
数控机床上下料机械手设计(PLC)(含CAD零件图装配图)

数控机床上下料机械手设计(PLC)(含CAD零件图装配图)(任务书,论文说明书20000字,CAD图纸7张)
摘 要
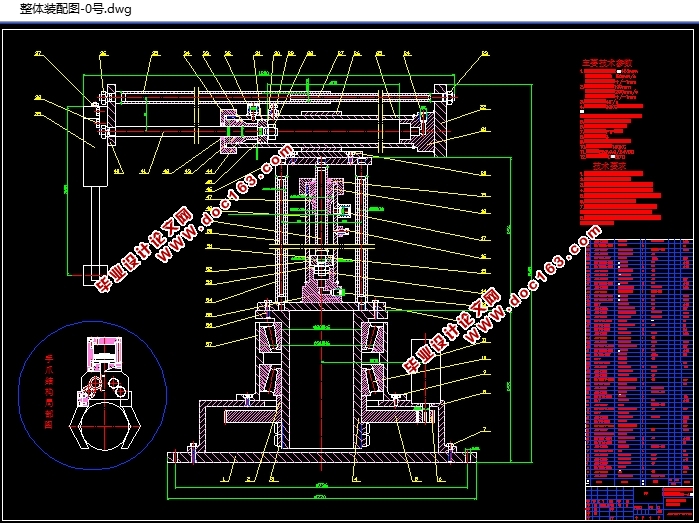
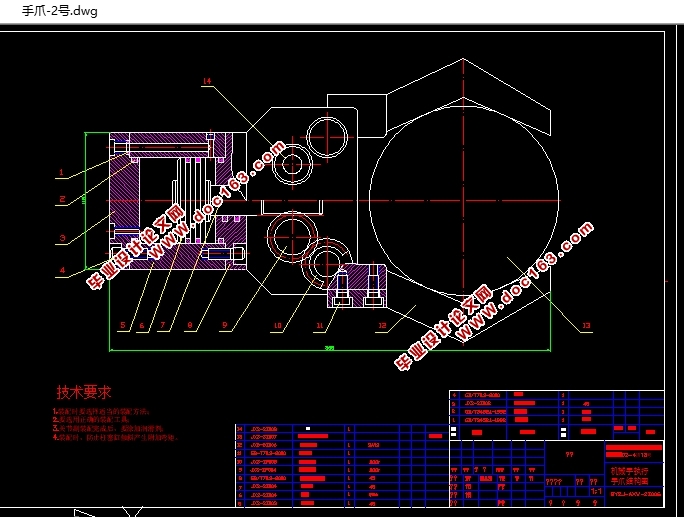
通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计,机械手腕部的结构设计,末端执行器(手爪)的结构设计,机械手的机械传动机构的设计,机械手驱动系统的设计。同时对液压系统和控制系统进行了理论分析和计算。基于PLC对机械手的控制系统进行了深入细致的设计,通过对机械手作业的工艺过程和控制要求的分析,设计了控制系统的硬件电路,同时编制了机械手的控制程序。设计达到了设计的预期目标。
关键词:机械手;PLC;液压伺服定位;电液系统
该方案是数控机床上下料机械手设计,设计要求搬运的加工工件的质量达30KG,且长度达500MM,同时考虑到数控机床布局的具体形式及对机械手的具体要求,考虑在满足系统工艺要求的前提下,尽量简化结构,以减小成本、提高可靠度。该机械手在工作中需要3种运动,其中手臂的伸缩和立柱升降为两个直线运动,另一个为手臂的回转运动,综合考虑,机械手自由度数目取为3,坐标形式选择圆柱坐标形式,即一个转动自由度两个移动自由度,其特点是:结构比较简单,手臂运动范围大,且有较高的定位准确度。
[来源:http://Doc163.com]
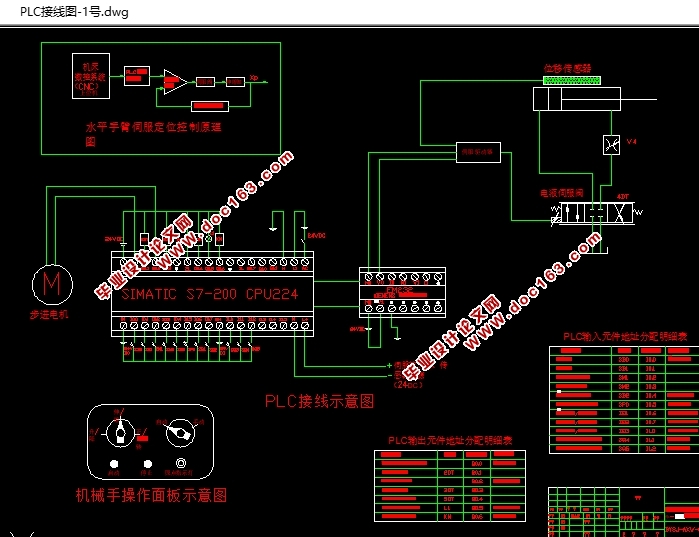
机械手工艺过程与控制要求:机械手的动作有水平手臂的伸缩,垂直手臂的升降,执行手爪的加紧与松开以及腰部的旋转。其中,垂直升降和水平伸缩有液压实现驱动。而液压缸又由相应的电磁阀控制。其中,升降分别由双线圈的两位电磁阀控制,例如,当下降电磁阀通电时,机械手下降;当下降电磁阀断电时,机械手下降停止。只有当上升电磁阀通电时,机械手才上升;而当上升电磁阀断电时,机械手上升停止。而水平方向的伸缩主要由电液伺服阀、伺服驱动器、感应式位移传感器构成的回路进行调节控制。而执行手爪的加紧与放松,通过柱塞缸与齿轮来实现。柱塞缸由单线圈的电磁阀(夹紧电磁阀)来控制,当线圈不通电时,柱塞缸不工作,当线圈通电时,柱塞缸工作冲程,手爪张开,柱塞缸工作回程,手爪闭合。
当机械手旋转到机床上方时并准备下降进行上下料工作时,为了确保安全,必须在机床停止工作并发出上下料命令时,才允许机械手下降进行作业。同时,从工件料架上抓取工件时,也要先判断料架上有无工件可取。
[资料来源:www.doc163.com]

 [资料来源:Doc163.com]
[资料来源:Doc163.com] 

目 录
摘要 Ⅰ
Abstract Ⅱ
第1章 绪论 1
1.1 选题背景 1
1.2 设计目的 1
1.3 国内外研究现状和趋势 2
1.4 设计原则 3
第2章 设计方案的论证 3
2.1机械手的总体设计 3
2.1.1 机械手总体结构的类型 3
2.1.2 设计具体采用方案 4
2.2机械手腰座结构的设计 5
2.2.1 机械手腰座结构的设计要求 5
2.2.2 设计具体采用方案 6
2.3机械手手臂结构的设计 7
2.3.1 机械手手臂的设计要求 7
2.3.2 设计具体采用方案 8
2.4工业机器人腕部的结构 9
2.4.1机器人手腕结构的设计要求 9
2.4.2设计具体采用方案 10
2.5机械手末端执行器(手爪)的结构设计 10
2.5.1机械手末端执行器的设计要求 11
2.5.2 机器人夹持器的运动和驱动方式 12
2.5.3机器人夹持器的典型结构 12
2.5.4设计具体采用方案 13
2.6机械手的机械传动机构的设计 13
2.6.1工业机器人传动机构设计应注意的问题 14
2.6.2工业机器人常用的传动机构形式 15
2.6.3 设计具体采用方案 18
2.7机械手驱动系统的设计 18
2.7.1机器人各类驱动系统的特点 18 [来源:http://www.doc163.com]
2.7.2工业机器人驱动系统的选择原则 19
2.7.3机器人液压驱动系统 20
2.7.4机器人气动驱动系统 21
2.7.5 机器人电动驱动系统 23
2.7.6 设计具体采用方案 25
2.8机器人手臂的平衡机构设计 26
2.8.1 机器人平衡机构的形式 26
2.8.2 设计具体采用的方案 26
第3章 理论分析和设计计算 27
3.1液压传动系统设计计算 27
3.1.1 确定液压系统基本方案 27
3.1.2 拟定液压执行元件运动控制回路 28
3.1.3 液压源系统的设计 28
3.1.4 绘制液压系统图 29
3.1.5确定液压系统的主要参数 30
3.1.6 计算和选择液压元件 35
3.1.7 液压系统性能的验算 37
3.2电机选型有关参数计算 37
3.2.1 有关参数的计算 37
3.2.2 电机型号的选择 40
第4章 机械手控制系统的设计 41
4.1机械手控制系统硬件设计 41
4.1.1 机械手工艺过程与控制要求 41
4.1.2 机械手的作业流程 42
4.1.3 机械手操作面板布置 43
4.1.4 控制器的选型 45
4.1.5 控制系统原理分析 45
4.1.6 PLC外部接线设计 46
4.1.7 I/O地址分配 47
4.2机械手控制系统软件设计 49
4.2.1机械手控制主程序流程图 49
4.2.2机械手控制程序设计 49
技术经济分析 51
结论 52
专题部分 53
参考文献 64
附录1 66
附录2 71
附录3 78
致谢 94 [资料来源:www.doc163.com]