
林业火情探测四轴飞行器结构设计(含CAD零件装配图)
林业火情探测四轴飞行器结构设计(含CAD零件装配图)(论文说明书19000字,CAD图纸12张)
THE STRUCTURE DESIGN OF THE FOUR-AXIS AIRCRAFT FOR FOREST FIRE DETECTION
摘要
四轴飞行器目前属于火热的可垂直起落的飞行器,具有结构简单、动力强大、可用的行业范围大并且飞行时可靠性高,各种专业程度高的飞行器被各行各业所喜爱,因此,主流研究其专业化越来越密切。本文所设的无人机乃用于观察森林里的火情,是专行专业使用的。
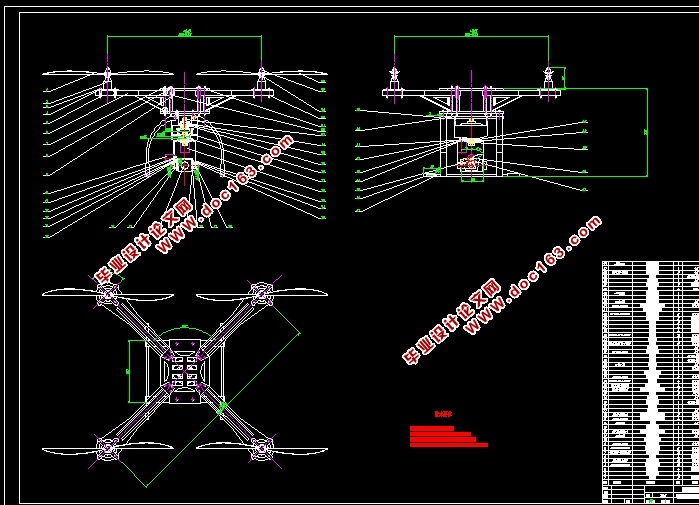
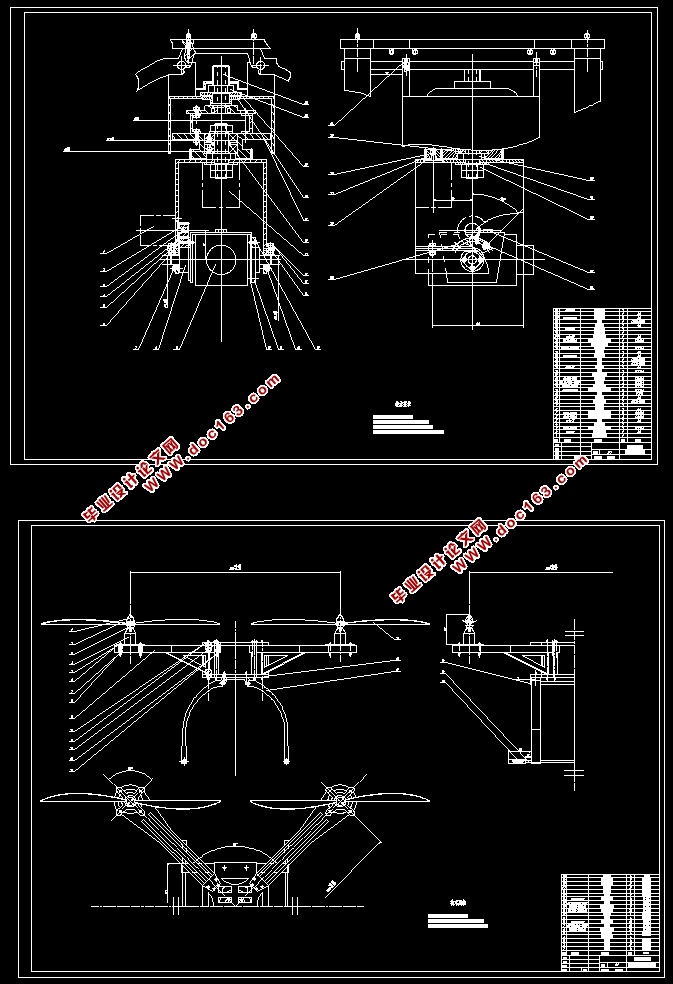
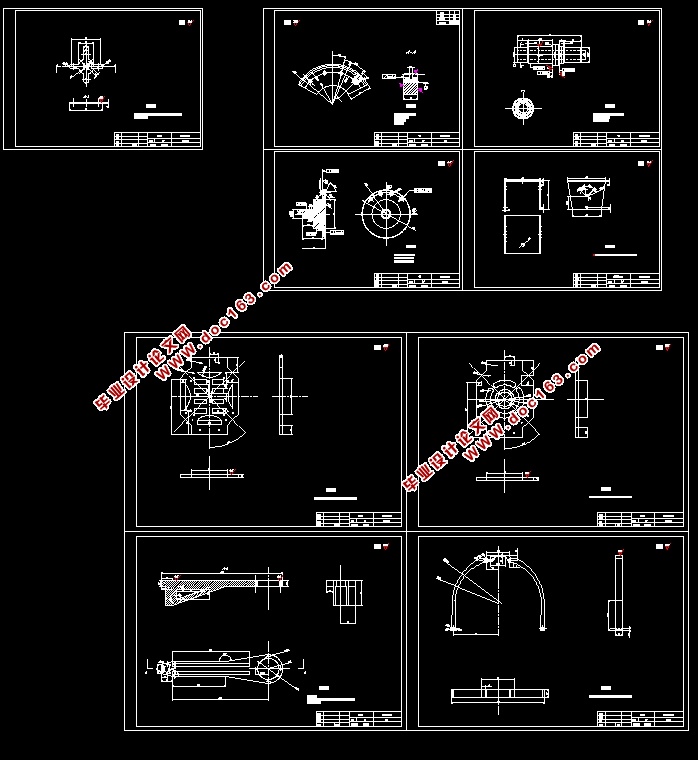
本文对四轴飞行器的机构与原理先行分析,主要是设计四轴飞行器的结构部分,通过对机架里的主板、力臂与起落架等机械结构设计,选择合理的碳纤维复合材料来构造机架,通过三维软件来建模,组成一个四轴飞行器的机架,对于云台机械结构的设计分析,利用齿轮减速机构来细分转动角度,通过支架来支撑摄像机。
叙述了森林火情探测的四轴飞行器的设计过程,从动力部分、结构部分到控制部分。
关键词 四轴;飞行器;结构设计;碳纤维;机架;云台
Abstract
Four aircraft at present belongs to the hot axis can be vertical take-off and landing aircraft, has the advantages of simple structure, power strong, the available industry when flying range and high reliability, high degree of professional aircraft is enjoyed by all walks of life, therefore, the mainstream study its specialization is more and more closely. The uav used in this paper is used to observe the fire in the forest.
[资料来源:http://Doc163.com]
Four axis in this paper, the analysis of the mechanism and principle of aircraft, mainly design of aircraft structure parts, four axis through the frame in the motherboard, lever and the landing gear and other mechanical structure design, selecting rational carbon fiber composite materials to construct the frame, through 3 d software modeling, composed of a vehicle frame, four axis for head machinery design and analysis of the structure, gear reduction mechanism is used to segment the rotation Angle, through a bracket to support the camera.
This paper describes the design process of the four-axis aircraft in forest fire detection, from the power part, the structure part to the control part.
Keywords our-axis aircraft structural design carbon fiber rack head
本文主要是研究设计用于森林火情探测的四轴飞行器,此四轴飞行器能帮助消防员快速探查森林里的火源,并且它能够在安全区域对火灾现场进行实时监控。 携带的相机设备让消防队更清晰观测火势蔓延路径,并评估可能出现危险的区域,指挥者可因这个来提前布局,以应对火情的蔓延,能够使其的决策更加有效率。可以通过携带的相应设备,让消防员可通过红外图像识别浓烟中隐藏的热点及火源。四轴飞行器的使用,让消防队能更细致的监控现场环境,得到更多的信息。科技让消防员及时获取火场关键信息,并在最短时间内做出判断。通过对四轴飞行器的基本参数先行确定,再根据这个了选择确定电机的型号与大小。动力系统的确定,再根据这个来设计四轴飞行器的机架结构,通过三维软件来建模,来展示四轴飞行器的具体外形和结构。云台的结构设计,其可以二轴转动,水平方向与垂直方向转动,使得探测范围灵活与变通。云台与摄像设备的搭配使的能够大范围的观察火情,再选择优秀可靠的控制系统里的部件,为了给无人机装上灵魂与核心。这些东西能够组成一个完整的四轴飞行器,并且能够完成设计时的目的。 [资料来源:https://www.doc163.com]
本论文共分为六章,每个章的安排如下:
第一章:课题研究的背景与意义和四轴飞行器的发展状况以及结构形式与飞行原理
第二章:四轴飞行器的动力系统的设计,内部模块的选型
第三章:四轴飞行器的机架结构的设计,内部各零件的设计
第四章:四轴飞行器的云台结构的设计,内部各零件的设计
第五章:四轴飞行器的控制系统的设计,内部模块的选型
第六章:总结
四轴飞行器的飞行原理
四轴飞行器的飞行原理,是用改变电机速度从而来改变螺旋桨的拉力,这样便容易控制四轴飞行器的飞行姿态。因为飞行器的起落变化是通过螺旋桨的速度的改变,这样就让它的动力温和,不会发生转折,这样便需要长久的控制法。四轴飞行器是一个在空间具有6个活动自由度(分别沿3个坐标轴作平移和旋转动作),但是只有4个控制自由度(四个电机的转速)的系统,因此被称为欠驱动系统(只有当控制自由度等于活动自由度的时候才是完整驱动系统)。不过对于姿态控制本身(分别沿3个坐标轴作旋转动作),它确实是完整驱动的。
四轴飞行器的飞行状态如下种类,如图2.2所示的飞行状态图。
1.上下飞行 通过电机电流的加大,同步提高四个螺旋桨的升力,四轴飞行器就会向上飞行;相反来说,四轴飞行器就会向下飞行。
[来源:http://Doc163.com]
2.前后飞行 通过改变四轴飞行器的仰俯角度,一旦四轴飞行器朝前面倾斜,那么重力与升力相互抵掉消除于垂直方向的分量。
3.左右飞行 通过改变四轴飞行器的滚转角度,一旦四轴飞行器朝左右倾斜,那么重力与升力相互抵掉消除于垂直方向的分量。
4.仰俯飞行 四轴飞行器按自己的y轴转动,飞行器在低头飞行时,它的无刷电机1与2会降低自己的速度,在这个时候,电机3与4就会提高自己的速度,在这个情况下,四个螺旋桨的升力带来的反扭矩之间依旧在它们之间抵掉消除。
5.滚动飞行 四轴飞行器按自己的x轴转动,飞行器在滚动飞行时,它的无刷电机3与4会降低自己的速度,在这个时候,电机1与2就会提高自己的速度,在这个情况下,四个螺旋桨的升力带来的反扭矩之间依旧在它们之间抵掉消除。
6.偏航飞行 四轴飞行器按照自己的z轴转动,一旦电机1与3的速度被加大,那么同一时刻电机2与4就要把速度给降低下来。这种情况下螺旋桨提供的升力不会因为这样而抵消它们的反扭矩的,这样就会发生反扭矩的影响,朝顺时针的扭矩就会产生向右偏航。
[资料来源:Doc163.com]
目 录
[资料来源:http://doc163.com]
摘要 I
Abstract II
1 绪论 1
1.1课题研究的背景及意义 1
1.1.1课题研究的背景 1
1.1.2课题研究的意义 1
1.2四轴飞行器的发展的状况 2
1.3本课题的主要研究的问题以及各章安排 5
1.4四轴飞行器的结构形式 5
1.5四轴飞行器的飞行原理 6
2动力系统设计 8
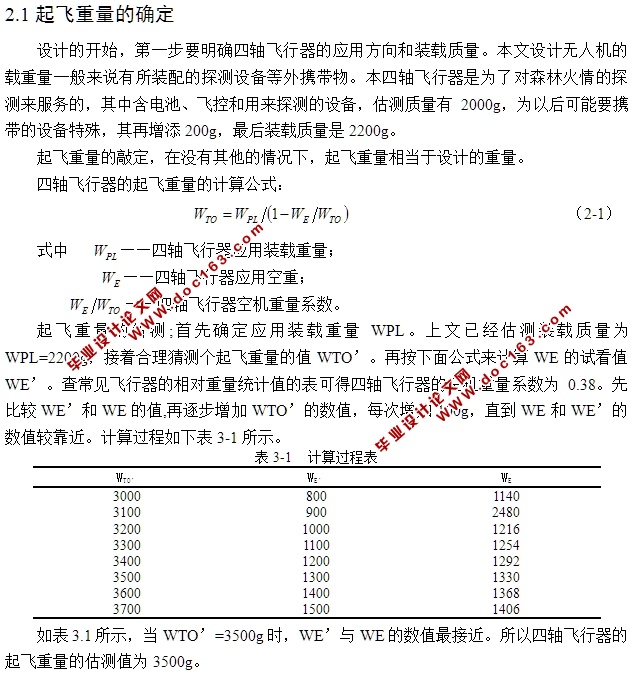
2.1起飞重量的确定 8
2.2电机方案与选择 8
2.3螺旋桨的选择 9
2.4推重比的确定 9
2.5电池的选择 11
2.6电调的选择 12
2.7电池充电器的选择 13
3机架结构设计 14
3.1机架结构的方案与选择 14
3.2机架材料的选择 15
3.3主板的设计 17
3.4力臂的设计 17
3.5起落架的设计 18
3.6电机底座的设计 19
4云台结构设计 21
4.1云台结构的方案与选择 21
4.2减速器设计 21
4.2.1X轴上的减速器设计 21
4.2.2Z轴减速器设计 23
4.3轴的设计 24
4.3.1X轴的设计 24
4.3.2Z轴的设计 24
4.4轴承的选择 25
4.4.1X轴轴承的选择 25
4.4.2Z轴轴承的选择 25
5控制系统设计 26
5.1飞控系统的设计 26
5.2无线数据传输路的设计 29
5.3总体控制系统的设计 30
结论 32
致谢 33
参考文献 34 [资料来源:http://Doc163.com]