
臂架型电动叉车工作装置设计研究(含CAD图,SolidWorks三维图)
臂架型电动叉车工作装置设计研究(含CAD图,SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书15000字,CAD图1张,SolidWorks三维图)
摘要
本文基于市场对于伸缩臂叉车的迫切需求,参考国外产品,考虑了伸缩臂叉车在各种复杂环境下能实现较大的变幅角度和举升高度,并拥有较强的工作能力和安全性,尽可能达到国外市场上同类产品的性能要求。在此基础上进行伸缩臂叉车的总体设计和工作装置的设计研究。
本文主要研究内容如下:
(1)掌握伸缩臂式叉车的主要用途和国内外发展现状;
(2)完成伸缩臂式叉车的总体设计,对伸缩臂式叉车各主要零部件进行选型和布置。并对伸缩臂式叉车的牵引性能、机动性能、制动性能和稳定性进行验算;
(3)设计伸缩臂叉车的臂架结构,包括平动机构设计、液压油缸设计、支撑装置设计等;并对伸缩臂结构的强度、刚度、稳定性进行校核,最后运用ANSYS软件对伸缩臂结构进行有限元分析;
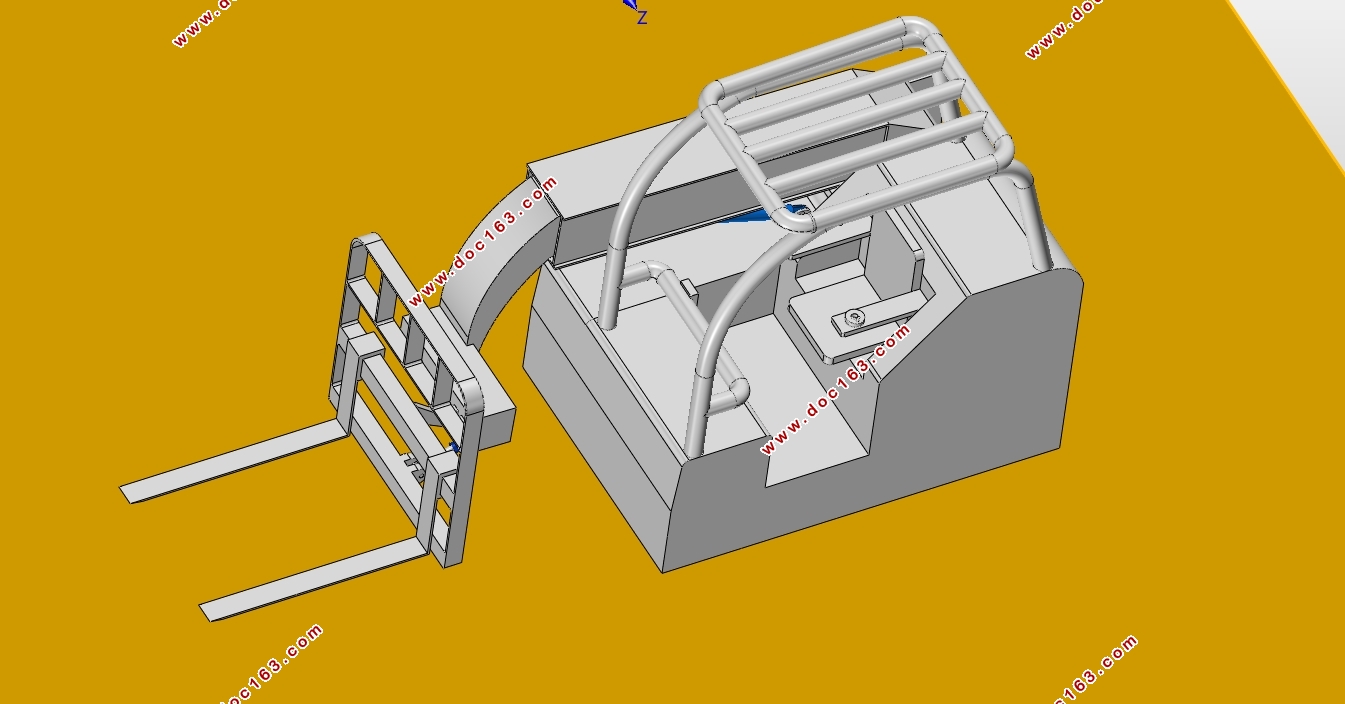
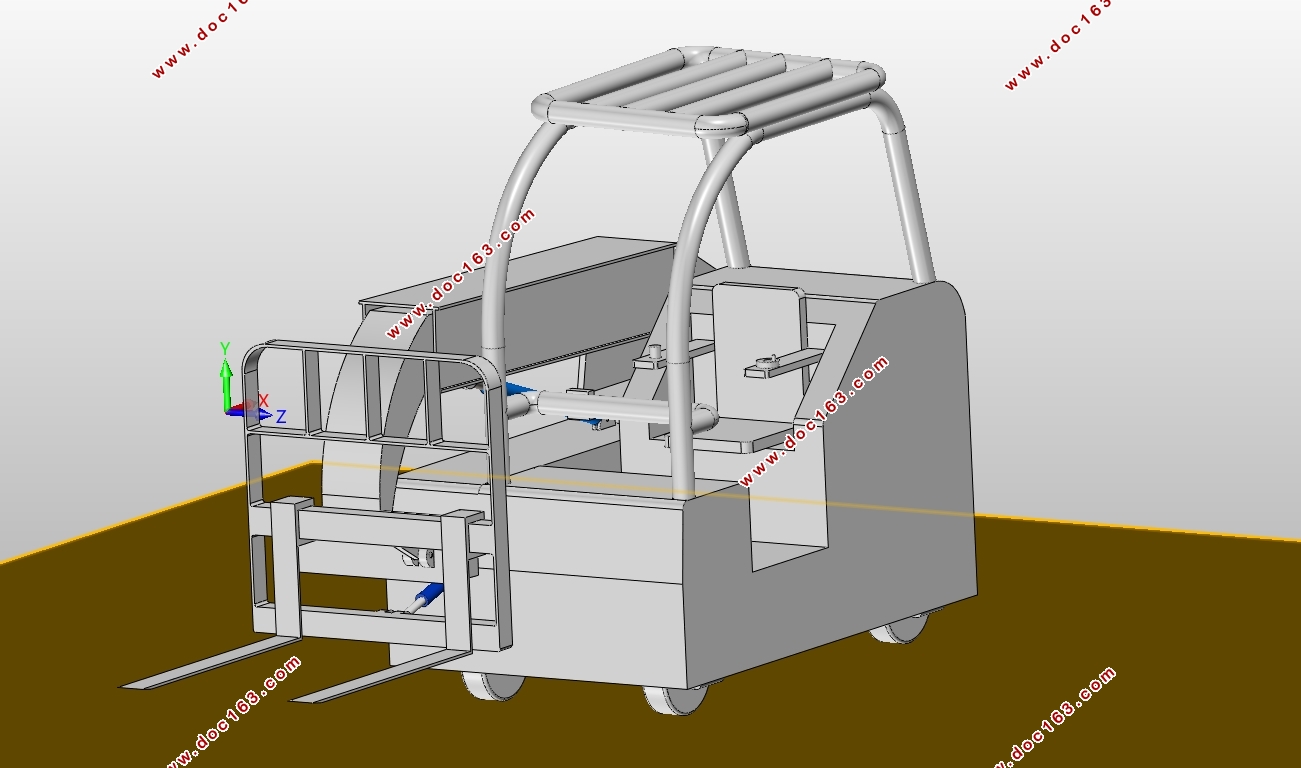
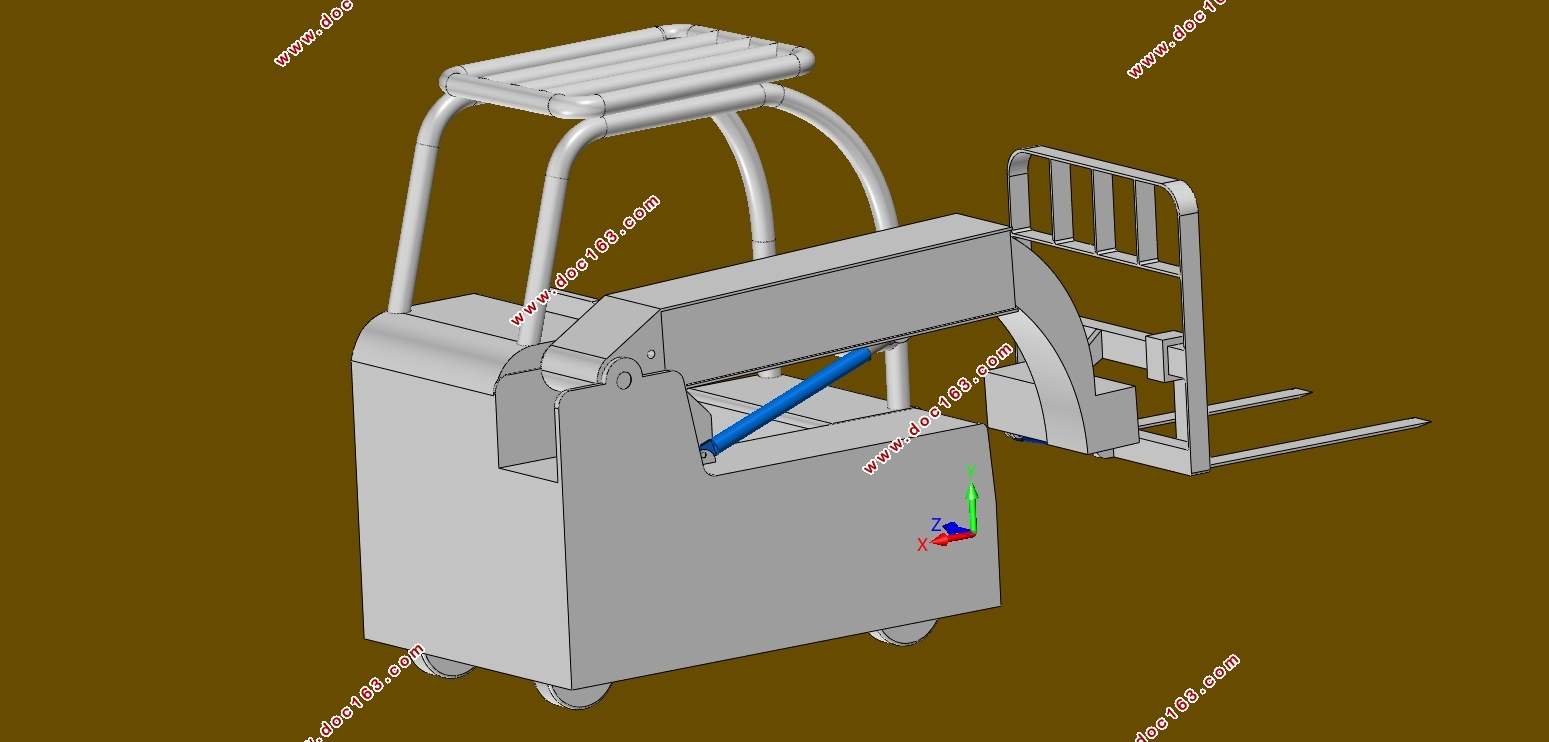
(4)运用SolidWorks软件完成对伸缩臂叉车的三维建模和仿真,检验整机设计的合理性。
本文研究结果表明所设计的伸缩臂叉车具有良好的工作能力,伸缩臂的变幅角度、举升高度和工作范围达到设计要求,并且具有较强的安全性,整体的性能指标具有一定的先进性,达到了预期目标。 [资料来源:http://doc163.com]
关键词:伸缩臂式叉车;臂架结构;调平机构;有限元分析
Abstract
This article designs the telescopic arm forklift, referring to foreign similar products and considering the market demand. Taking into account the telescopic forklift truck must achieve a larger range of amplitude and lift height, and must have a strong ability to work and security in a variety of complex environments. And striving to achieve the performance of foreign products.On this basis, the overall design of the telescopic forklift and the design of the working device are studied.
The main contents of this paper are as follows:
(1) Introduce the main purpose of the telescopic arm forklift truck and the development status of the telescopic arm forklift truck at home and abroad.
(2) Complete overall designofthe telescopic forklift truck, and select main partofthe telescopic forklift truck. Check the performance of telescopic arm forklift, including traction performance, maneuverability, braking performance and stability.
(3) Design the boom structure of the telescopic arm forklift, including Leveling mechanism, hydraulic cylinder, support device, etc. Check the arm frame strength, stiffness and stability. And do finite element analysis of telescopic armswith ANSYS.
(4) Complete three-dimensional modeling of the telescopic arm forklift with SolidWorks, observe the rationality of the whole design.
The results of this study show that the design of the telescopic forklift has a good ability to work, amplitude angle, lift height and working range of the telescopic arm meet the design requirements, and has a strong security, the overall performance indicators have a certain degree of advanced.The results of the study indicate that the target has been met.
Key words: telescopic arm forklift; boom structure; leveling mechanism; finite element analysis
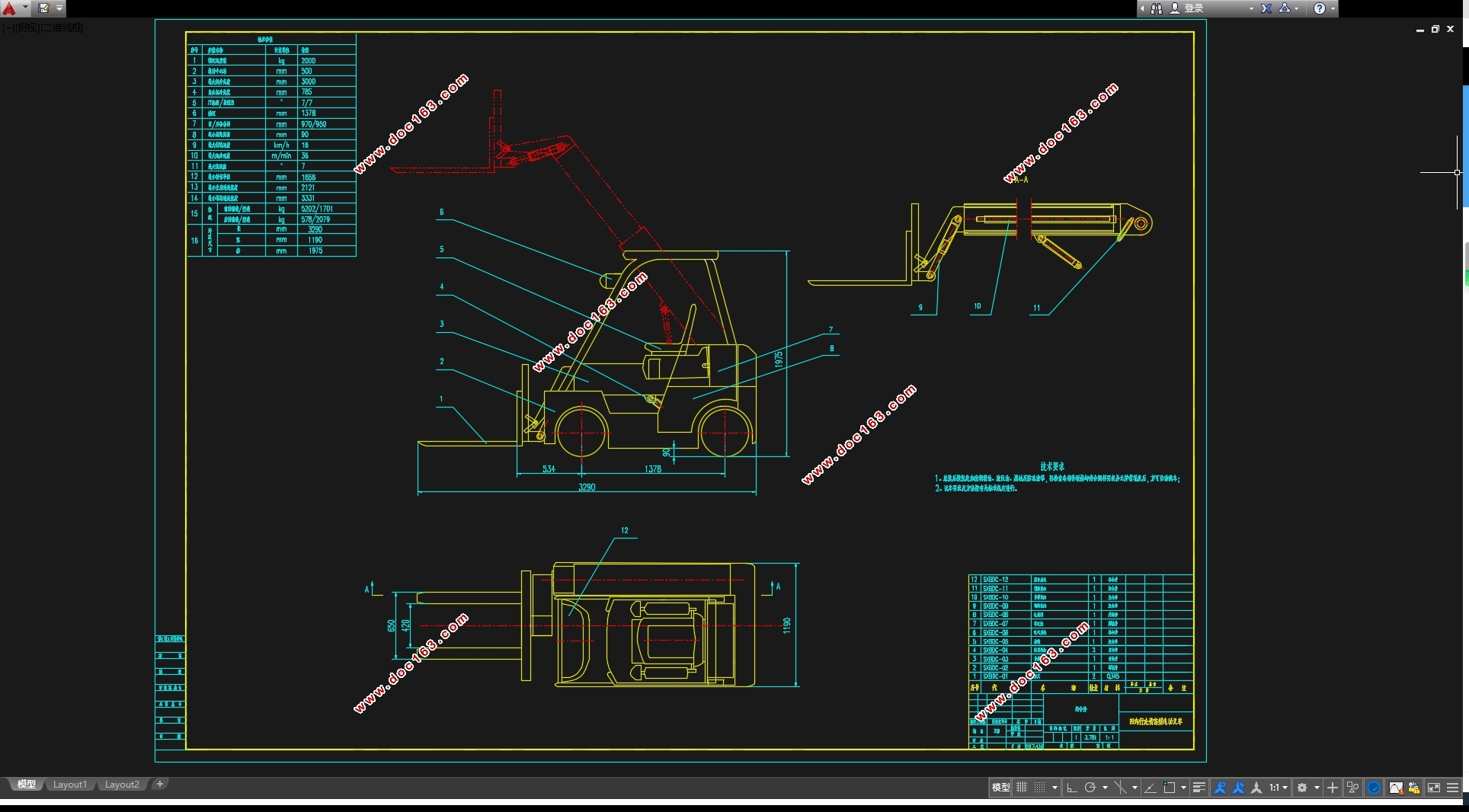
该型伸缩臂叉车的设计参数如下:
额定起重量(kg) 2000
载荷中心距(mm) 500
最大起升高度(mm) 3000 [来源:http://www.doc163.com]
最大起升速度(m/s)(满载/空载) 0.4/0.6
最大运行速度(km/h)(满载/空载) 16/16
最大爬坡度(%)(满载/空载) 5/7
最小离地间隙(mm) 90
轴距(mm) 1378
节臂数目 2
工作条件 硬路面


目录
摘要 I
Abstract II
第1章绪论 1
1.1 课题研究背景和意义 1
1.2 国内外伸缩臂叉车的发展现状 2
1.2.1 国外研究现状 2 [资料来源:http://doc163.com]
1.2.2 国内研究现状 3
1.3 课题研究内容 4
第2章伸缩臂电动叉车总体设计计算 6
2.1 设计参数 6
2.2 确定伸缩臂电动叉车各部分构成 6
2.2.1 牵引传动系统 6
2.2.2 制动系统 7
2.2.3 转向系统 8
2.2.4 行走支承系统 8
2.2.5 工作装置 9
2.3 整车自重和重心位置估算及轴压计算 10
2.3.1 计算整车自重及重心位置 10
2.3.2 轴压计算 10
2.3.3 选择轮胎 11
2.4 牵引力性能计算 11
2.4.1 行驶功率计算 11
2.4.2 电机选择 11
2.4.3 减速器总传动比的确定 12
2.4.4 爬坡能力验算 12
2.5 稳定性计算 13
2.5.1 满载堆垛时纵向稳定性 14
2.5.2 满载运行时纵向稳定性 15 [资料来源:http://Doc163.com]
2.5.3 满载堆垛时横向稳定性 15
2.5.4 空载运行时横向稳定性 16
2.6 机动性参数确定 17
2.6.1 最小转弯半径 17
2.6.2 直角通道理论宽度 18
2.6.3 堆垛通道最小宽度 18
2.7 制动性能计算 19
2.8 本章小结 20
第3章伸缩臂叉车工作装置设计 21
3.1 臂架系统设计 21
3.1.1 伸缩臂结构介绍 21
3.1.2 臂架系统动作机构 22
3.2 伸缩臂叉车平动机构设计 23
3.2.1 平动油缸设计 24
3.2.2 辅助油缸设计 26
3.2.3 货叉的设计 27
3.3 变幅机构设计 28
3.3.1 变幅机构的设计要求 28
3.3.2 变幅油缸设计 28
3.4 伸缩臂结构的计算 29
3.4.1 伸缩臂强度计算 29
[资料来源:http://www.doc163.com]
3.4.2 伸缩臂刚度计算 34
3.4.3 伸缩臂危险截面验算 35
3.5 本章小结 36
第4章伸缩臂的有限元分析及仿真 37
4.1 有限元分析 37
4.1.1 建立三维模型 37
4.1.2 划分网格 37
4.1.3 施加载荷和约束 38
4.1.4 分析结果 38
4.2 伸缩臂叉车三维建模与仿真 39
4.3 本章小结 42
第5章总结与展望 43
5.1 全文总结 43
5.2 经济性分析 43
5.3 环境影响分析 44
5.4 展望 44
参考文献 45
致谢 46 [资料来源:Doc163.com]
上一篇:臂架型电动叉车设计研究(含CAD图,SolidWorks三维图)
下一篇:液压变压驱动器设计(含CAD图,SolidWorks三维图)