
感应式垃圾桶设计
感应式垃圾桶设计(任务书,开题报告,论文15000字)
摘 要
在现代的社会中,基于单片机作为芯片的电子产品可以说融入到我们生活的各个方面,正因为单片机在当代的迅速发展,我们的社会才变得更加智能化,人们的生活才会变得更加方便。因此,在这次的毕业设计里我希望利用我在大学里学到的科技知识来运用到实际当中,改善我们的生活。
现代社会当中,人们越来越强调环保的重要性,然而城市中大部分使用的是传统垃圾桶,这如果不关上垃圾桶的盖子就会散发出十分刺激的异味,如果每一个垃圾桶都要人们亲自去关上盖子就要投入十分多的人力物力,这是一件消耗大量资源的行为。因此,我想通过毕业设计做一个智能化的感应式垃圾桶,当有人人在靠近垃圾桶时垃圾桶的盖子会自动打开,当人人离开时垃圾桶的盖子会自动关闭。另外为了使得垃圾桶更加智能化,我们可以加入一些贴心的小功能,例如当垃圾桶的垃圾装满的时候,垃圾桶蜂鸣器会自动发出响声,可以提醒人们去到垃圾。希望通过可以这个毕业设计,我们可以使得我们的城市更加干净整洁,人们的生活更加方便。
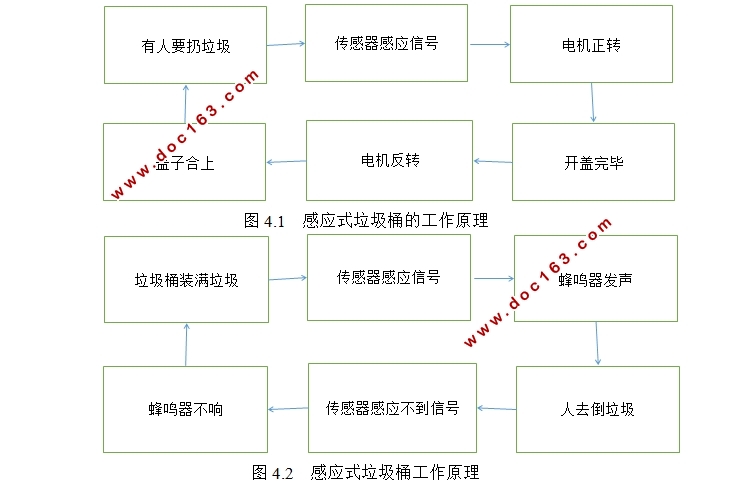
因此,为了能够可以完成目标功能的感应式垃圾桶,我采用了STC89C52单片机作为感应式垃圾桶的控制芯片,红外线传感探测装置、步进电机模块和超声波模块的结合实现了感应式垃圾桶的功能,当人或者人手接近垃圾桶感应范围时(即红外线传感器模块感应到有人接近),垃圾桶盖子会自动打开(即步进电机正转),当人倒完垃圾离开垃圾桶感应范围时(红外线感应模块感应到有人离开),垃圾桶盖子会自动合上(即步进电机反转)。我的感应式垃圾桶还有一个功能是通过超声波模块和蜂鸣器的结合实现的,当垃圾桶的垃圾快要装满时(即有物体接近超声波模块),超声波模块会控制蜂鸣器发出声音,提醒人去到垃圾。平时垃圾不满的时候,超声波模块则会控制蜂鸣器不发出声音,因此不用去到垃圾。
关键词:stc89c52单片机、感应式垃圾桶、红外线感应模块、超声波感应模块
Abstract
In the wake ofrapid development of Microcomputer technology.In the promotion of modern electronic products,almost penetrated into all areas of society, Because of the rapid development of the microcontroller in the contemporary, our society has become more intelligent, people's lives will become more convenient.As a result of, I hope to use in the graduation design I learned in the university of science and technology knowledge to apply to the actual, improving our life.
Nowadays people environmental protection consciousness gradually improve, but most are using the traditional trash can, in a city that if none of the lid will send out a very stimulating smell, if each one is to close the lid to put very much manpower, it is not necessary. So, I want to design a induction trash can, when people come to automatically open the trash can, shut down when people leave trash can, and add some sweet little feature, for example when trash garbage filled with trash buzzer will automatically sends, can remind people to go to waste. The hope can improve the quality of life of the people in the city and improve the environment of the city. [资料来源:http://Doc163.com]
Can, therefore, in order to be able to meet the target function of induction trash can, I adopted the stc89c52 as control chip, infrared sensing detection device, the combination of the step motor and ultrasonic module realized the function of induction trash can, when the person or people close to the trash can (that is, infrared sensor module), bin lid will automatically open (i.e., is a stepping motor), when people leave the trash can, trash can automatically close the lid on inversion (that is, the stepper motor). My induction trash cans and a function is implemented by the combination of ultrasonic module and buzzer, when garbage is filled with trash can (that is, the object close to the ultrasonic module), ultrasonic module control buzzer sound, remind people to go to waste. The ultrasonic module will control the buzzer not to make a sound, so it doesn't need to go to the trash.
Keywords: microcontroller,stc89c52,nduction bin, infrared induction module, ultrasonic induction module
[资料来源:https://www.doc163.com]
目录
第一章 绪论 1
1.1课题研究的背景以及意义 1
1.2国内外研究现状 1
1.3课题研究的主要内容 2
1.4本章小结 3
第二章 感应式垃圾桶的设计要求与方案选择 4
2.1设计要求 4
2.2系统的基本方案选择与论证 4
2.2.1单片机芯片的选择方案与论证 4
2.2.2红外线模块的选择方案与论证 4
2.2.3超声波模块的选择方案与论证 5
2.2.4电机的选择方案与论证 6
2.2.5驱动模块的选择方案与论证 7
2.3电路个模块的选择方案 7
2.4本章小结 7
第三章 感应式垃圾桶元器件介绍 8
3.1STC89C52单片机介绍 8
3.1.1STC89C52主要功能及引脚图 8
3.1.2STC89C52晶振电路 9
3.1.3STC89C52的复位电路 9
3.2红外线模块介绍 10
3.2.1模块描述及电路图 10
3.2.2模块参数说明 10
3.2.3模块工作说明 11
3.2.4模块接口说明以及实物图 11
3.3HC-SR04超声波模块介绍 12
3.3.1模块描述及原理图 12
3.3.2超声波时序图及工作说明 12
3.3.3模块接口介绍与实物展示 13
3.4ULN2003步进电机驱动芯片介绍 13
3.4.1模块描述及原理图 13
3.4.2模块参数说明 14
3.5本章小结 14
第四章 感应式垃圾桶硬件设计 15
4.1系统硬件的目标工作原理分析 15
4.2红外感应模块电路原理设计 16
4.3超声波感应模块HC-SR04电路原理图设计 16
4.4步进电机以及ULN2003控制芯片电路原理设计 17
4.5蜂鸣器电路原理图设计 18
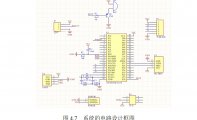
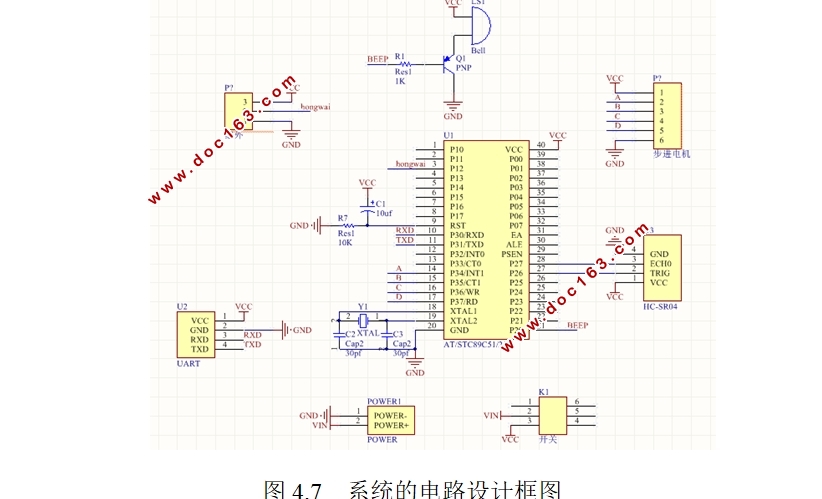
4.6系统的电路设计框图 18
4.7感应式垃圾桶电路原理分析 19
4.8本章小结 19
第五章 系统仿真 20
5.1仿真工具介绍 20 [资料来源:http://doc163.com]
5.2仿真流程图 20
5.3根据目标功能编写程序以及绘制原理图 22
5.3.1超声波模块与蜂鸣器部分 22
5.3.2判断是否有人接近 22
5.3.3判断步进电机保持的工作状态 22
5.4仿真结果分析 23
5.4.1实现感应式垃圾桶功能(1) 23
5.4.2实现感应式垃圾桶功能(2) 24
5.4.3仿真电路图 24
5.5本章小结 25
第六章 总结与展望 26
6.1总结 26
6.2展望 26
参考文献 28
致谢 29
附录 29
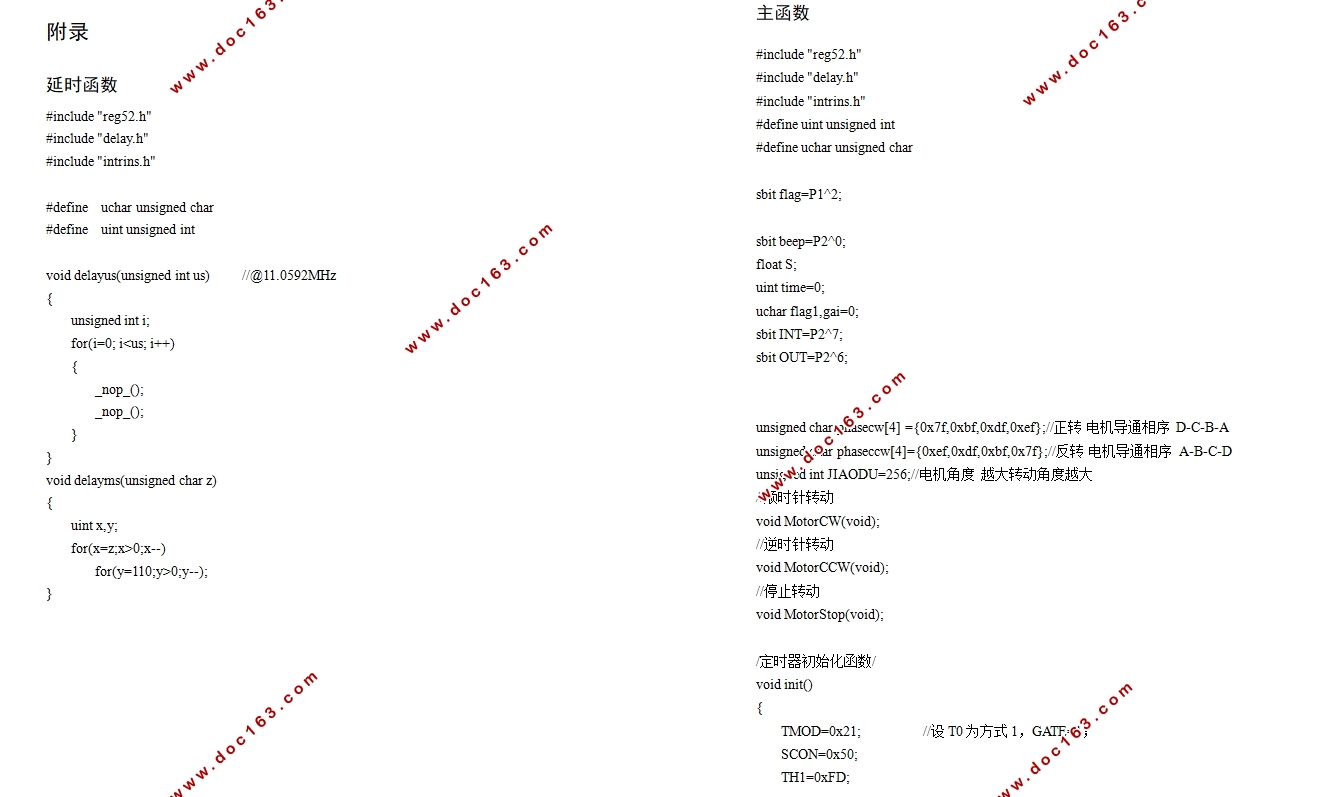
延时函数 29
主函数 30
[资料来源:http://doc163.com]