
臂架型电动叉车设计研究(含CAD图,SolidWorks三维图)

臂架型电动叉车设计研究(含CAD图,SolidWorks三维图)(任务书,开题报告,外文翻译,文献摘要,论文说明书21000字,CAD图1张,SolidWorks三维图)
摘 要
近年来,物流行业取得了较快的发展。叉车是减轻劳动者工作强度的主要工具之一,发展迅速,其操纵简单灵活、适用面较为广泛而被大量应用于物流运输工作中。叉车的机动灵活性和驾驶员视野的完整性是衡量叉车性能的重要指标。目前国内叉车大多为后轮转向,转弯半径较大,在一些狭窄的空间内难以灵活操作,且工作装置多为门架,起升货物时影响驾驶员的视野。如何提高叉车的机动性,保证驾驶员视野的完整性,是目前国内叉车重要的研究课题。
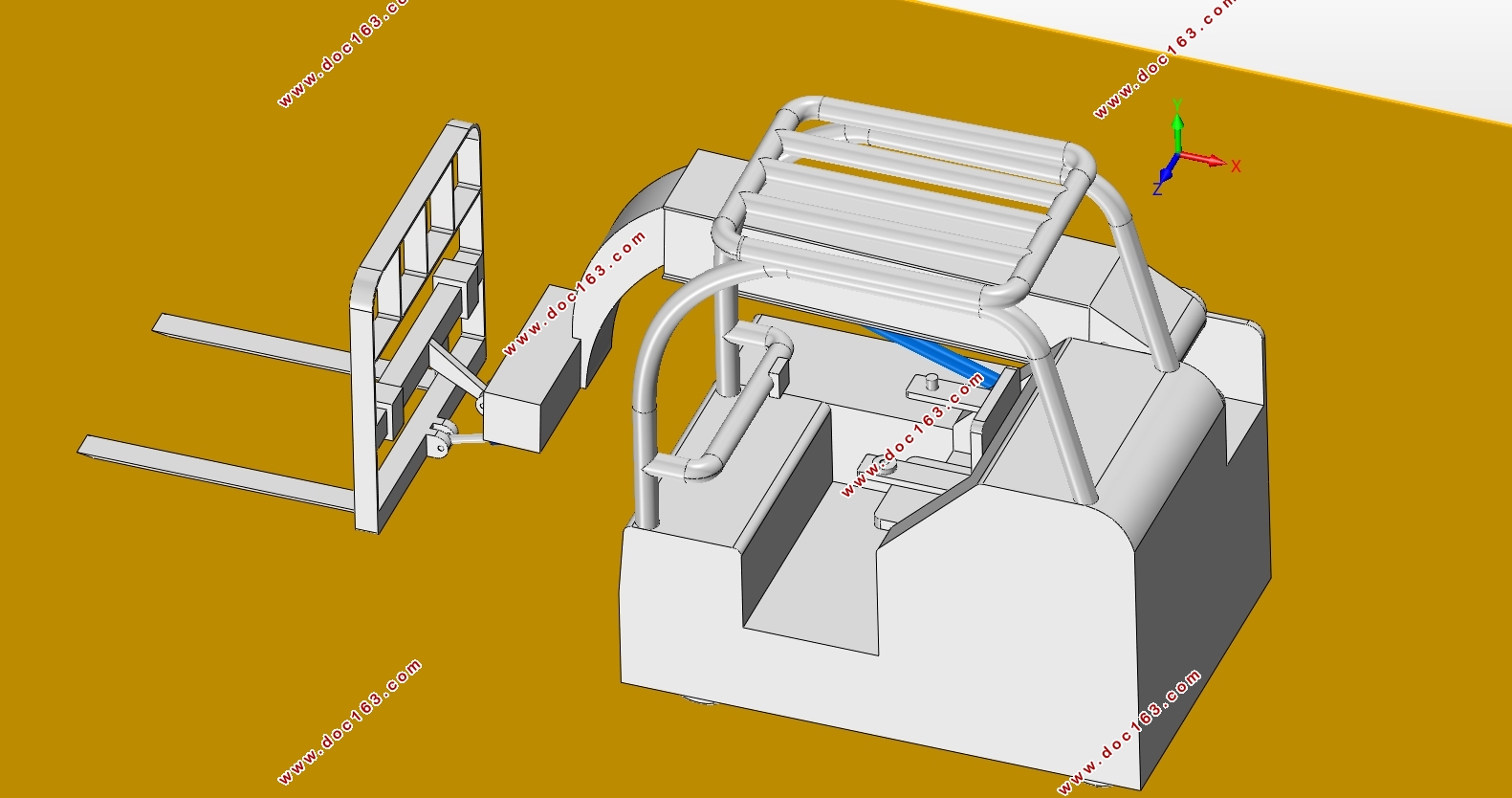
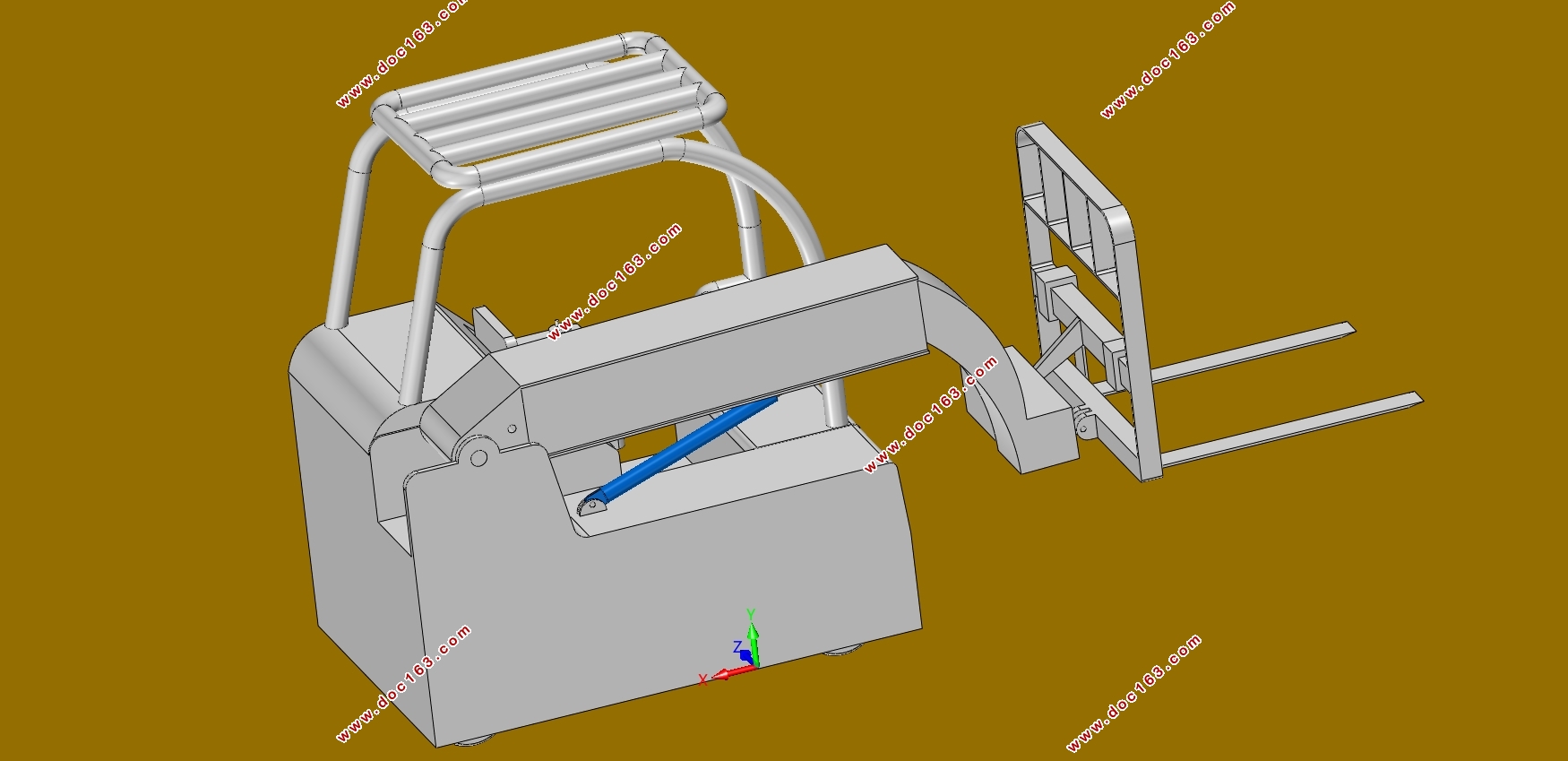
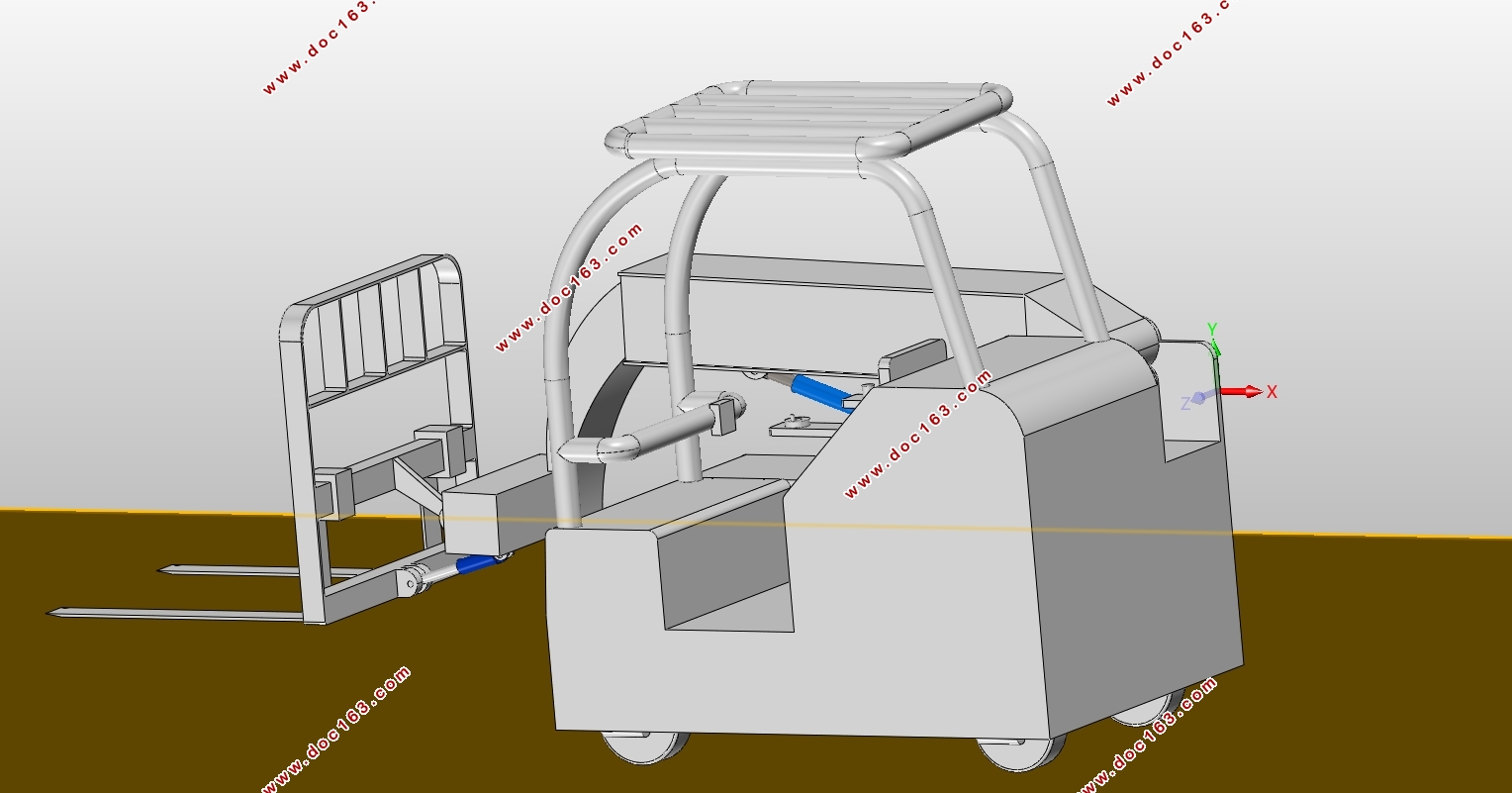
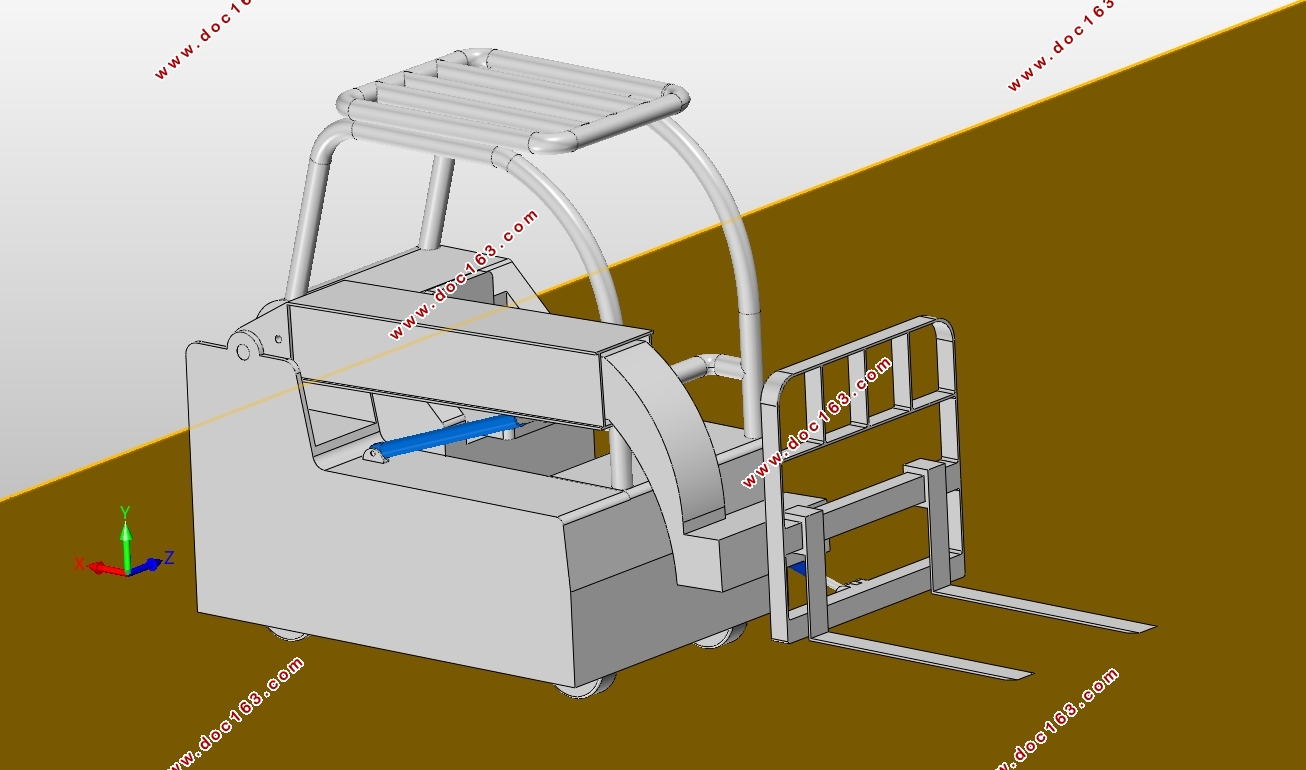
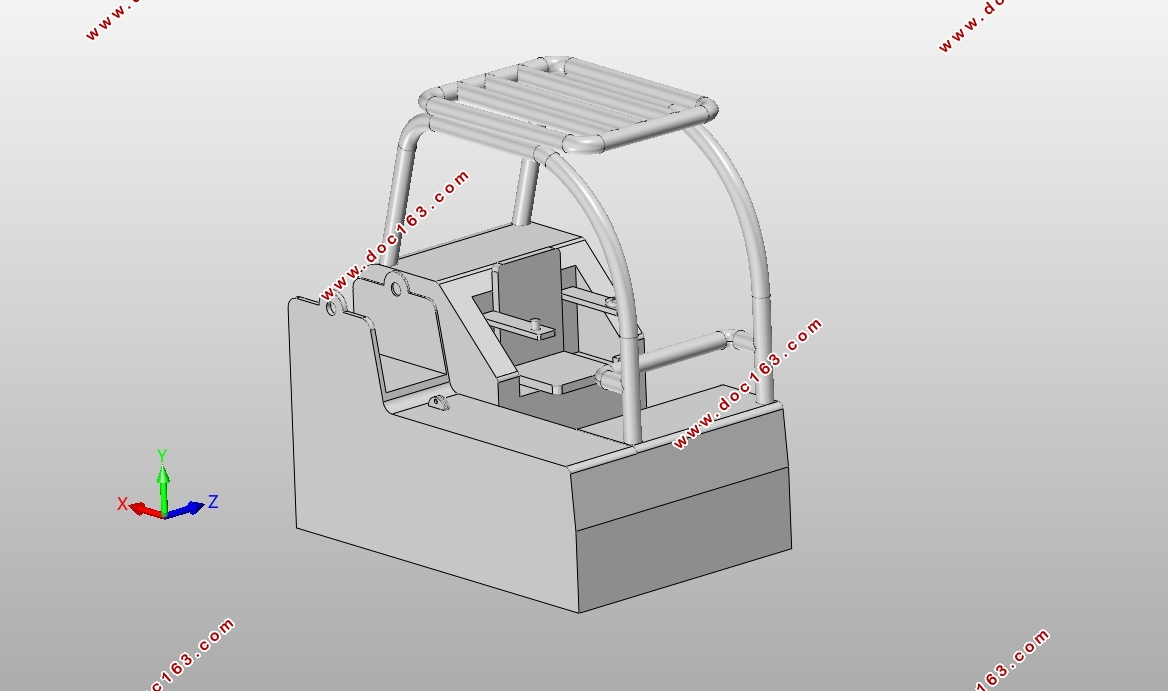
本文对臂架型叉车进行了研究,该叉车工作装置为安装在叉车侧边的伸缩臂架,能够保证驾驶员具有较好的视野;该叉车为全向行驶叉车,叉车的车轮为驱动全向轮,转向方式为四轮转向,并设置三种运行模式,使叉车能够实现横行、斜行、原地回转等,能够提高叉车的机动灵活性。本文工作的主要内容有:
(1)完成臂架型叉车的总体设计,包括各个构件的选型,叉车牵引性能、制动性能、机动性的计算和稳定性的验算,并完成了总体方案图的绘制。
(2)完成叉车转向系统的设计,包括对驱动全向轮的选择,转向方式和运行方式的确定,实现叉车的全向行驶。 [资料来源:http://doc163.com]
(3)完成叉车的建模、仿真与动力学分析。
关键词:伸缩臂架;叉车;全向行驶;建模;仿真;动力学分析
Abstract
In recent years, the logistics industry has made rapid development. Forklift is one of the main tools to reduce the intensity of the work of workers, which has made rapid development. And it is used widely in logistics and transport work for its simple and flexible operation, the application of a wide range . The flexibility of the forklift and the integrity of the driver's vision are important indicators of forklift performance. At present, most of the domestic forklift is equipped with the rear wheel steering system. The turning radius is long and it is difficult to be operated flexibly in some narrow space. because the work of the device is the mast, it will affect the driver's vision when lifting the goods. How to improve the mobility of forklifts and ensure the integrity of the driver's vision are the current domestic forklift important research topics. [来源:http://www.doc163.com]
This paper gives a certain study for the forklift . The forklift working device is installed in the forklift side of the telescopic boom, to ensure that the driver has a better vision; and the forklift is the Omni-directional forklift, whose wheels are driving Omni-directional wheel, steering mode is the four-wheel steering. It sets three operating modes, so that the forklift can achieve straight driving 、transverse, oblique, pivot turn in the case of stationary vehicle body, which can improve the flexibility of the forklift. The main contents of this paper are as follows:
(1) completing the overall design of the forklift, including the selection of various components, forklift traction performance, braking performance, stability, maneuverability calculation and drawing of the total map.
(2) completing the forklift steering system design, including the choice of Omni-directional wheel , steering mode and operating modes , so that the implementation of all-round forklift.
(3) completing the forklift modeling, simulation and dynamics analysis.
Key words: Telescopic boom; forklift; Omni-directional driving; modeling; simulation; dynamic analysis
2.1 设计参数
额定起重量(kg) 2000
载荷中心距(mm) 500
最大起升高度(mm) 3000
最大起升速度(m/s)(满载/空载) 0.4/0.6
最大运行速度(km/h)(满载/空载) 16
最大爬坡度(%)(满载/空载) 5/7
最小离地间隙(mm) 90
轴距(mm) 1378
节臂数目 2
[来源:http://www.doc163.com]
[资料来源:www.doc163.com]

目 录
摘 要 I [资料来源:www.doc163.com]
Abstract II
第一章 绪论 1
1.1 课题研究的目的与意义 1
1.2 叉车技术的国内外发展现状 2
1.2.1 国外叉车技术的发展现状 2
1.2.2 国内叉车技术的发展现状 3
1.3 课题研究的主要内容 4
第二章 电动叉车总体设计计算 6
2.1 设计参数 6
2.2 确定叉车各总成构造形式 6
2.2.1 传动系统 6
2.2.2 制动系统 7
2.2.3 转向系统 8
2.2.4 行走支承系统 9
2.2.5 工作装置 10
2.3 整车自重和重心位置估算及轴压计算 11
2.3.1 计算整车自重及重心位置 11
2.3.2 轴压计算 11
2.4 牵引性能计算 12
2.4.1 行驶功率计算 12
2.4.2 电机选择 12
2.4.3 减速器总传动比的确定 13 [资料来源:https://www.doc163.com]
2.4.4 爬坡能力验算 13
2.5 制动性能计算 14
2.6 稳定性计算 15
2.6.1 满载堆垛时纵向稳定性 15
2.6.2 满载运行时纵向稳定性 16
2.6.3 满载堆垛时横向稳定性 17
2.6.4 空载运行时横向稳定性 18
2.7 机动性参数确定 18
2.7.1最小转弯半径 19
2.7.2 直角通道最小宽度 19
2.7.3 堆垛通道最小宽度 20
2.8 转向系统计算 20
2.8.1 转向阻力矩计算 20
2.8.2 转向电机的选择 21
2.8.3 传动比的计算 21
2.9 本章小结 22
第三章 臂架型叉车行走转向系统设计 23
3.1 行走支承装置 23
3.2 车轮选择 23
3.2.1 全向轮的种类及选择 24
3.2.2 车轮构造及尺寸 26
[资料来源:www.doc163.com]
3.3 转向系统 27
3.3.1 转向方式 27
3.3.2 运行型式 28
3.4 转向控制系统 34
3.5 本章小结 34
第四章 臂架型叉车的建模、仿真与动力学分析 35
4.1 臂架型叉车的建模与仿真 35
4.1.1 SolidWorks软件介绍 35
4.1.2 臂架型叉车各零件模型的建立与装配 35
4.1.3 臂架型叉车的仿真 37
4.2 臂架型叉车的动力学分析 40
4.2.1 Adams软件介绍 40
4.2.2 基于Adams的臂架型叉车的动力学分析 40
4.3 本章小结 44
第五章 总结及展望 45
5.1 总结 45
5.2 经济性分析 45
5.3 环境影响分析 46
5.4 展望 46
致 谢 47
参考文献 48
上一篇:一种变型折叠桌的参数化设计(含SolidWorks三维图)
下一篇:臂架型电动叉车工作装置设计研究(含CAD图,SolidWorks三维图)