
无人自动超车控制系统的设计

无人自动超车控制系统的设计(任务书,开题报告,论文11200字)
摘要
本次设计主要围绕当今社会比热门的无人车和人工智能识别技术领域,而设计一整套完整的无人车智能驾驶系统,在完成自动寻道以及避障的基础上,提出了智能车辆超车行驶的功能的设计要求,使得无人智能车辆的运行更加灵活高效。本次设计的智能车辆的中央处理模块采用stm32为主要控制器,采用PWM技术对无人车的车速进行实时控制从而完成各项行驶功能,各行驶模块实现不同的功能,循迹模块主要进行地面黑线检测,避障模块进行前端障碍物距离的检测并实现自动避障的功能,超车系统的总体功能由外围扩展电路实现并完成。智能车辆在道路上行驶时,行驶程序设置了优先级,使避障程序优先级高于循迹程序,利用超声波避障电路进行障碍物距离的检测和避障,并为超声波模块底座配备舵机从而来控制超声波多角度发射控制,实现多方位避障,无人车的循迹功能由红外探测电路来实现。
关键词:stm32 红外探测 超声波避障 道路循迹 自动超车
Abstract
This design mainly focuses on the design of intelligent overtaking control system based on STM32F103 series microprocessor as the core. The composition of this unmanned overtaking system mainly includes STM32F103 controller, motor drive circuit, infrared detection circuit and ultrasonic obstacle avoidance circuit. This design adopts microprocessor STM32F103 as main control chip, using PWM technology to overtake the system speed and steering gear's steering control ultrasonic carry, the function of each module implements different, tracking module mainly is used to detect the black line on the ground, obstacle avoidance module, test the front obstacle distance and realize the function of the automatic obstacle avoidance, overtaking system's overall function expanded from peripheral circuit implementation and completion. Intelligent vehicle on the road, driving program set priorities, make obstacle avoidance process priority is higher than the tracking procedure, using circuit of ultrasonic obstacle avoidance obstacle detection and obstacle avoidance of the distance, and base for ultrasonic module equipped with steering gear to control ultrasonic multi-angle launch control, implement multi-azimuth obstacle avoidance, unmanned vehicle tracking function implementation by infrared detection circuit [资料来源:www.doc163.com]
[资料来源:www.doc163.com]
目 录
摘要 I
Abstract II
第一章 绪论 1
1.1课题简介 1
1.1国内外无人智能车辆研究现状 1
1.2研究思路 2
第二章 软硬件设计 3
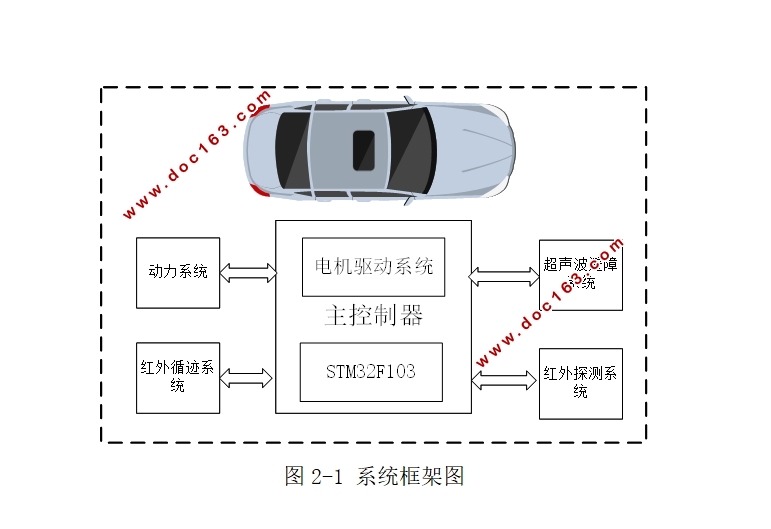
2.1超车系统总框架 3
2.1中央处理模块 3
2.1.2 stm32最小系统电路设计 4
2.1.4 stm32中断介绍 6
2.1.5 stm32定时/计数器介绍 7
2.2 电机驱动模块 7
2.2.1 驱动模块结构及其原理 7
2.2.2 驱动模块电路设计 8
2.2.3驱动软件程序设计 9
2.3 避障模块设计 11
2.3.1 避障模块器件结构及其原理 12
2.3.2 HC-SR04模块硬件电路设计 13
2.3.3 HC-SR04模块程序设计 14
2.4循迹模块设计 17
2.4.1 循迹模块结构和工作原理 17
2.4.2 循迹模块电路设计 18
2.4.3 红外循迹模块程序设计 19
2.5 超车系统综合设计方案 22
第三章 软件调试 24
3.1程序仿真 24
3.2程序下载 25
第四章 无人车系统测试 27
4.1无人车的整体硬件概况 27
4.2无人车整体系统的功能测试 27
4.2.1无人车自动前进探索盲区功能 27
4.2.2无人车自动寻道行驶功能 27
4.2.3无人车的自动超车控制系统功能 28
第五章 总结 29
参考文献 31
致谢 33 [资料来源:http://doc163.com]