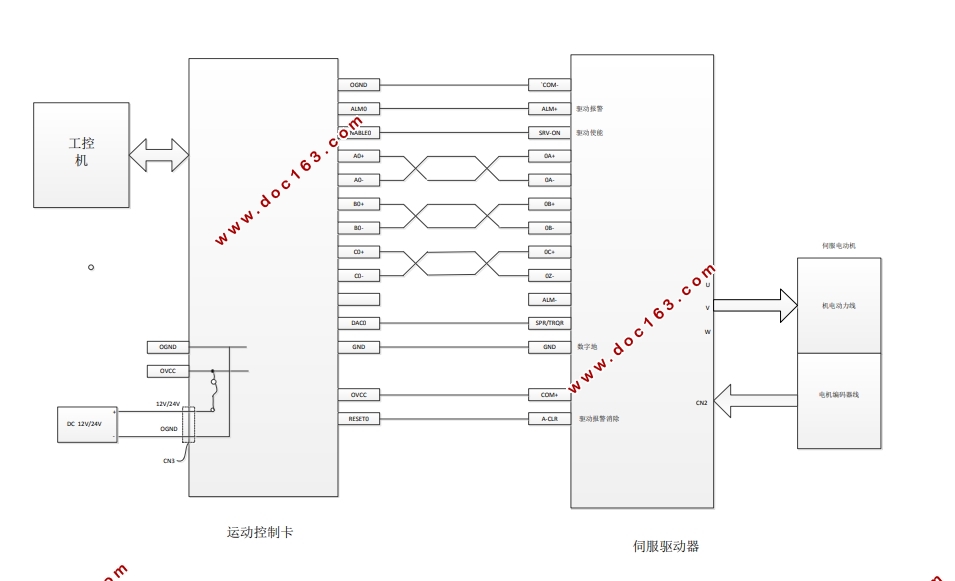
4.3 控制器与计算机、驱动器及电机的连接 33
4.3.1 控制器与计算机的连接 33
4.3.2 控制器与驱动器连接 33
4.3.3 驱动器与电机连接 36
第五章 控制系统软件 37
5.1 预想的功能 37
5.2 实现方式 37
5.2.1 直流电机的伺服驱动 38
5.2.2 电机的自锁 38
5.3 软件设计 39
总结 41
参考文献 42
致谢 43 [资料来源:http://www.doc163.com]
上一篇:新型洗浴器设计(含CAD图)
下一篇:CWGS200型擦窗机羊角臂结构三维设计(含PROE三维图)