
爬墙机器人总体结构及清洗装置、控制系统硬件设计

资料介绍:
爬墙机器人总体结构及清洗装置、控制系统硬件设计(任务书,开题报告,外文翻译,设计说明书28000字,CAD图纸5张)
摘要:爬壁清洗机器人是一种能够在垂直壁面上进行清洗作业的移动式服务机器人。它属于极限作业机器人的一种,可以将人从危险的工作中解脱出来,因而在建筑清洗行业有着广泛的用途和很高的使用价值。研究高效、简洁的高楼壁面清洗机器人正是本课题的要求。
使用爬壁清洗机器人进行高层建筑幕墙自动清洗,其实现的关键是机器人的移动方式、吸附方式以及清洗技术。本文研究的目的是设计一种面向高层幕墙的可靠、高效、省时、安全的清洗作业系统。因此,如何合理实现爬壁清洗机器人的三大技术是本设计的关键。
本文通过对国内外爬壁清洗机器人现状进行了系统的分析与比较,l论文主要论述了爬壁清洗机器人的行走方式、吸附方式、清洗装置、控制系统。首先介绍了国内外爬壁机器人研究现状,阐明本课题研究的目的、意义。然后进一步介绍了本爬壁清洗机器人总体结构,同样也要求设计出合理高效的清洗装置,并在此基础上着重阐述了爬壁清洗机器人控制系统主要问题及其解决方法,机器人的控制系统主要必须完成对机器人行走、吸附、清洗等的控制,必须具有操作简单、可靠、高效、方便等特点。
[资料来源:http://doc163.com]
关键词: 爬壁机器人 清洗 移动 吸附 机器人控制
The Designing of the Overall Structure , Cleaning Device and Control System of the Climbing Robot
Abstract:A climbing robot that provides cleaning service on the glass wall of high-rise buildings is a moving service robot which can do the cleaning job on the vertical walls . It is one of the limit operations that can relieve human beings from hazardous jobs, thus it has a wide range of applications and high value in the cleaning construction industry. Researching efficient, simple wall cleaning robot is the request of the subject.
The use of wall-climbing robot for cleaning high-rise building walls automatic cleansing, its realization is the key to the way of move, adsorption and cleaning technology. The purpose of this paper is to design a cleaning system which is reliable, efficient, time-saving and safe. Therefore, how to reasonably achieve the three technologies of the wall-climbing cleaning robots is the key to the design.
[资料来源:https://www.doc163.com]
By the analysis and comparison to internal and external wall-climbing cleaning robot, the paper mainly discusses the way of move, adsorption, cleaning equipment, and control system. In the first place, it introduced the research status of the domestic and abroad wall-climbing cleaning robot and pointed out the purpose and significance of this paper. Then it informed us further of the overall structure of the cleaning of the wall-climbing robots, requesting to design a rational and efficient cleaning device as well. Based on it, it explained the main problems and solutions of the wall-climbing cleaning robot control system. The control system of the robot must be completed for the move of robot, adsorption, cleansing control, and simple, reliable, efficient and convenient features.
Keywords: climbing robot cleaning move adsorption robot control
研究内容
本课题主要的研究内容如下:
1) 爬壁清洗机器人的总体方案设计。针对我国目前玻璃幕墙清洗行业的现状,开发出一种结构新颖、安全可靠、重量轻、效率高的爬壁清洗机器人。 [资料来源:www.doc163.com]
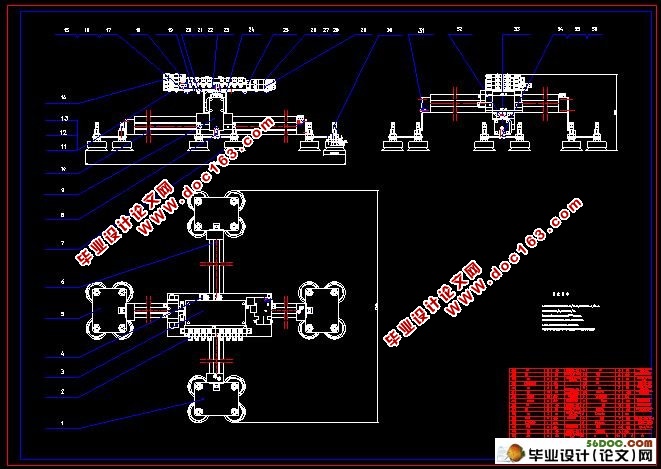
2) 爬壁清洗机器人本体结构设计。对机器人的安装设计做了详细介绍,并画出了爬壁清洗机器人的装配图。
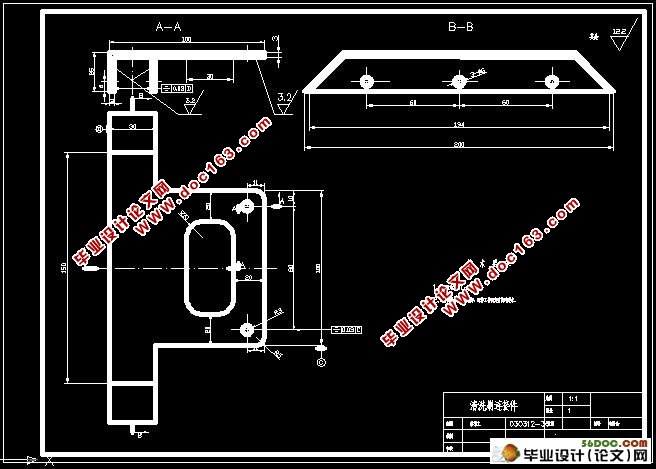
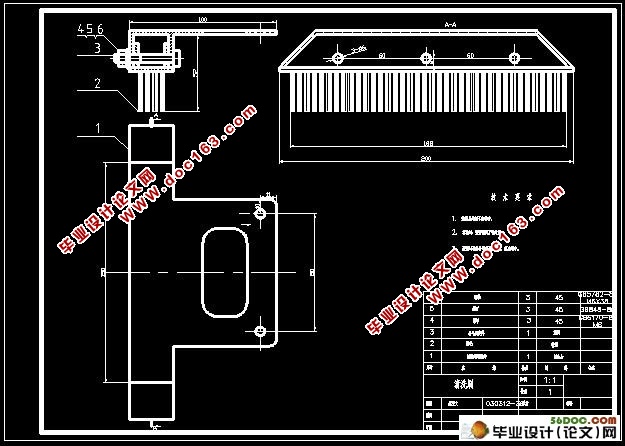
3) 爬壁清洗机器人的清洗装置设计。通过对清洗的方法与现状进行分析,设计出简单、有效的清洗装置,并对清洗的路径进行了有效的规划。
4) 爬壁清洗机器人的控制系统的硬件设计。选择用PLC控制,因PLC系统结构紧凑、质量轻、安装方便。
1.6.2 目标
1) 机器人能向上、下、左、右四个方向上移动、停留、可以携带清洗刷完成对玻璃壁面的清洗作业。
2) 机械结构设计合理、紧凑、重量轻、可靠性高且负载能力强。
3) 移动精度较高,能垂直到达垂直平面的任何地方。
4) 机器人控制灵活、简单、可靠、安全,从而实现机器人的自动化清洗。
爬壁机器人的结构设计首先要确定机器人的技术性能指标,而技术性能指标是由机器人所要完成的任务确定的。许多技术性能指标之间是相互影响、相互关联的,技术性能指标设定是否合理与机器人的结构设计密切相关。对于爬壁清洗机器人来说,其环境和任务要求是比较明确的,因此需要以此为出发点设计机器人的各项技术性能指标。技术性能设计指标:
[资料来源:http://Doc163.com]
机器人爬行速度:0~2m/min( 无级可调)
移动速度指标的设定主要基于高效性和安全性两个因素考虑的。
控制方式:无线遥控或程序控制
控制系统的功能是对组成机器人各个部分进行的行走,清洗,壁面吸附以及停止。
吸附方式:负压吸附(正常负压为-600mmH2O)
吸附方式的确定要综合考虑到机器人的工作环境以及可行性。
最大有效负载:≤15Kg
爬壁机器人的负载包括本体质量(自质量)和工作负载质量。
[版权所有:http://DOC163.com]
[资料来源:http://doc163.com]
目 录
1 绪论
1.1 爬壁机器人概述 (1)
1.2 壁面清洗发展阶段 (2)
1.3 国内爬壁清洗机器人的发展状况 (3)
1.3.1单吸盘真空吸附式爬壁机器人发展状况 (3)
1.3.2 多吸盘真空吸附式爬壁机器人发展状况 (4)
1.3.3 磁吸附爬壁机器人发展状况 (5)
1.3.3 其它类型爬壁机器人发展状况 (6)
1.4 爬壁清洗机器人研究的技术难点 (6)
1.5 爬壁清洗机器人的应用前景 (7)
1.6 爬墙清洗机器人研究内容及目标 (7)
1.6.1 研究内容 (7)
1.6.2 目标 (7)
2 爬壁清洗机器人系统方案设计
2.1 技术性能指标 (9)
2.2 爬壁机器人的总体方案设计 (9)
2.2.1 爬壁清洗机器人的移动方式 (9)
2.2.2 爬壁清洗机器人吸附方式 (10)
2.2.3 爬壁清洗机器人清洗装置 (11)
[资料来源:http://doc163.com]
2.2.4 爬壁清洗机器人控制方案 (12)
2.2.5 爬壁清洗机器人驱动方案 (12)
2.4 小结 (14)
3 爬壁清洗机器人本体设计
3.1 清洗机器人本体结构 (16)
3.2 机器人气动元器件选择 (17)
3.2.1 X、Y驱动气缸 (18)
3.2.2 短行程气缸 (18)
3.2.3 真空发生器 (18)
3.2.4 真空吸盘 (20)
3.2.5 CPE电磁阀 (20)
3.2.6 单向节流阀 (21)
3.4 安装台面设计 (21)
3.4 安装台面上元器件安装 (22)
4 清洗装置设计
4.1 墙面污垢形成原因 (24)
4.2 清洗装置整体设计 (25)
4.2.1 清洗剂的选择 (25)
4.2.2 喷淋系统的设计 (25)
4.2.3 清洗刷的设计 (26)
4.3 爬壁清洗机器人的清洗过程 (27) [版权所有:http://DOC163.com]
5 机器人控制系统硬件设计
5.1 爬壁清洗机器人控制系统概述 (31)
5.2 PLC特点 (31)
5.3 机器人控制系统硬件设计 (32)
5.3.1 PLC选型 (33)
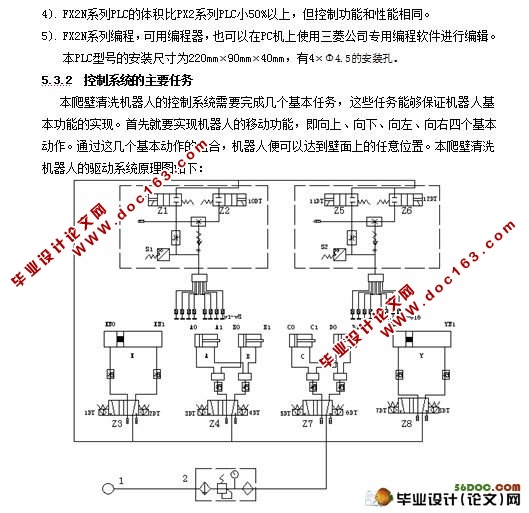
5.3.2 控制系统主要任务 (34)
5.3.3 PLC输入/输出端子接线 (36)
5.4 机器人控制系统程序实现 (36)
5.4.1 PLC软件系统程序结构 (36)
5.4.2 PLC接口信号定义 (37)
5.4.3 初始化程序 (38)
5.4.4 四个基本动作程序实现 (38)
5.5 小结 (42)
6 结论与展望
结论与展望 (43)
参考文献 (45)
致 谢 (46)
附录 A梯形图 (47)
附录 B PLC输入/输出端子接线图…………………………………(55)
[资料来源:https://www.doc163.com]
附录 C气动系统中执行元件与控制信号 (56)
附录 D 英语原文 (57)
附录 E 中文翻译 (73)
[资料来源:http://Doc163.com]
上一篇:基于SolidWorks六自由度焊接机械手三维运动模拟
下一篇:1G-100型水旱两用旋耕机设计