
冲床上料机械手的设计

摘 要
工业机械手是近几十年来发展起来的一种高科技自动化生产设备。生产中应用机械手可以提高生产的自动化水平和劳动生产率,可以减轻劳动强度、保证产品质量、实现安全生产。本设计是针对冲床的工作特点进行的专用机械手设计。冲床加工多为板材件,因此在本设计中机械手的手部采用气流负压式吸盘机构,方便吸取材料。整个机械手采用圆柱坐标结构,手臂用水平和竖直两个气压缸推动,能够快速完成将工件吸取到工作位置的动作,提高工作效率。
关键词:冲床 机械手 自动化
Abstract
Industrial manipulator is in recent decades developed a kind of hing-tech automation production equipment.Production application manipulator can be used to increase the production level of automation and labor productivity, reduce labor intensity, assure product quality, achieve the safety in production.This design is aimed at the working characteristics of punch special manipulator design.For more impacting processing,so in this board piece in the design of manipulator hand adopting airflow suction cups institutions,convenient draw materials.The whole manipulator using cylindrical coordinates structure,with horizontal and vertical two arms.The air cylinder can rapidly push completion will draw to work position of workpiece action,improve work efficiency.
[来源:http://www.doc163.com]
KeyWords:punching machine manipulator automation
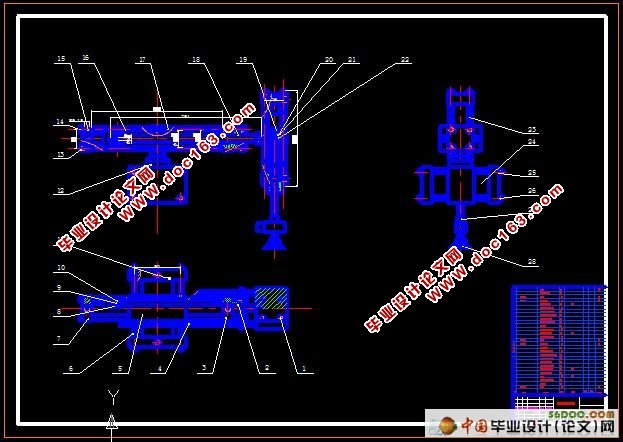
1.机械手为冲床机械手,选用圆柱坐标和三自由度,机械手的各执行机构包括手部手臂腰部等。采用负压式吸盘来吸取板材料。
2.该机械手在工作中需要3种运动,其中水平手臂的伸缩和竖直手臂的升降为两个直线运动,另一个为手臂的回转运动。综合考虑机械手自由度数目取3,坐标形式选择圆柱坐标形式,即一个转动自由度,两个移动自由度。其特点是结构比较简单,手臂运动范围大,且有较高的定位精度。
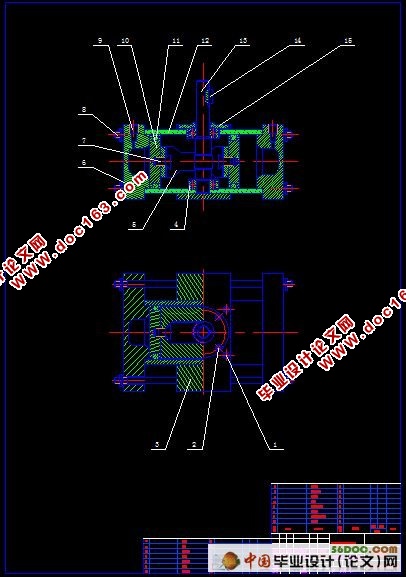
3.考虑到腰部是机械手的第一个回转关节,对机械手最终精度影响较大,故采用齿轮齿条式摆动气缸实现腰部的回转运动。
4.考虑到机械手的动态性能及运动的稳定性、安全性,两手臂的驱动方式均选择气压驱动方式,通过气压缸直接驱动手臂的运动。
5.本次设计所设计的机械手结构简单,体积小巧,适用于小型冲床上料使用。该机械手有运动速度快,定位准确等特点。
机械手的基本参数有抓重(即臂力)、自由度、工作行程(或转角)、工作速度和定位精度。
升降行程:80毫米
手臂伸缩行程:200毫米
手臂回转角度:0~90°
驱动方式:气压驱动
[资料来源:http://doc163.com]
控制方式:点位程序控制
[资料来源:http://doc163.com]


[资料来源:http://doc163.com]
目 录 16000字
摘 要 I
Abstract II
1 绪论 1
1.1 工业机械手概述 1
1.2 工业机械手的国内外研究现状和发展趋势 2
1.2.1 气动机械手的发展 3
1.3 机械手的组成 6
1.4 本次设计的目的 9
2 机械手的总体设计 10
2.1 机械手总体结构类型 10
2.1.1 设计具体采用方案 12
2.2机械手腰部结构 14
2.2.1 腰部结构具体采用方案 14
2.3机械手手臂结构 15
2.3.1 手臂结构具体采用方案 16
2.4机械手手部结构 20
2.4.1 真空系统的组成 20
2.4.1 手部真空发生器的原理 21
3 基本参数的确定 24
3.1 参数确定 24
3.1.1 抓重(即臂力) 24 [资料来源:http://www.doc163.com]
3.1.2自由度、工作行程及转角 24
3.1.3工作速度 24
3.1.4定位精度 25
4 机械手机械结构设计 26
4.1 手部的设计计算 26
4.1.1 工件的基本参数 26
4.1.2真空吸盘的计算选择 26
4.2 手臂的设计计算 29
4.2.1 竖直手臂的设计计算 29
4.2.2水平手臂的设计计算 34
4.3 腰部的设计计算 39
结 论 43
参考文献 44
致 谢 45 [资料来源:http://Doc163.com]
下一篇:车床上料机械手结构设计☆