
单臂回转式机械手机械系统的设计(含CAD图)

单臂回转式机械手机械系统的设计(含CAD图)(任务书,论文说明书8600字,CAD图3张)
摘要
在工业生产中间,机械手可以代替人的繁重劳动,从而实现生产的机械化和自动化,能在有害环境下操作,这样子能够保护人身安全,很大程度提高劳动效率和改善工人工作环境,在很多方面都体现出其不可替代的优势,因而在工业生产中应用广泛。本次所设计的机械手,为单臂回转式机械手,对机械手的要求是搬运一个一千克的铁块,从一个平台到另一个平台,旋转角度为90度。从上面的这些条件可以看出,对于机械手结构的选取就比较的多样化。我们可以选择圆柱坐标型的,也可以选择较为复杂的球坐标型和关节型。根据对机械手的运动部分结构的设计及选型,以及选定的夹持的方式,我们定出了机械手的总体结构,其中包括两个相互平行的液压缸和一个旋转的气压缸、电磁铁吸附装置、支座和底座。两个液压缸用于升降运动,气压缸用于回转运动,夹持器主要部分为一个吸附式电磁铁。此次设计中机械手动作固定,结构简单,可靠性较高,易于拆装,可用于机械设计和液压相关课程实验教学中的演示和拆装练习。
关键词:机械手 圆柱坐标型 液压缸 气压缸 吸附式
[版权所有:http://DOC163.com]
The design of the mechanical system of the Single Arm Rotary Manipulator
Abstract
During the industrial production, the manipulator can substitute the heavy working of the workers, which can undergo the hazardous conditions, to realize the mechanization and automation of the production. According to these, the manipulator can ensure the personal safety, improve the effectives of the production and ameliorate the working conditions of workers. In many aspects, the manipulators reflect its irreplaceable advantages to be used widely in the industrial production. The manipulator designed in this paper is a single arm rotary manipulator, which requires the manipulator to move a kilogram of the iron from one platform to another, the rotation angle is 90 degrees. As the selection of the manipulator’s structure is diversification, we can choose the cylindrical coordinate type, or we can choose the more complex one, the ball coordinate type or the joint type. According to the design and the selection of the motion part structure of the manipulator, and the determined clamping way, we define the overall structure of the manipulator, which including a pneumatic cylinder and two hydraulic cylinders which are mutually parallel, an electromagnet adsorbing device, bearing and a base. The hydraulic cylinders are respectively used for the lifting movement and the pneumatic cylinder is for the turning movement. The holder’s main part is an adsorption type of the electromagnet. In this paper, the designed manipulator has following advantages: the motion is fixed, the structure is simple, the reliability is high and the manipulator is easy to assemble and disassemble. The manipulator can be used in the related mechanical design and hydraulic course for the experiment teaching, as the demonstration and disassembly practice.
[资料来源:http://doc163.com]
Keywords: manipulator, cylindrical coordinate type, hydraulic cylinder, pneumatic cylinder, absorption
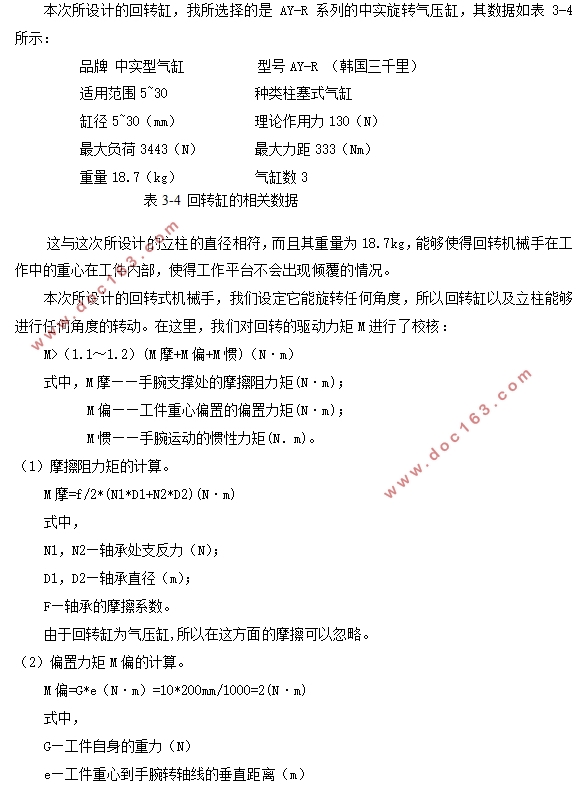
本次所设计的回转缸,我所选择的是AY-R系列的中实旋转气压缸,其数据如表3-4所示:
品牌 中实型气缸 型号AY-R (韩国三千里)
适用范围5~30 种类柱塞式气缸
缸径5~30(mm) 理论作用力130(N)
最大负荷3443(N) 最大力距333(Nm)
重量18.7(kg) 气缸数3


目录
摘要 I
Abstract II [资料来源:https://www.doc163.com]
第一章 绪论 1
1.1前言 1
1.2机械手的简介 2
1.2.1机械手的应用 2
1.2.2机械手的基本结构形式 2
1.2.3机械手的组成 3
1.3机械手的发展 5
1.3.1机械手的发展 5
1.3.2机械手的发展前景 5
第二章 设计任务 7
2.1本文研究内容及意义 7
2.2回转式机械手的设计用途 7
2.3论文设计进程安排 8
第三章 回转式机械手机械系统的设计 9
3.1回转式机械手总结构图的设计 9
3.2 回转式机械手回转部分的机械设计 11
3.3回转式机械手大臂的机械设计 13
3.4 回转式机械手小臂的机械设计 14
3.5 回转式机械手的抓取部分的机械设计 16
3. 6 回转式机械手立柱部分的设计 17
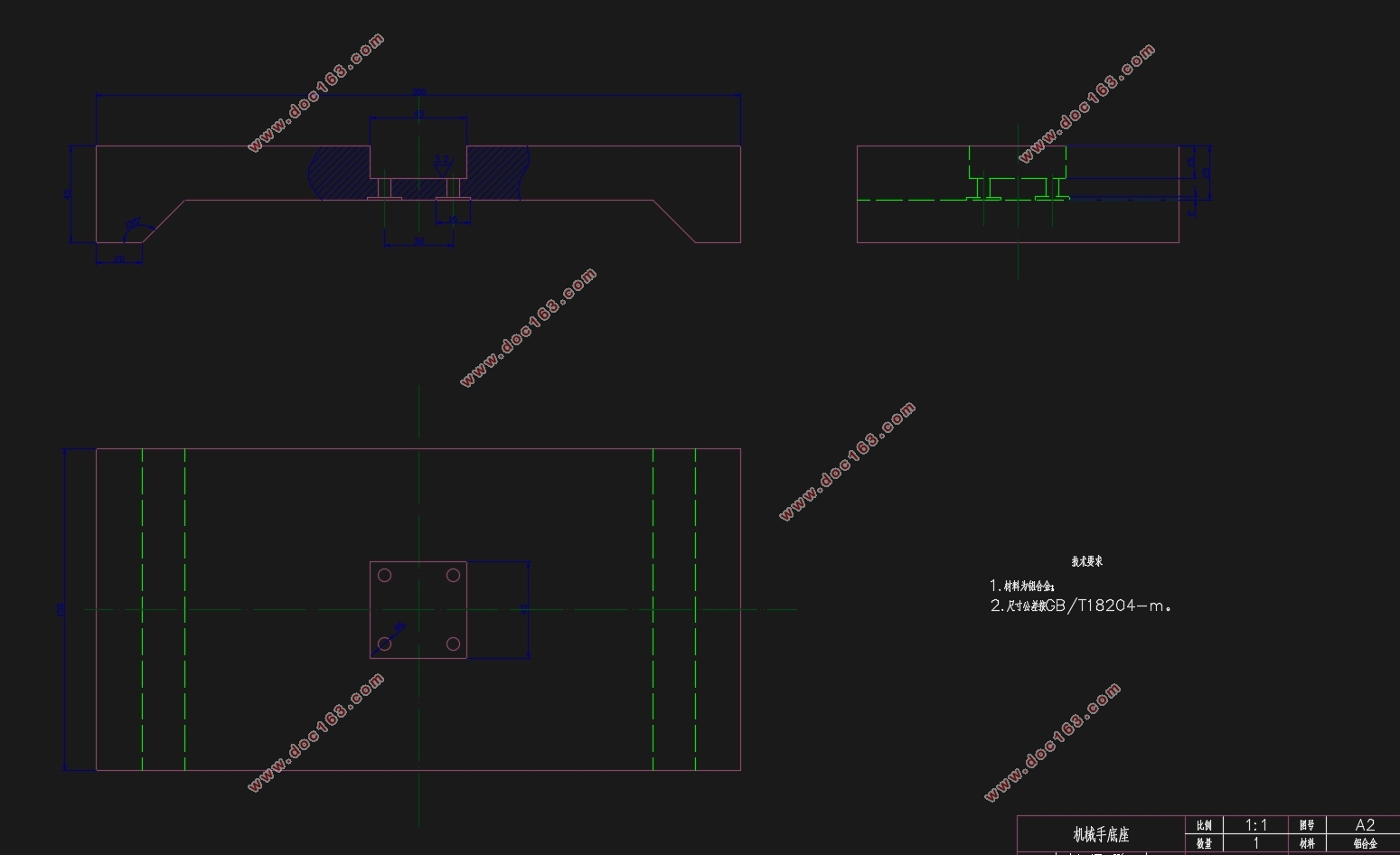
3.7 回转式机械手底座部分的设计 18
总结 19
参考文献 20
谢辞 21
[资料来源:http://Doc163.com]
上一篇:常用机构优化与仿真设计―凸轮模块(含Pro/E三维图)