
汽车半主动悬架系统控制策略研究(CAD,ADAMS,Simulink,CATIA三维图)

汽车半主动悬架系统控制策略研究(CAD,ADAMS,Simulink,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书28000字,CAD图纸3张,CATIA三维图,ADAMS,Simulink)
摘要
在汽车的所有组成部件中,悬架系统可谓是其中十分重要的一部分。它的功用是把路面作用到车轮上的垂直反力、纵向反力和侧向反力以及这些反力所造成的力矩都传递到车架上,以保证汽车的正常行驶[1]。与此同时,它也决定着汽车的行驶平顺性以及操纵稳定性。由于传统的被动悬架只能保证在一种特定的道路状态和行驶速度下才能到达性能最佳,这就决定了它的适用面不会很广阔。所以在本文中,我们基于模糊PID控制理论提出了一种新型的汽车半主动悬架控制系统。这种控制系统不仅有模糊控制适用面广的优点,还有PID控制易于调节的优点,因此可以将其应用于汽车的半主动悬架系统的控制中。
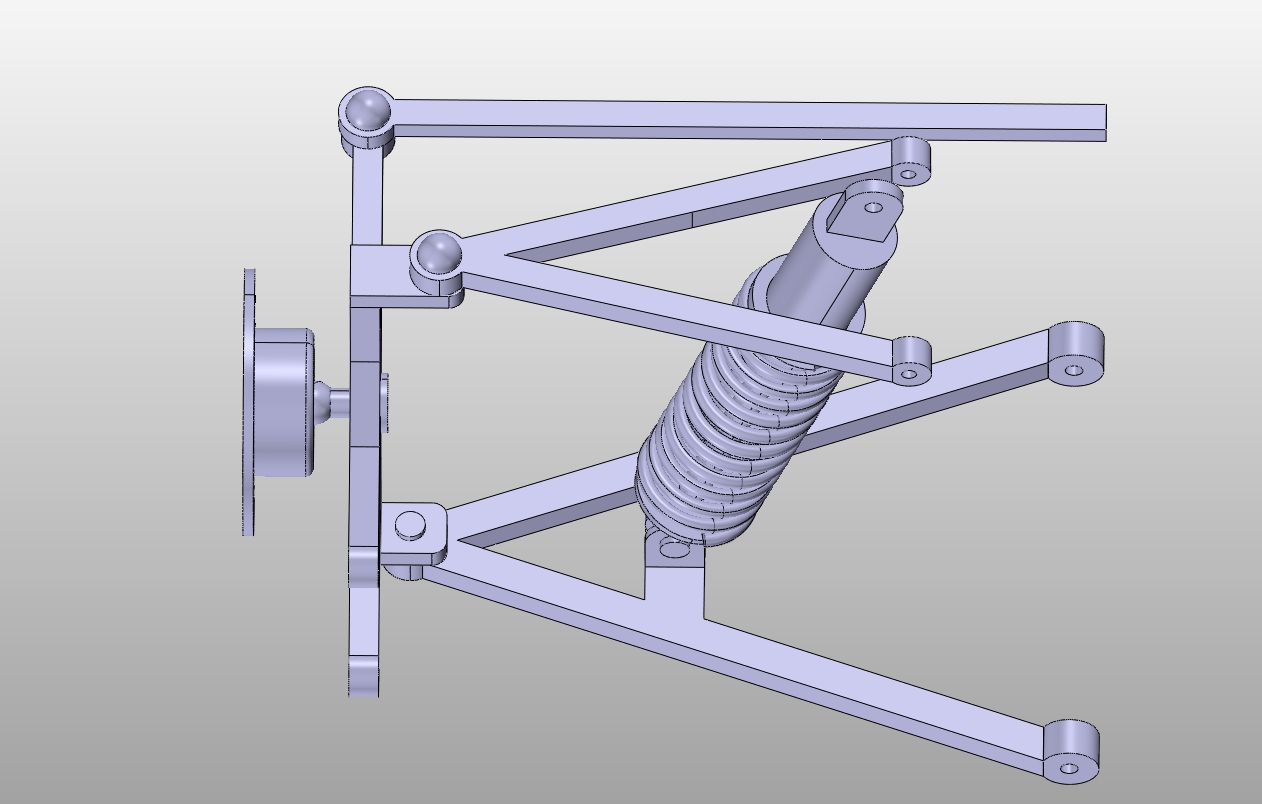
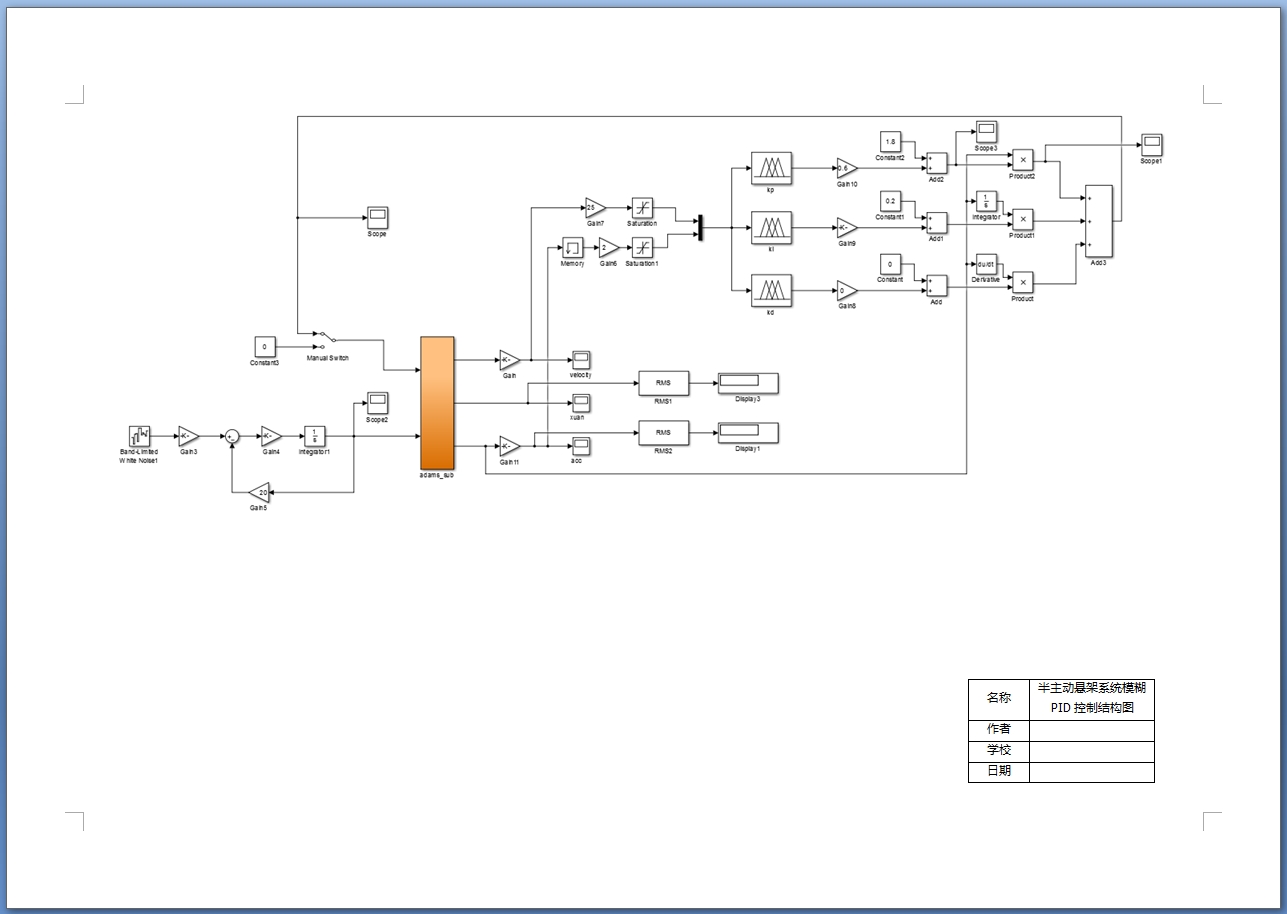
在本文中我们建立的是汽车的1/4半主动悬架系统模型。与此同时,我们也是以这个模型为研究对象,首先利用ADAMS软件搭建它的机械模型。搭建完毕后,我们可以利用ADMAS软件自带的Control模块生成adams_sub模块。该模块可以实现ADAMS软件与MATLAB之间的联合仿真。然后在MATLAB软件中,我们利用Simulink模块来搭建半主动悬架系统的模糊PID控制器模型。它的输入是ADAMS软件中半主动悬架系统模型的车身垂直速度以及车身垂直加速度,它输出到ADAMS中机械模型的是半主动悬架系统的可调阻尼力的大小。最后,利用B、C级路面激励来对汽车1/4半主动悬架系统进行仿真分析。结果证明,本文中所搭建的模糊PID控制器能够很好地改善汽车的行驶平顺性及其操纵稳定性。 [资料来源:http://www.doc163.com]
关键词:半主动悬架系统;MATLAB;ADAMS;联合仿真;模糊PID控制器
Abstract
In the all components of the car, the suspension system can be described as a very important part of it. Its function is to transmit the vertical reaction force, longitudinal reaction and lateral reaction force caused by the road to the wheel as well as the torque caused by these reaction force to the frame to ensure the normal driving of the car. At the same time, it also determines the car ride comfort and handling stability. On account of the traditional passive suspension can only guarantee the best performance in a certain road state and driving speed, the application surface is not very broad. So in this paper, we propose a new control system of semi-active suspension based on fuzzy PID control theory. This control system not only has the advantages of fuzzy control theory with broad application, but also has the advantages of PID control theory easy to adjust. So that it can be applied to the control of the vehicle semi-active suspension system.
[资料来源:http://Doc163.com]
In this paper, we build the model of automobile 1/4 semi-active suspension system. At the same time, we also set the model as the object of the study. Firstly, we use ADAMS software to build its mechanical model. After building, we can use the Control module of ADMAS software to generate adams_sub module. This module can achieve the joint simulation between ADAMS software and MATLAB. Then in the MATLAB software, we use the Simulink module to build a fuzzy PID controller model of semi-active suspension system. Its input is the vertical speed of the body and the vertical acceleration of the semi-active suspension system model in the ADAMS software. Its output to the ADAMS mechanical model is the adjustable damping force of semi-active suspension system. Finally, we achieve the simulation analysis of automobile 1/4 semi-active suspension system by using B and C road surface excitation. The results show that the fuzzy PID controller constructed in this paper can well improve the ride comfort and the stability of the vehicle.
[资料来源:https://www.doc163.com]
Key words:semi-active suspension; MATLAB; ADAMS; joint simulation; fuzzy-PID controller
[资料来源:http://www.doc163.com]



 [版权所有:http://DOC163.com]
[版权所有:http://DOC163.com] 
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究的目的及意义 1
1.2 汽车悬架系统概述 1
1.3 半主动悬架系统的控制策略 3
1.4 半主动悬架系统的国内外研究现状 6
1.5 本论文的研究内容以及章节安排 7
1.5.1 本论文的研究内容 7
1.5.2 论文各章节安排 7
第2章 半主动悬架系统的动力学建模及分析 9
2.1汽车悬架系统的性能评价 9
2.2 路面输入模型 10
2.3汽车半主动悬架系统动力学建模 12
2.3.1 汽车被动悬架动力学模型 13
2.3.2 汽车半主动悬架动力学模型 13
2.4 本章小结 14
第3章 基于ADAMS软件的汽车半主动悬架系统建模 15
3.1 ADAMS软件简介 15
3.2基于ADAMS软件的汽车半主动悬架系统模型的建立 16
3.2.1创建汽车半主动悬架模型 16
3.2.2定义输入输出变量 21
3.3 本章小结 24
第4章 半主动悬架系统的模糊PID控制 25
4.1 PID控制理论 25
4.1.1 PID控制器的基本原理 25
4.1.2 PID控制器的特点及其参数整定 27
4.1.3 半主动悬架系统的PID控制 28
4.2 模糊控制理论 28
4.2.1 模糊集合和隶属函数 29
4.2.2 模糊关系及其合成 29
4.2.3 模糊推理 30
4.2.4 模糊控制器的基本结构及其组成 30
4.3 半主动悬架系统模糊PID控制器的设计 31
[资料来源:http://www.doc163.com]
4.3.1 模糊PID控制器的基本原理 32
4.3.2 半主动悬架系统模糊PID控制器的设计 32
4.3.3 半主动悬架系统模糊PID控制仿真模型的建立 35
4.4 本章小结 36
第5章 汽车半主动悬架系统的仿真分析 37
5.1 B级路面输入下的仿真分析 37
5.2 C级路面输入下的仿真分析 41
5.3 本章小结 45
第6章 总结与展望 46
6.1 全文总结 46
6.2 工作展望 46
参考文献 47
附录 49
致谢 51 [资料来源:www.doc163.com]
上一篇:车用燃料电池的工作过程建模仿真设计(含CAD图,CATIA三维图)
下一篇:纯电动汽车整车控制器强电上下电控制检测及控制策略开发(含CAD图)