
履带式救援机器人设计及三维建模设计(含SolidWorks三维图)
履带式救援机器人设计及三维建模设计(含SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书14500字,SolidWorks三维图)
摘要
近些年来,世界各地发生了诸多的自然与人为灾害,而在灾害发生之后如何及时的解救被困人员就成为了世界各国研究的一个重要项目。但是由于灾难现场复杂环境以及随时可能发生的二次灾害,极有可能威胁救援人员的生命安全。所以为了在事故现场复杂环境下及时获得内部信息并且保证救援人员安全的情况下,设计了一种具有越障功能的前后双履带式救援探测机器人。
本文主要从3个方面展开研究设计:
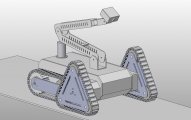
(1)通过对救援现场复杂环境的分析并研究了救援机器人翻越障碍的步进姿态后,设计了一种具有越障功能的前后双履带式救援机器人模型,并对救援机器人进行了环境与经济性分析。
(2)分析救援机器人重心变化理论并利用solidworks软件对设计的救援机器人进行了三维模型的搭建,为之后的仿真分析建立了可靠的三维模型。
(3)将三维模型导入到3dsmax软件中赋予材质使机器人更具有真实性,并利用3dsmax制作救援机器人越障动画,对救援机器人越障仿真动画结果进行讨论分析。
所得结论可为履带式救援机器人结构的设计优化提供一定的帮助,对救援机器人的越障能力以及复杂环境下的适应能力分析具有一定的参考价值。
关键词:前后双履带式机器人;虚拟样机;仿真动画
Abstract
In recent years, there have been many natural and man-made disasters in various parts of the world, and how to rescue the trapped people after the disaster has become an important project in the world. But because of the complex environment at the scene of the disaster and the possible occurrence of secondary disasters, is likely to threaten the lives of rescue workers. Therefore, in order to get the internal information in the complex environment of the accident scene and ensure the safety of the rescue personnel, a kind of front and rear double-track rescue detection robot with obstacle function is designed.
This article mainly from three aspects of research design:
(1) Based on the analysis of the complex environment of the rescue site and the step-by-step attitude of the rescue robot, the paper designs a kind of front and rear double-track rescue robot model with the barrier function, and has carried on the environment and economy to the rescue robot Sexual analysis. [版权所有:http://DOC163.com]
(2) Analyze the theory of the center of gravity of the rescue robot and build the 3D model of the rescue robot by using the solidworks software, and establish a reliable three-dimensional model for the subsequent simulation analysis.
(3) the three-dimensional model into the 3ds max software to give the material to make the robot more authenticity, and the use of 3ds max production rescue robot obstacle animation, rescue robots obstacle simulation results discussed and analyzed.
The conclusion can provide some help for the optimization of the design of the crawler rescue robot structure, which has certain reference value for the rescue capability of the rescue robot and the adaptability of the complex environment.
Key words:Front and rear double track robots; Virtual prototyping; Simulation anima
[资料来源:http://doc163.com]




 [版权所有:http://DOC163.com]
[版权所有:http://DOC163.com] 

目录
第1章绪论 1
1.1课题的背景意义 1
1.2国内外研究现状 1
1.3论文研究的内容 3
第2章救援机器人设计方案 4
2.1 救援机器人的结构设计 4
2.4 救援机器人越障进程分析 6
2.5 救援机器人重心变化理论分析 7
2.6 经济性与环保性分析 9
2.7本章小结 9
第3章机器人三维建模 11 [资料来源:http://www.doc163.com]
3.1 软件选择 11
3.2 机身部分 11
3.3 履带部分 12
3.3.1 前履带运动部件 12
3.3.2 后履带运动部件 14
3.3.3 履带部分 14
3.4 机械臂部分 16
3.5 内部传动部分 17
3.5 各部分装配过程 18
3.6 本章小结 19
第4章救援机器人动画仿真 20
4.1 软件的选用以及模型导入 20
4.2 材质贴图 21
4.3 动画制作准备工作 22
4.4 制作动画 23
4.4 本章小结 27
第5章结论与展望 28
5.1 结论 28
5.2 展望 28
参考文献 30
致谢 31 [资料来源:http://Doc163.com]
上一篇:40万吨/年硫酸转化工段热管省煤器的设计(含CAD零件图装配图)
下一篇:1500t/h抓斗卸船机海、陆侧上横梁设计(含CAD图,SolidWorks三维图)