
城市微型电动皮卡的越障联动机构设计(含CAD图,CATIA三维图)

城市微型电动皮卡的越障联动机构设计(含CAD图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书15000字,CAD图6张,CATIA三维图)
摘要
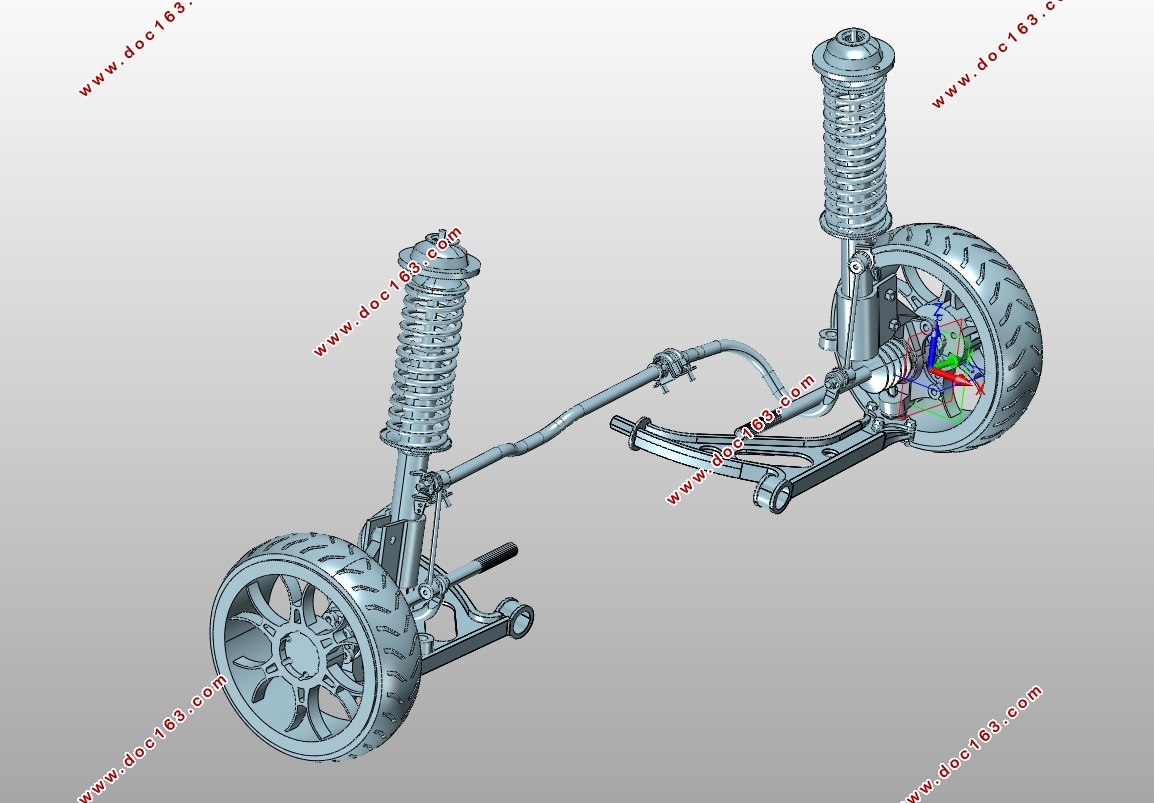
作为更加柔性贴合于大众的日常生活,既能够体现轿车的舒适度,又在动力方面优于普通轿车的皮卡车,在纯电动的发展潮流中焕发新的活力。城市电动皮卡作为一种新型的城市通勤车,在满足操作稳定性和舒适性以及安全性的要求的前提下,也要拥有一定的越障能力。从市面成熟的乘用车结构来看,悬架系统承担了绝大部分的性能要求,越障能力也在悬架上有所体现,因此本次对于皮卡车的越障联动机构的设计重心放在前悬挂系统上进行设计。从成本、车型以及技术等问题考虑,选择设计麦弗逊前独立悬架系统。
在进行麦弗逊式悬挂系统的设计时,首先确定了整车的各项基本参数,进行悬架几何参数的选择与布置,然后进行主要零件的设计,包括通过载荷弹簧的几何尺寸、通过阻尼力和最大卸荷力确定减振器的主要尺寸,以及,选择设计摆臂的外型和布置方式。用Catia软件进行零件三维建模,对悬架系统进行装配形成悬架模型,然后用Adams进行运动仿真分析和参数优化。
关键词:麦弗逊悬架;结构设计;三维建模;运动仿真。
Abstract
[来源:http://Doc163.com]
As a daily life that is more flexible and fits into the public, it can not only reflect the comfort of a car, but also be superior to a pickup truck of an ordinary car in terms of dynamics, and is radiating a new vitality in the development trend of pure electric vehicles. Urban electric pickups, as a new type of urban commuter car, must also have certain obstacle avoidance capabilities under the premise of satisfying operational stability, comfort and safety requirements. Judging from the mature passenger car structure in the market, the suspension system has assumed most of the performance requirements, and the obstacle-surpassing capability is also reflected in the suspension. Therefore, the design of the obstacle-response linkage mechanism for the pickup truck is focused. Design on the front suspension system. From the perspective of cost, model, and technology, the McPherson independent suspension system was designed.
In the design of the McPherson suspension system, the basic parameters of the vehicle were first determined, and then the suspension parameters were selected and arranged through the basic parameters, such as the design of the sprung mass, stiffness, and dynamic and static deflection. Calculations. The design of the main part is then carried out, including the determination of the main dimensions of the damper by the geometry of the load spring, the damping force and the maximum unloading force, and the choice of the design and configuration of the swing arm. Using Catia software to carry out three-dimensional modeling of parts, the suspension system is assembled to form a suspension model, and then Adams is used for motion simulation analysis and parameter optimization.
Key Words: McPherson suspension; structural design; 3D modeling; motion simulation.
悬架的布置方案
所设计的悬架机构所对应的车型为城市微型纯电动皮卡车,借鉴于市场已经有成熟的微型电动车,如smart以及东风风神E30等车型进行设计。从设计成本、设计时间、悬挂系统工作环境等因素综合考虑,微型纯电动皮卡车的前悬采用麦弗逊悬挂系统。选定悬架类型之后即对相关零部件进行设计,最后进行仿真模拟。
表2-1 总布置参数
外形尺寸mm 2695*1663*1665
整车整备质量kg 920kg
总质量kg 1170
轴距mm 1873
前轮规格 165/60 R15
后轮规格 185/60 R15
最小离地间隙mm 140
空载轴荷分配kg 460 460
满载轴荷分配kg 550 620
前桥左右悬架总质量 kg
80
最大功率PS 17
最大马力kw 23
最大扭矩N.m 64 [资料来源:https://www.doc163.com]
[来源:http://Doc163.com]



 [资料来源:http://Doc163.com]
[资料来源:http://Doc163.com] 
目 录
第一章 绪论 1
1.1 课题来源、目的、意义 1
1.2 国内外研究现况及发展趋势 1
1.3设计目标 2
1.4麦弗逊悬架介绍 2
1.4.1悬架的功用 2
1.4.2悬架的组成 3
第二章 悬架总体布置方案及参数计算 6
2.1 悬架的布置方案 6
2.2麦弗逊悬架的结构分析 7
2.3 悬架性能参数的计算 7
2.3.1 悬架的刚度 8
2.3.2悬架的静挠度 8
2.3.3 悬架的动挠度 10
2.3.4 悬架的工作行程 10
2.3.5 悬架的弹性特性 11
2.4车轮定位参数 11
2.4.1 主销后倾角 12
2.4.2 主销内倾角 13
2.4.3 前轮外倾角 13
2.4.4 前轮前束 14
2.4.5本章小结 15
第三章 悬架弹性元件的设计 16
3.1 弹簧形式、材料的选取 16
3.2 螺旋弹簧的受力及变形 16
3.2.1 弹簧的受力 16
3.2.2 螺旋弹簧的刚度 17
3.3 弹簧几何参数的计算 17
3.3.1弹簧材料的性能 17
3.3.2 弹簧的旋绕比C 18
3.3.4 簧丝直径d和弹簧中径D 18
3.3.5 弹簧圈数 18 [资料来源:https://www.doc163.com]
3.4本章小结 20
第四章 减振器的设计 21
4.1减振器主要性能参数的选取 21
4.1.1相对阻尼系数的选择 21
4.1.2 减振器阻尼系数δ的确定 22
4.1.3 最大卸荷力的确定 22
4.2 主要尺寸参数的设计 23
4.3 本章小结 24
第五章 悬架导向机构的设计 25
5.1前轮导向机构的设计要求 25
5.2导向结构受力分析 25
5.3 导向机构的布置参数 26
5.3.1 侧倾中心的高度 26
5.3.2纵倾中心 27
第六章 仿真与分析 29
6.1 主销后倾角的仿真结果 30
6.2 前轮外倾角的仿真结果 31
6.3 前轮前束角的仿真结果 32
6.4 主销内倾角的仿真结果 33
第七章 结论与展望 36
7.1 结论 36
[资料来源:http://doc163.com]
7.2 展望 37
参考文献 38
致谢 40
上一篇:小型轿车轻量化过程中的座椅系统设计(含CAD图,CATIA三维图)
下一篇:城市微型纯电动皮卡车架有限元分析及结构优化(含CAD图,CATIA三维图)