
汽车起重机防摇动力学分析与控制系统研究(含CAD图,PLC程序)

汽车起重机防摇动力学分析与控制系统研究(含CAD图,PLC程序)(任务书,开题报告,文献摘要,答辩表,外文翻译,论文说明书28000字,CAD图2张,PLC程序)
摘要
本文以起重机载荷的自然摆动为研究对象,依据输入整形理论研究了抑制起重机系统载荷摆动的输入整形控制方案,并做出了相应的仿真实验研究,仿真结果表明该输入整形控制方案能对起重机系统载荷摆动起到有效的抑制作用,进而提高了起重机系统载荷的定位精度,缩短了起重机运输时消耗的时间,提高了起重机的工作效率、安全性和可靠性。最后以正反向POSICAST输入整形法为基础编写了PLC控制程序。
关键字:起重机;防摇控制;输入整形;PLC
Abstract
In this paper, the natural swing of the crane load for the study, based on input shaping theory crane system load input shaping control scheme suppress swing and make the corresponding experimental study simulation results show that the scheme can input shaping control system of the crane load swing play an effective inhibition, thereby increasing the accuracy of positioning the crane system load, reducing the time spent crane transport, improve the efficiency of cranes, safety and reliability. Finally, the positive and negative input shaping method POSICAST prepared on the basis of the PLC control program. [来源:http://www.doc163.com]
Key words:Cranes, anti-sway control, input shaping,PLC
[资料来源:http://Doc163.com]

[资料来源:Doc163.com]
目录
第一章绪论 1
1.1 汽车起重机防摇研究的目的和意义 1
1.2 国内外研究现状 3
1.3 研究内容及方法 5
第二章理论推导 6
2.1 起重机三维数学模型 6
2.2 起重机二维数学模型 9
第三章输入整形 12
3.1输入整形器的研究现状 12
3.2输入整形原理 14
3.3 灵敏度曲线 18
3.4 输入整形器的设计方法 19
3.4.1 脉冲响应法 20
3.4.2 灵敏度曲线法 20
3.4.3 零极点对消法 21
3.4.4 频率法 23
第四章仿真实验 25
4.1三脉冲响应消摆法的仿真 25
4.2 正反向POSICAST输入整形法的仿真 28
4.3 消摆控制方案的确定 31
第五章 PLC控制程序 33
5.1 PLC概述及其系统组成 33 [资料来源:www.doc163.com]
5.2可编程序控制器(PLC)的选取及其特点 36
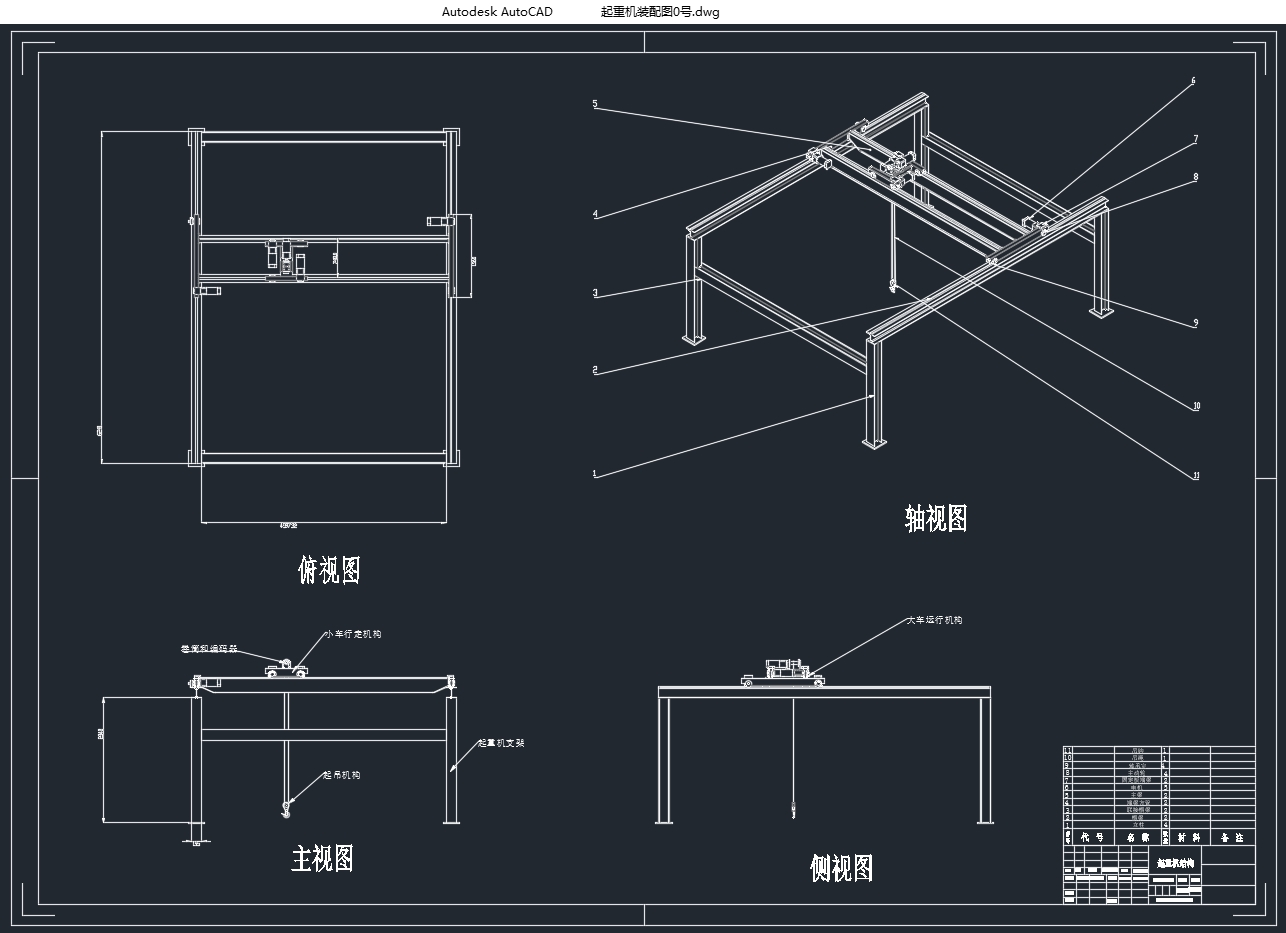
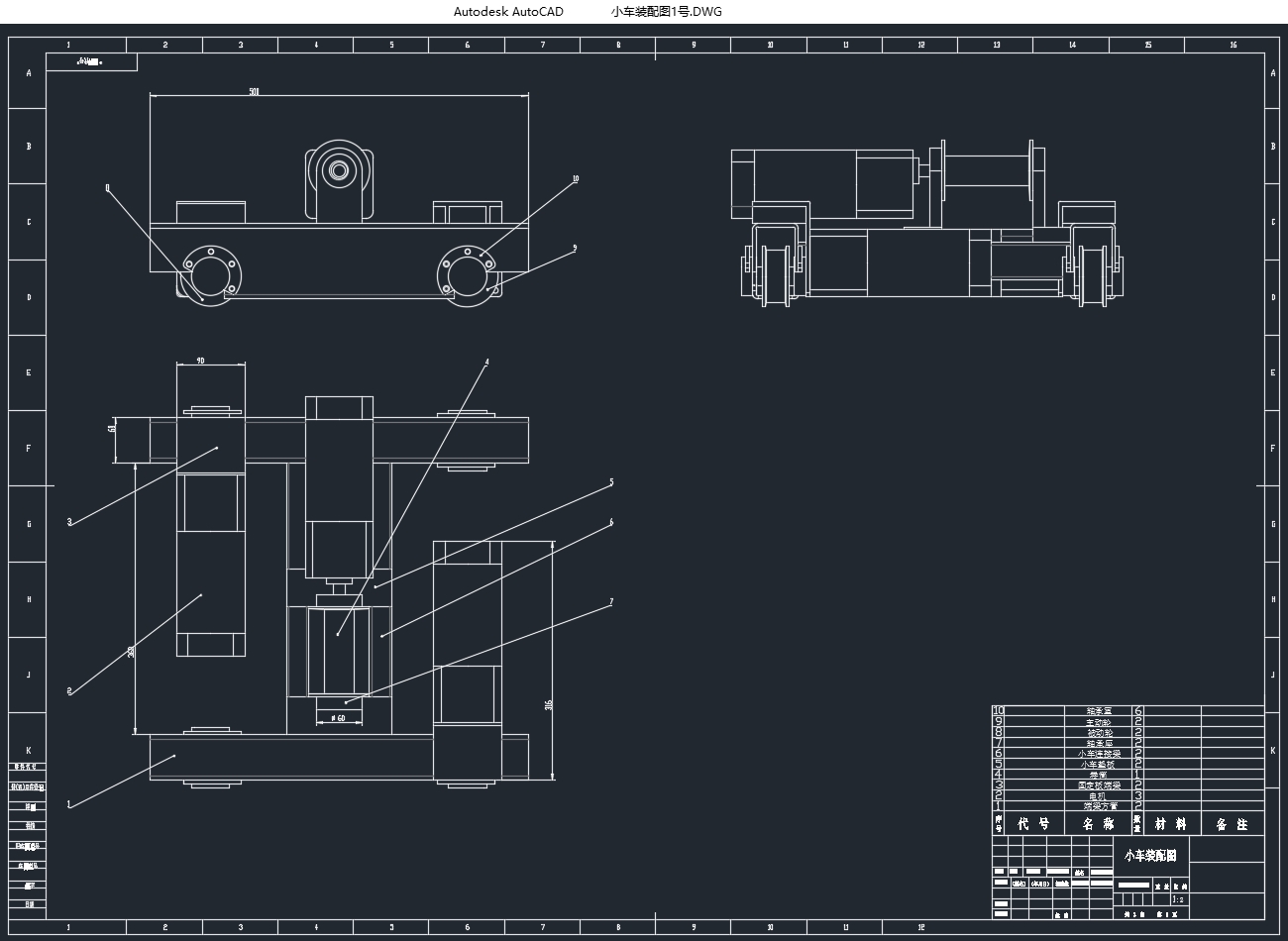
5.2 起重机结构介绍 37
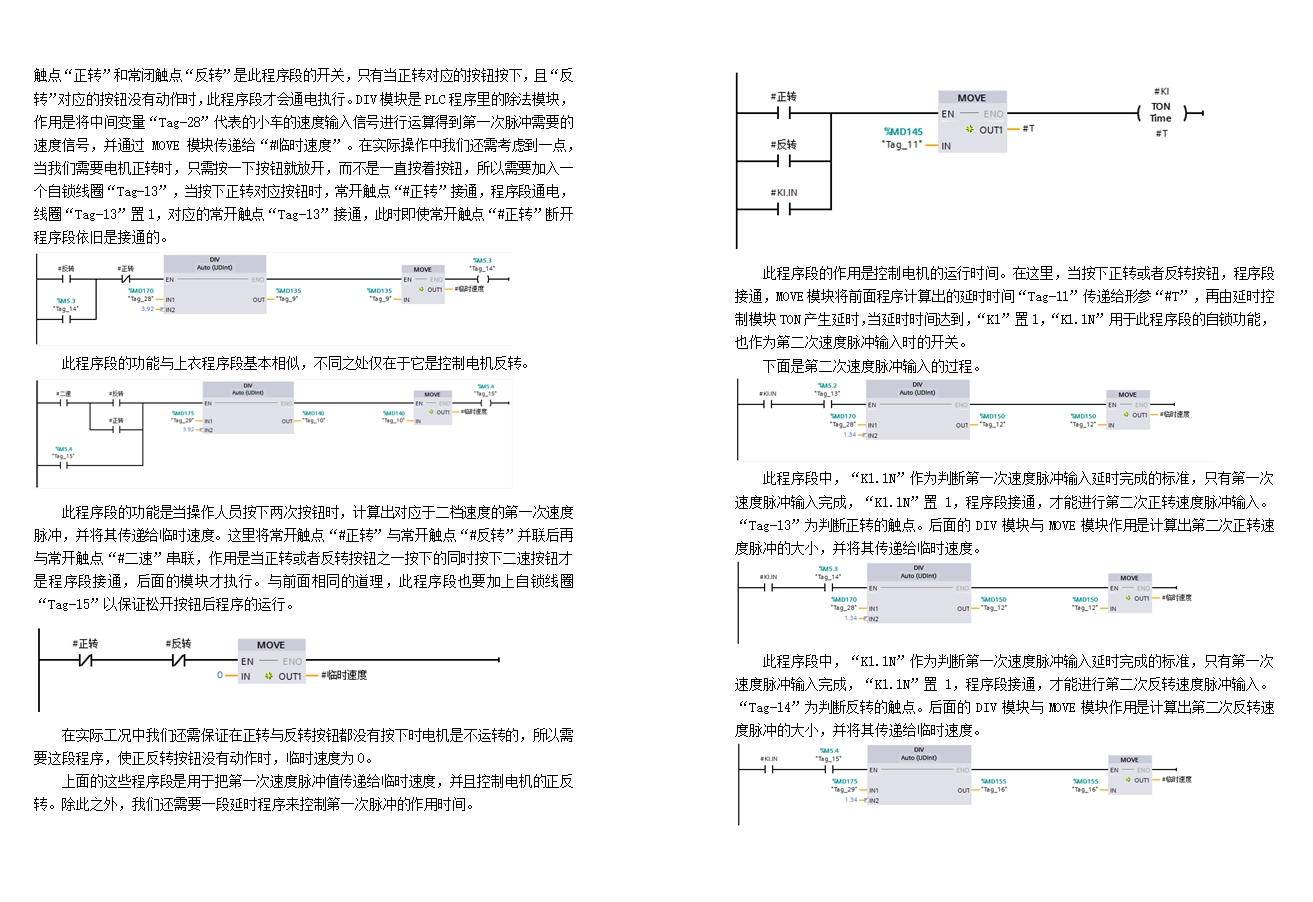
5.3 PLC控制程序的编写 39
5.3.1小车运行程序 39
5.3.2 基于正反向POSICAST方法的消摆程序 43
第六章全文总结 49
6.1 结论 49
6.2 有待进一步解决的问题 49
参考文献 51
致谢 53
下一篇:冷链物流车辆的车联网应用策略研究(含CAD图,源代码)