
基于dSPACE的汽车主动避撞实验研究(含CAD图,CATIA三维图)
基于dSPACE的汽车主动避撞实验研究(含CAD图,CATIA三维图)(任务书,开题报告,论文说明书15000字,CAD图纸5张,CATIA三维零件图)
摘 要
随着汽车工业的发展,高级智能驾驶与安全技术越来越受到重视。车辆避撞系统作为重要的汽车先进安全技术早在上世纪末就已经开始了研究,旨在提高道路交通安全水平。在此背景下,本文围绕着汽车主动避撞的程序设计设计与实验等问题,基于“控制策略分析-数学建模-实时仿真-实验验证”的思想,利用多种软件与硬件相结合的方式对主动避撞系统及其实验进行了研究验证。本文的研究内容主要包括以下几个方面:
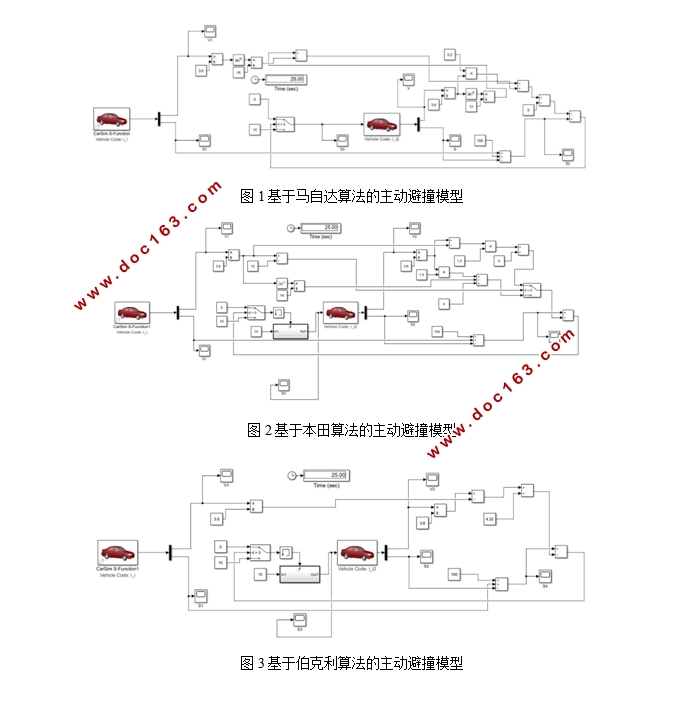
(1)基于电动汽车的尺寸与性能参数,在Carsim软件中建立了电动汽车的动力学模型。研究比较马自达、本田与伯克利安全距离算法的优缺点,基于这三种安全距离算法在Simulink软件中搭建主动避撞模型,对不同的危险工况进行仿真,分析比较出基于本田安全距离算法的主动避撞模型能满足各种工况的要求。
(2)构建了基于dSPACE平台的避撞程序,进行硬件在环的实时仿真,其结果与软件仿真结果一致都满足了避撞的要求,为后续的实车实验做下理论基础。
(3)在校内完成了低速的实车避撞实验。实验结果表明:设计的主动避撞系统能避免车辆与前方障碍物的碰撞。并根据实车实验的结果对本田算法中的关键参数进行了调整,使系统在满足安全的前提下更符合实际的驾驶风格。 [资料来源:https://www.doc163.com]
关键词:主动避撞系统,安全距离模型,实车实验,dSPACE
Abstract
With the development of automobile, advanced intelligent driving and safety technology havebeen paid more and more attention.Vehicle collision avoidance system, as an important advanced vehicle safety technology, has been studied as early as the end of last century.In such circumstance, focusing on the idea of "control strategy analysis -- mathematical modeling -- real-time simulation -- experimental verification",this paper designs the vehicle's active collision avoidance programby combining various software and hardware, thenverifies the system byexperiment.This paper mainly includes the following aspects:
(1)Based on the size and performance parameters of electric vehicle, the dynamic model of electric vehicle is established in Carsim.The advantages and disadvantages of Mazda, Honda and Berkeley safe distance algorithms were studied and compared.Based on these three safe distance algorithms, an active collision avoidance model was built in Matlab/Simulink to simulate different dangerous working conditions. After analyzing and comparing the results,it can be concluded that the active collision avoidance model based on Honda safe distance algorithm could meet the requirements of various working conditions.
(2)A collision avoidance program based on the dSPACE platform was built to carry out real-time simulation of the hardware in the loop. The results were consistent with the software simulation results, both of which meet the requirements of collision avoidance. This real-time simulation establishs a theoretical foundation for subsequent real vehicle experiments.
(3)In the school, a low-speed collision avoidance experiment with real electric car was carried out.The experimental results show that the designed active collision avoidance system can avoid the collision between vehicles and obstacles.The key parameters of Honda algorithm are adjusted according to the results of the real car experiment, so that the system is more consistent with the actual driving style under the premise of safety.
Keywords:Active collision avoidance system, safety distance model, vehicle experiment, dSPACE
此次选择的实验车为轮毂电机驱动的电动汽车,其整车的参数如下:
整车质量(Kg) 680
[版权所有:http://DOC163.com]
轴距(mm) 2020
轮距(mm) 1260
车轮半径(mm) 320
轮速传感器齿圈齿数(齿/圈) 90
单轮最大驱动/制动力矩(N.m) ±140
车轮转动惯量(Kg.m^2) 1.2
[资料来源:Doc163.com]




目录
第 1 章 绪论 1
1.1 问题提出与研究意义 1
1.2 汽车避撞国内外研究现状 1
1.3 车辆主动避撞系统存在的问题 2
1.4 本文的主要研究内容与结构安排 2
第 2 章 电动汽车主动避撞系统 4
2.1 电动汽车动力学建模 4
[资料来源:http://www.doc163.com]
2.2 主动避撞系统设计思路 5
2.3 安全距离模型 7
2.3.1 马自达安全距离算法 7
2.3.2 本田安全距离算法 8
2.3.3 加利福利亚大学的改进安全距离算法 10
2.4 本章小结 11
第 3 章 电动汽车主动避撞模型建立与仿真 12
3.1 三种典型工况分析 12
3.2 主动避撞模型建立与优化 12
3.3 主动避撞模型仿真 15
3.3.1 前方静止工况 15
3.3.2 前方紧急制动 17
3.3.3 旁车插入主车道 19
3.4 控制系统仿真硬件平台 20
3.5 避撞性能验证仿真 21 [来源:http://www.doc163.com]
3.6 本章小结 24
第 4 章 低速主动避撞实车实验 25
4.1 实验条件 25
4.2 实验原理 26
4.3 实验数据与分析 26
4.3.1 数据处理 26
4.3.2 数据分析 28
4.4 避撞模型参数改进 29
4.5 本章小结 30
第 5 章 全文总结 31
5.1 本文研究工作总结 31
5.2 需要进一步研究的内容 31
参考文献 32
附录 33
致谢 34
下一篇:分布式轮毂全轮驱动纯电动汽车总体方案设计(含CAXA图,CATIA三维图)