
300X72型自动化物料仓库行走机构及升降机构设计(含ProE三维图)
300X72型自动化物料仓库行走机构及升降机构设计(含ProE三维图)(任务书,开题报告,外文翻译,论文说明书18600字,ProE三维图)
摘 要
自动化立体仓库也称自动存取系统,它是一种用高层立体货架(托盘系统)存储物资,用自动控制堆垛机进行存取作业,用计算机控制管理的仓库。自动化立体仓库除了具有传统仓库的基本功能外,还具有分拣、理货的功能,以及在不直接进行人工处理的情况下,自动存储和取出物料的功能。
近年来,随着企业生产与管理的不断提高,越来越多的企业认识到物流系统的改善与合理性对企业的发展非常重要。堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格;或者相反取出货格内的货物运送到巷道口。
本文详细论述了在现代大多数企业中普遍使用的堆垛机的设计方案,文章的重点放在其两个部件:升降机构、行走机构的设计上,并对安全机构和控制部分进行简单的选取和计算其中包含电机,减速器的选取,齿轮,齿条的计算,轴的校核,电器原理图的配置等。首先,提出各个机构的总体设计方案;其次,对各个机构的受力情况进行了分析并计算,然后估算初取值,再进行校核,最后确定各个实际值。 [版权所有:http://DOC163.com]
关键词:自动化立体仓库 堆垛机
300X72 AS&RS Design and Three Dimensional Modelling
——Walking Mechanism &Elevator Mechanism Design
Abstract
Automated warehouse, also known as automatic access system, which is a kind of high-level three-dimensional shelf (pallet system) storage materials, stacker with automatic control for access to the operating, using a computer controlled warehouse management. Automated warehouse in addition to the basic functions of a traditional warehouse, also has sorting, tallying function, and does not directly deal with the case of manual, automatic storage and removal of material functions.
In recent years, with the production and management continues to improve, more and more companies recognize the logistics system improvement and rational development of enterprises is very important. Stacker is the most important automated warehouse stacking lifting equipment, it can in the tunnel of automation cube in the shuttle operation of round trip, will locate in tunnel the goods of mouth stock goods shelf; or opposite take out the goods transit in goods shelf go to tunnel mouth.
This paper describes the majority of enterprises in the widespread use of modern stacking machine design, the article focused on its two components: lifting mechanism and security agencies and the control part simple selection and calculation including motor, reducer selection, gear, rack of calculation, the calculation of roll, axis calibration, electrical schematic diagram of the configuration. First, the proposed design programs of various agencies; Secondly, the force of the various agencies to conduct the analysis and calculation, and then estimate the initial value, and then checked, and finally establish the actual value.
Key word:AS/RS ; stacker
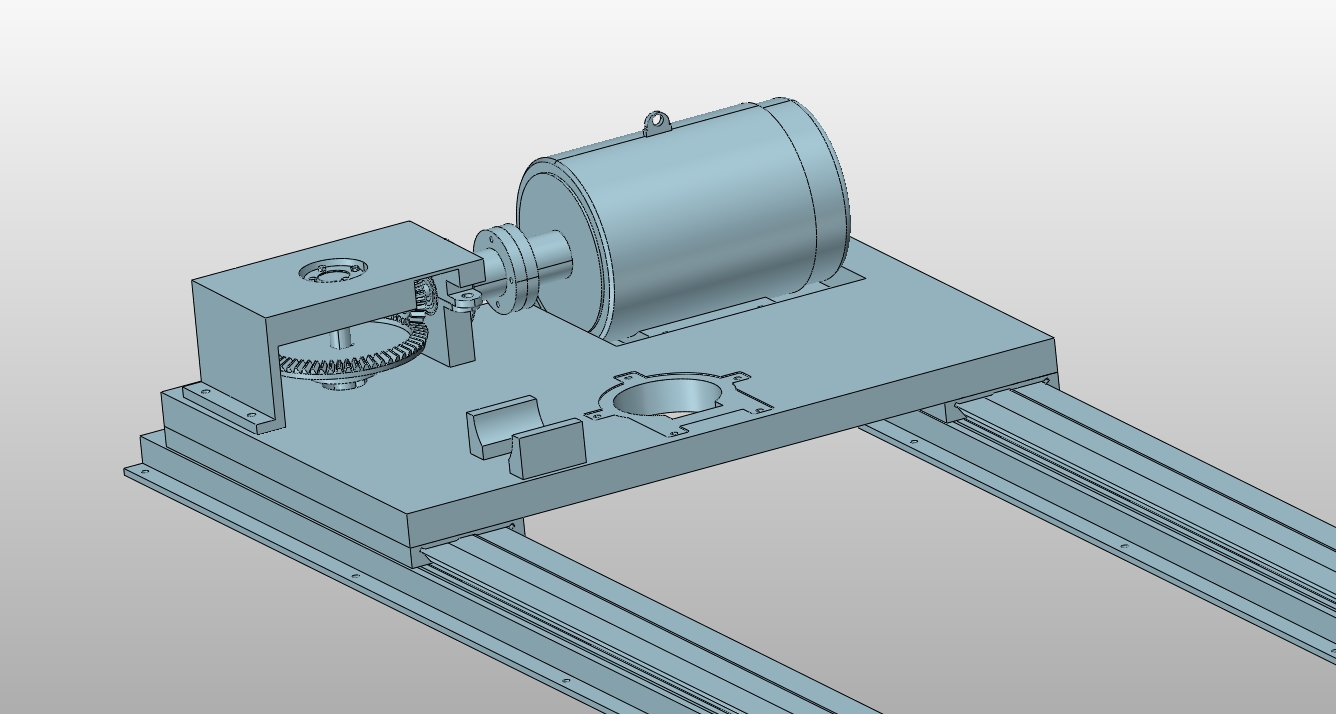
行走机构设计
行走机构的作用是实现X方向自由度。可用齿轮齿条实现,但需要先经一对锥齿轮改变运动和动力的输出方向。根据初始数据取水平运动阻力F约为F=2500N,再由水平运动速度v=0.5m/s,推得该部分传动的输入功率P=FV/η=1.5KW。 [来源:http://Doc163.com]
3.1主要零件设计
3.1.1齿轮齿条及圆柱齿轮的设计
由原始参数知,水平阻力F=2500N,水平速度V=0.5m/s , =0.833。 因此,该部分传动的输出功率为P=F×V/ =1.5kw。
取小齿轮的模数m=2,取其齿数 =22,得
=m× =2×22=44
V= = =217r/min
= ×i=217×3=651r/min(锥齿轮传动比为3)
由 和 查表 选取三相异步电动机Y132S-8( =2.2kw, =710r/min)


[版权所有:http://DOC163.com]

目录
摘 要 I
Abstract II
第一章 引 言 1
1.1自动化立体仓库的概述 1
1.1.1自动化立体仓库系统的基本构成 2
1.1.2自动化立体仓库发展的趋势及展望 2
1.2 设计的目的和意义 3
1.3设计的内容及要求 4
第二章 自动化物料仓库的总体设计 5
2.1货架 5
2.2堆垛机 5
2.2.1水平方向的运动 6
2.2.2垂直方向的运动 6
2.2.3存取货物方向的运动 7
2.2.4货叉伸缩机构绕Z轴的旋转运动 7
2.3堆垛机的技术参数 7
2.4堆垛机的技术要求 9
第三章 行走机构设计 10
3.1主要零件设计 10
3.1.1齿轮齿条及圆柱齿轮的设计 10
3.1.2 锥齿轮设计 13
3.2电机选择 14
3.3轴的设计 15
3.4轴承和键及其他零件的的选用..........................................................................16
3.5导轨的选用 17
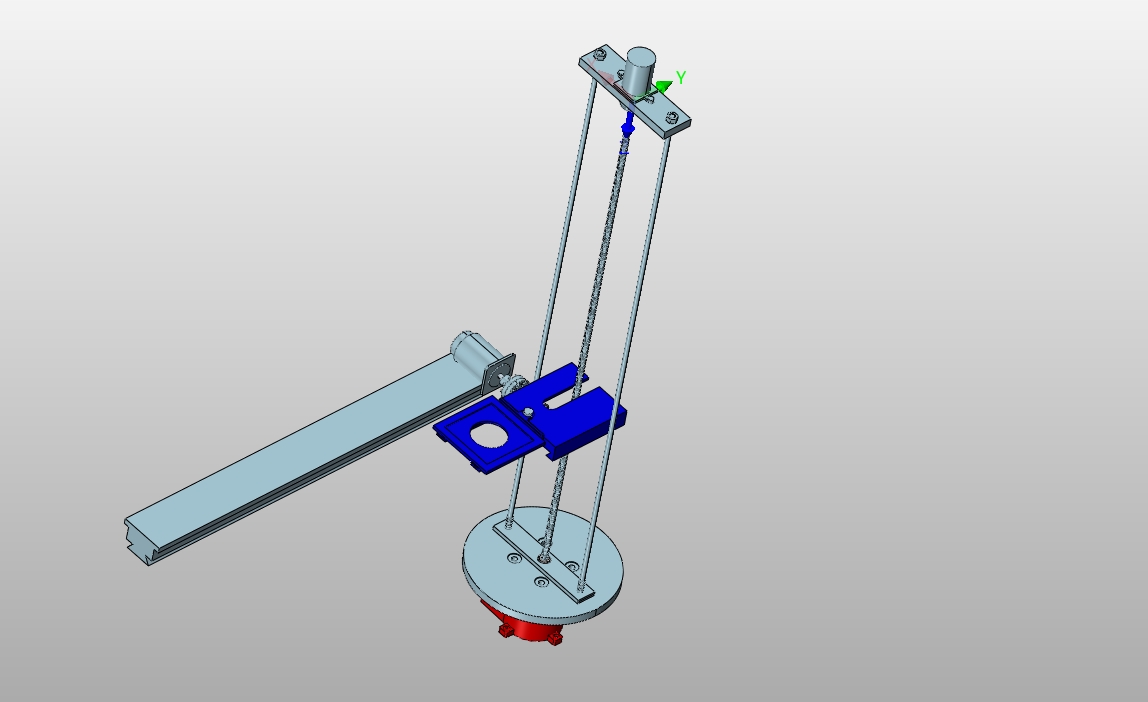
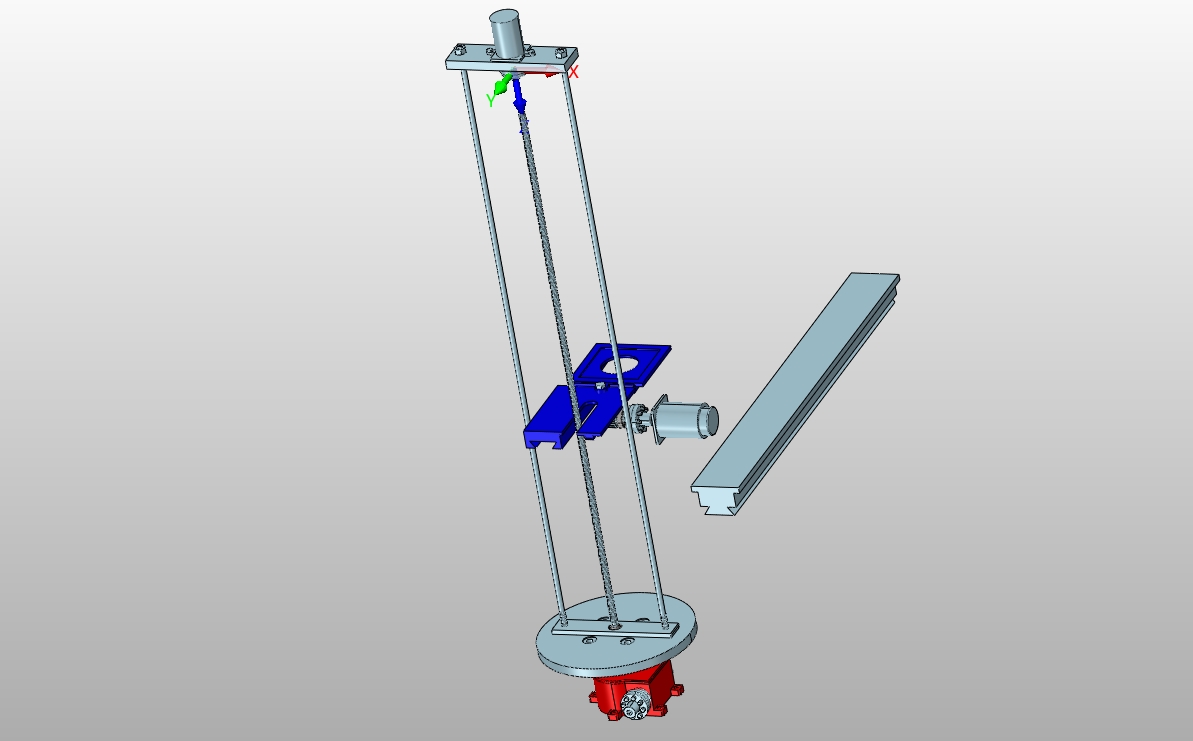
第四章 升降机构 19
4.1 螺杆螺母的设计 19
4.2螺杆螺母验算 20
4.2.1螺杆的耐磨性验算 20
4.2.2 螺纹强度校核 20
4.2.3 螺杆稳定性计算 21
4.2.4 螺杆螺母效率的计算 23
4.3 电机的选用 23
4.3.1.计算电动机的容量 23
4.3.2确定电动机的转速 24
4.3.3选择电动机类型 24 [资料来源:https://www.doc163.com]
4.4 轴承和键的选用 25
4.5 导轨的选用 25
第五章 Pro-Engineer的应用 26
5.1 Pro-E简介 26
5.1.1主要特征 26
5.1.2 Pro/E WildFire5.0的优势 27
5.1.3 Pro-E参数化建模及其运动与仿真简介 27
5.2行走机构的三维建模 32
5.2.1关键零件的建模 32
5.2.2 其他零部件的建模 36
5.2.3行走机构的装配 38
5.3升降机构的三维建模 41
5.3.1关键零件的建模 41
5.3.2其他零部件的建模 41
5.3.3升降机构的装配 42
5.4 堆垛机各机构的总成 43
第六章 总结与展望 46
参考文献 48
致 谢 50
[来源:http://Doc163.com]
上一篇:MQ5080单臂架门座起重机总体及运行机构设计(含CAD零件图装配图)
下一篇:车载双目视觉系统机械结构设计(含CAD图,CATIA三维图)