
四履带搜救机器人机械结构设计-摆臂设计

四履带搜救机器人机械结构设计-摆臂设计(开题报告,中期检查表,外文翻译,论文说明书23000字,CAD图4张)
摘 要
本论文研究工作的目的是设计结构新颖、具有独创性的可携带、抗一定冲击的履带移动机器人,以能够适应在恶劣环境和复杂路况下工作。通过在移动系统上加载不同的探测传感设备,能够实现搜救机器人不同的使用功能,本研究意义在于为后续设计的搜救机器人提供一个基础的动力平台,以便于能够开发出更多使用功能的搜救机器人。
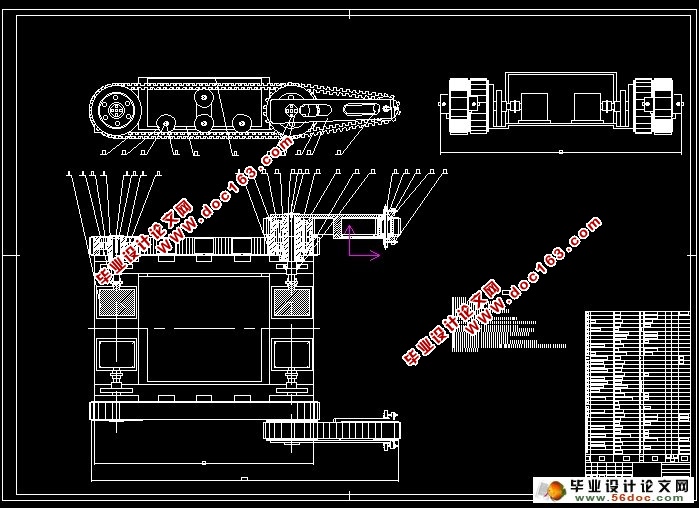
本研究所设计的搜救机器人移动方案是履带式驱动结构。该方案采用模块化设计,便于拆卸维修,可以适应不同情况的复杂路面,并可主动控制两侧肋板的转动来调节机器人姿态变化,辅助爬坡、越障和跨沟;机器人经过合理的结构布局和设计后具有良好的环境适应能力、机动能力。本论文所设计主的机器人移动机构主要由四部分组成:主动轮减速驱动机构、肋板转动机构、摆臂减速器机构、履带及履带轮运动机构。
关键字:搜救机器人;摆臂,履带式 减速器 [资料来源:http://www.doc163.com]
Abstract
The purpose of this thesis is to design novel structure, its unique portable,shoc-k intelligently tracked mobile robot, in order to be able to adapt to the harsh environment and the complicated road to work.Mobile systems loaded by different mo-ules, search and rescue robots can be achieved using different functions, this studyis important because other people's search and rescue robot designed to provide a basis for the dynamic platform to facilitate greater use of features can developsear-ch and rescue robots. This resoarch is moving search and rescue robot crawler.The program is modular in design, easy disassembly maintenance, can be complex adaptive sub-surface, active control can turn on both sides of flange module to adjust the robot pose changes, supporting climbing,obstacle and cross-channel.The design of the robot moving mechanism mainly consists of four components. Active wheel reducer drive mechanism, flange rotation institutions, adaptive road implementing agencies, sports organizations track and track wheels.
[资料来源:Doc163.com]
Key words: search and rescue robots; swing arm;crawler;
Retarder;
目录
前 言................................................3 [资料来源:http://Doc163.com]
1 绪 论..............................................7
1.1课题研究背景及意义...............................7
1.1.1 课题研究背景..............................7
1.1.2 课题研究意义..............................8
1.2国内外的研究概况.................................9
1.2.1 国外研究现状..............................9
1.2.2 国内研究现状.............................14
1.2.3 搜救机器人的技术发展方向.................17
2 搜救机器人的移动机构分析...........................21
2.1井下复杂环境对搜救机器人的要求..................21
2.2移动机构方案论证分析............................22
2.2.1 轮式移动机构特点.........................22
2.2.2 腿式移动机构特点.........................23
2.2.3 履带式移动机构特点.......................24
2.2.4 履、腿式移动机构特点.....................25 [资料来源:Doc163.com]
2.2.5 轮、履、腿式移动机构性能比较.............26
2.3 本研究采用的行走机构...........................26
2.4 救灾机器人性能指标与设计.......................27
2.5 本章小结.......................................28
3 搜救机器人运动参数设分析计算.......................29
3.1 机器人越障分析.................................29
3.1.1 机器人跨越台阶...........................30
3.1.2 机器人刮越沟壑...........................32
3.2 斜坡运动分析...................................33
3.3 本章小结.......................................34
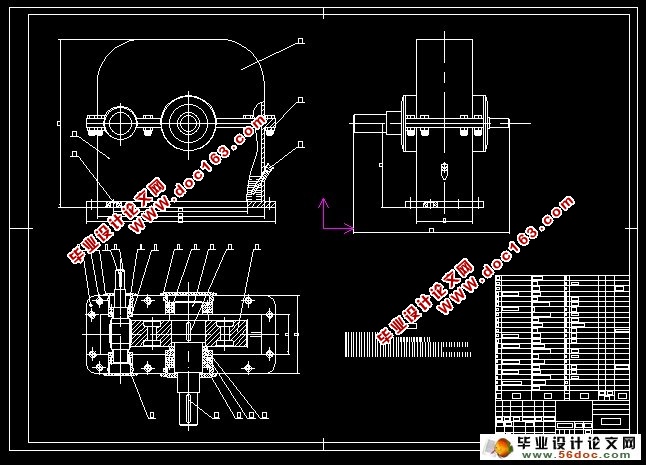
4 摆臂减速去设计.....................................35
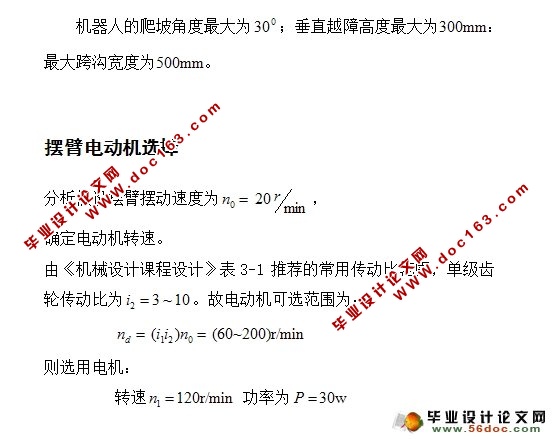
4.1 摆臂电机选择...................................35
4.2 摆臂减速器设计.................................35 [来源:http://www.doc163.com]
4.2.1 减速器方案对比分析...................... 35
4.2.2 减速器应满足要求.........................37
4.3 摆臂减速器设计计算.............................37
4.3.1 摆臂减速器的参数计算.....................37
4.3.2 摆臂减速器的齿轮计算.....................39
4.3.3 轴的设计.................................43
4.4 本章小结.......................................47
5 履带的设计计算.....................................49
5.1 带的选择.......................................49
5.2 计算带的型号和节距.............................50
5.3 计算主从动轮直径...............................51
5.4 本章小结.......................................52
6 摆臂结构设计.......................................53
6.1 摆臂作用.......................................54
6.2 肋板部分设计...................................56
6.3 摆臂参数计算...................................58
[资料来源:Doc163.com]
7 总结与展望..........................................59
致谢................................................61
参考文献............................................62
[来源:http://Doc163.com]
上一篇:液压支架的顶梁立柱的设计
下一篇:现场铣削提升机滚筒衬板绳槽装置(含CAD零件图装配图)