
高压输电线巡检机器人机械设计(含CAD图,UG三维图,三维动画)★

高压输电线巡检机器人机械设计(含CAD图,UG三维图,三维动画)★(任务书,中期检查表,论文说明书20800字,CAD图3张,UG三维图,三维动画,答辩PPT)
摘要
随着机器人的研发和应用范围逐渐扩大,将机器人技术使用于高压线的普通检测和修护受到技术学者的学习和研究。巡检机器人在复杂的输电线背景下完成检线任务,要具有自主完成跨越线路上的各种障碍能力。因此,巡检机器人的本体结构决定着巡检机器人的现实功能,也是决定着巡检机器人实用性和便捷性的关键技术之一。
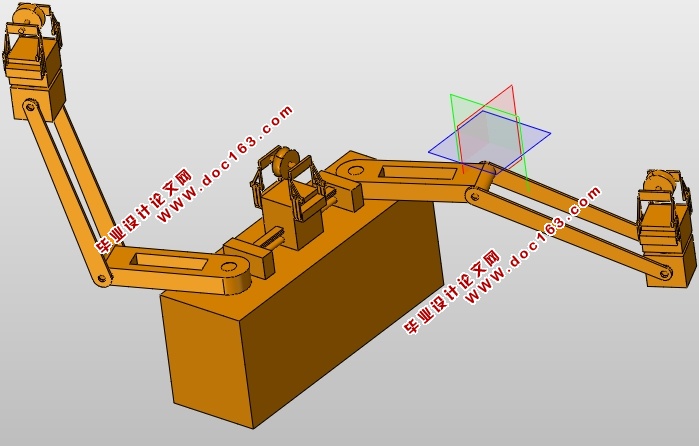
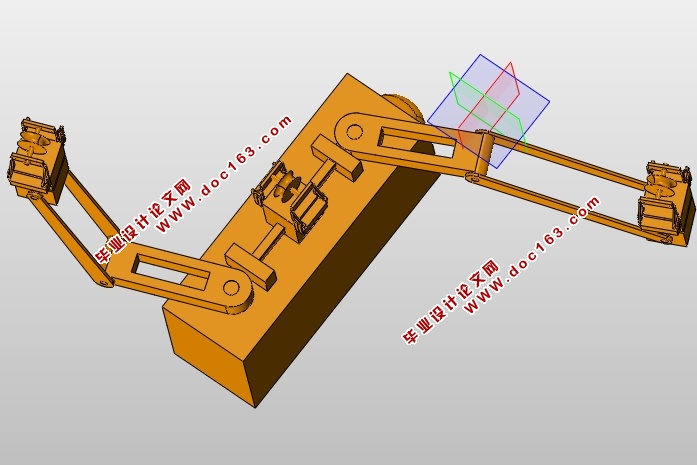
所以本文对国外和国内刊登的巡检机器人的机械结构进行了汇总描述,并在熟悉他们的研究后研究出了创新型的检线机器人的本体结构,本论文以输电线的相线为工作途径,使用三手臂加单独总体箱的形式,机器通过机械臂手轮抓结构悬吊于线路上,可以根据相线的线路实体,选择滚动的轮子为行驶方式或者递进爬行方式实现在线路上移动,遇到线路上的异物时,也可通过三手臂的相互交换运动越过障碍物,继续前行。
本论文采用了双臂在一侧的悬挂是本论文设计的另一特点,因此在工作时可将机器人悬挂于线路一侧,避免了线路上其他的设施对机器人线上作业进行阻扰。本设计所述巡检机器人本体结构较简单明了,容易实施操控和使用,对线路工作的具体实施环境具有很好的能力去适应。 [来源:http://Doc163.com]
关键词:高压输电线;巡检机器人;越障;强度校核;机械手臂;
根据上文的引述,本设计提出了一种新型的机器结构,此机构在地线上行驶,并且可以完成高压输电线上的日常巡检任务,其主要工作分为以下几个方面:
(1)讨论国内外现有的研究成果,并且分析存在的优点和不足,以及论述本次设计的意义和目的。
(2)简述高压输电线路的特点与组成,清晰分析出高压输电线路障碍物的结构类型和特点。并且分析巡检间机器人的工作原理、巡检机器人巡检越障作业特点和设计要求,从而为机器人的本体结构设计做准备。
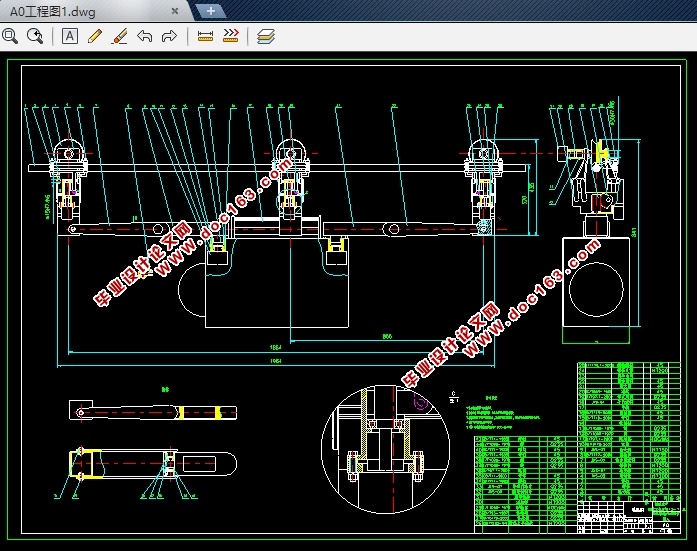
(3)比较现有的设计方案的基础,提出并设计一种新的机器人的机械结构,以适应高压线地线作业环境。从开始的机构简图到具体的运动机构,并清晰讲述此机器人机械机构主要部件的零部件和功能作用。能够利用CAD技术给出机器人的三维实体模型和零件图,并且对机器人巡检作业和越障过程予以规划和分析。
(4)进行巡检机器人主要零部件的静力学分析和强度校核以及其运动学。
(5)整体动画分析并总结当前的主要工作,分析不足,并对进一步的设计工作提出展望。
[资料来源:http://Doc163.com]
 [资料来源:http://doc163.com]
[资料来源:http://doc163.com] 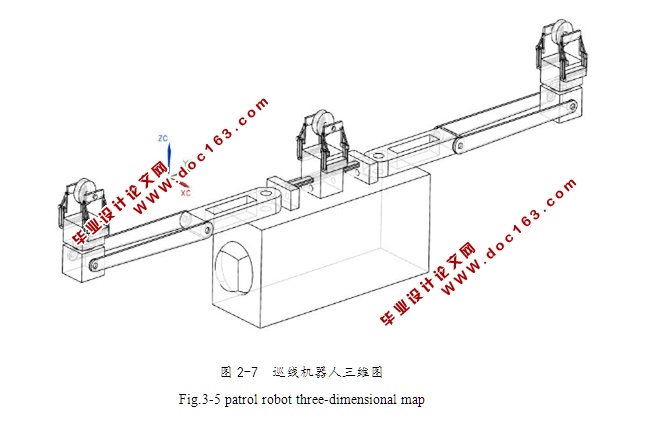

目录
第一章 绪论 1
1.1设计的背景和意义 1
1.2国内外研究现状分析 1
1.3国内的发展状况 4
1.4机器人本体结构需要解决的一些关键问题 6
1.5本文的主要研究内容 7
[资料来源:Doc163.com]
第二章巡检机器人的工作环境和原理分析 7
2.1高压输电线的特点和组成 8
2.1.1高压输电线路的特点 8
2.1.2高压输电线路的组成 8
2.2高压输电线的巡检内容及原理 10
2.3 高压线巡检机器人的设计要求 12
2.4巡检机器人整体设计方案的选择 12
2.5 本章总结 15
第三章 高压线巡检机器人的结构设计 16
3.1巡检机器人整体设计方案的选择 16
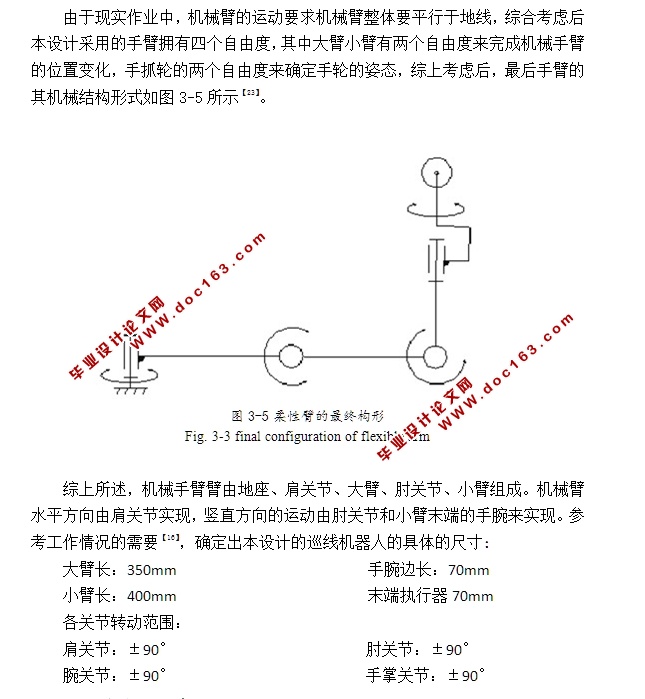
3.2柔性臂 17
3.3驱动部件的选择 19
3.3.1垂直导轨步进电机的计算选型 20
3.4主要部件的设计 21
3.4.1滚轮部分 21
3.4.2中手腕部分 22
3.4.3手掌部分 23
3.4.4大臂部分 23
3.4.5小臂部分 24
3.4.6箱体部分 25
3.4.7轮子开合轴 26 [资料来源:http://www.doc163.com]
3.4.8手腕部分 26
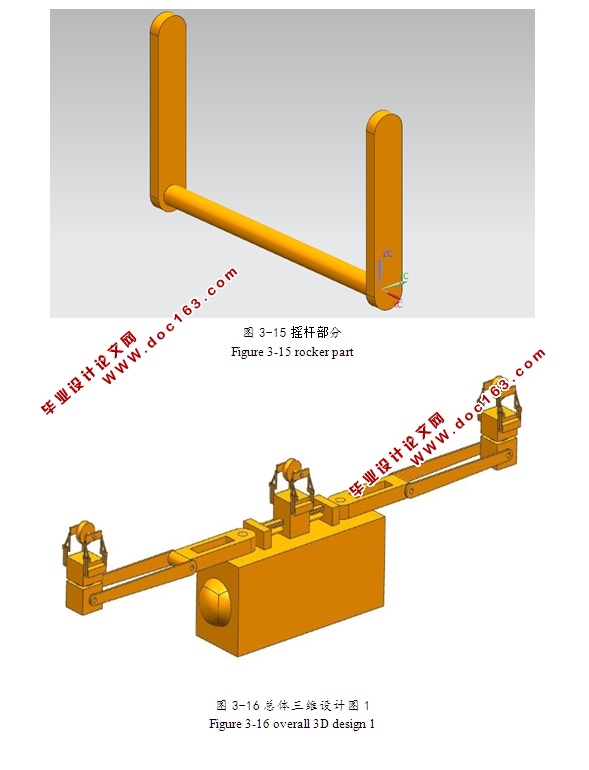
3.4.9摇杆部分 27
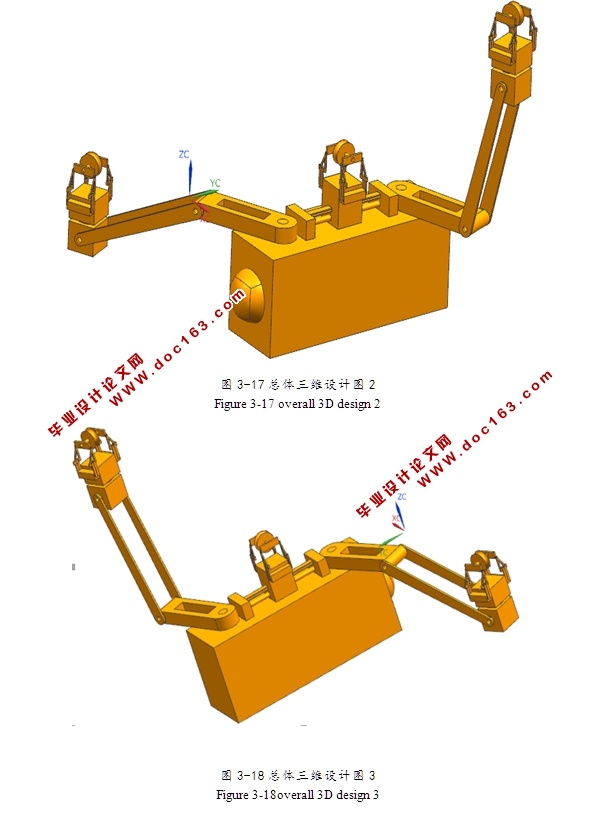
3.5.0总体三维设计图 28
3.6本章总结 30
第四章 高压线巡检机器人运动分析和强度校核 31
4.1巡检机器人沿线爬行的运动分析 31
4.2高压线巡检机器人越障作业的运动分析 31
4.2.1跨越防震锤的运动分析 32
4.2.2定臂转动的运动分析 34
4.3主要零部件的强度校核 36
4.3.1丝杆的强度校核 36
4.3.2齿轮的校核 37
4.3.3大臂的强度校核 39
第五章 总结与展望 41
5.1论文的主要工作和结论 41
5.2展望 41
致谢 43
参考文献 44 [资料来源:http://doc163.com]