
�����ɶȼӹ�������������������붯��ѧ����(KUKA������)

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.����ѧϰ�ο�֮��.
�� �� �� ��������
�����ɶȼӹ�������������������붯��ѧ����(KUKA������)(������,���ⱨ��,����˵����21000��,MATLAB,SolidWorks��άͼ)
ժ Ҫ
��ʵ�ʵ�����ҵ������У���ҵ�������Ѿ��㷺Ӧ���ڻ�е�ӹ������洦������Ʒ���˵��������̣���ҵ�����˵Ŀ������о���������������ӹ��������ṩ�Ͷ������ʾ�����Ҫ���塣
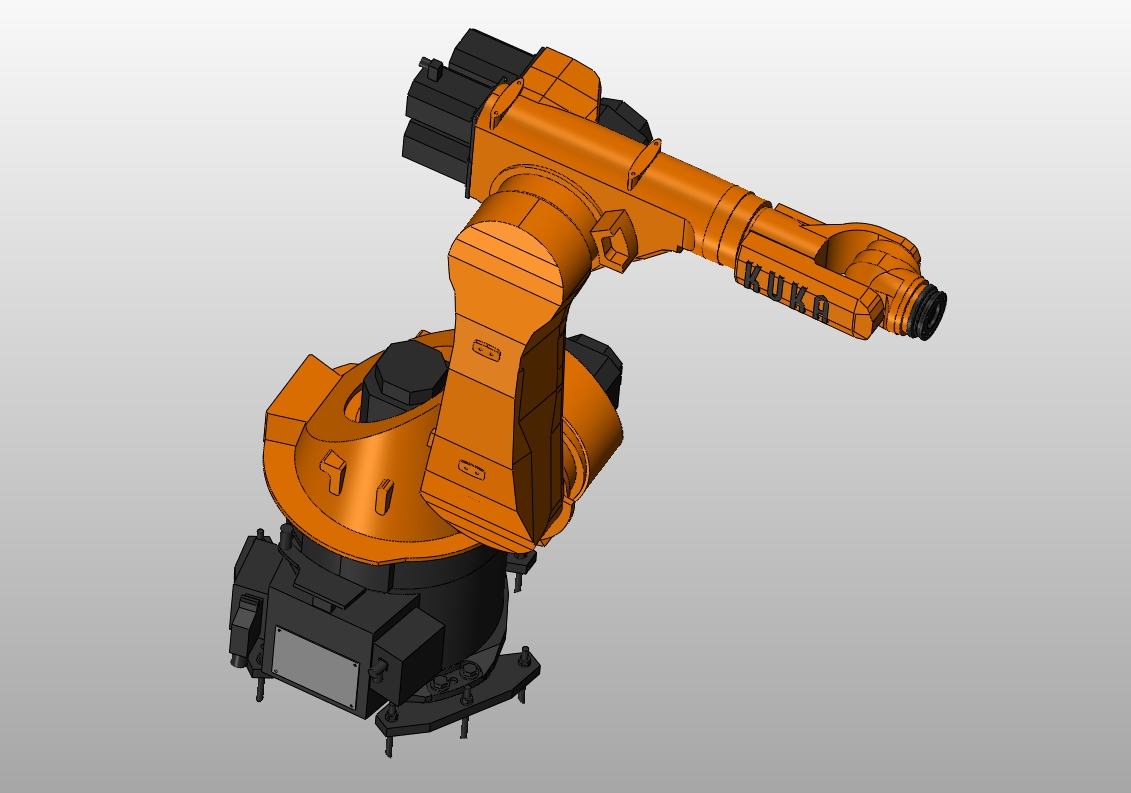
�������KUKA KR60�ӹ������˵�������������MATLAB�У�����RoboticsToolbox�����佨����D-H�����µ�����������ϵ�����Թؽ�ת�Ǵ���ƫ����ʵ������ת���ģ�ͽ������������Ż�����ʵ�ʼӹ�·�߽���·���滮���ƣ���һ���͵ĵ�һ����ӹ�·���е������˶�ѧ���з�������֤��������ģ�͵ĺ����Ժ켣�滮��ȷ�ԡ�
�ڴ˻����ϣ������˸������ɶȼӹ������˵���άʵ��ģ�ͣ�ͨ�������ӿڽ���������˵���ADAMSƽ̨���ڸ��������ؽ��ϣ����վ�������˵ļ��β���������ԭ�����˶�Լ��������������άʵ��ģ�ͽ����˶���ѧģ�ͣ�ͨ����MATLAB�������ݵ�������ʵ����ADAMS����ѧģ���еĹ켣�滮����Ծ�����˶�������������ڲ�ͬ�ն������¶���ʵ��·�����ȵ�Ӱ�죬ȡ����һϵ�жԱ����ݣ�Ϊ�Ż������˵Ľṹ�����Ƽӹ������������о��ṩ�˾���һ����ֵ�����ݡ����⣬����ADAMS/Vibrationģ����л�������ģ̬���������������������ۣ��Ըû����˿��������صķ��淽�����˳���̽�֡�
������ɫ��������KUKA KR 60�����˵Ļ����ṹ��ʵ�ʲ�����ʼ������������۷��������˶�ѧ�붯��ѧģ�ͣ����нϺõ������ԣ������о���ҵ�����˵��˶���ʽ��·���滮���Ż���ƾ���һ���IJο���ֵ��
�ؼ��ʣ������ɶȻ����ˣ��˶�ѧ����������ѧ����
Abstract
In the actual manufacturing activities, industrial robots have been widely used in mechanical processing, surface treatment, goods handling and other processes. The development and research of industrial robots is of great significance for improving the quality of manufacturing and providing labor productivity.
Aiming at the physical parameters of the existing KUKA KR60 processing robot, the six-link coordinate system under the standard D-H method is established by using the Robotics Toolbox in MATLAB, and the model of the deviation at the joint corner and the actual logical axis of rotation is simplified and optimized. The actual processing route is controlled by path planning, and the forward and inverse kinematics in a typical single-direction processing path is achieved. The rationality of the model and the accuracy of trajectory planning are verified by analysis.
On this basis, the three-dimensional entity model of the six-degree-of-freedom machining robot is established. The virtual robot is imported into the ADASM platform through software interface. On each driving joint, the dynamic model is established based on the three-dimensional entity model, referring to the geometric parameters, transmission principle and motion constraints of the specific robot. The trajectory planning control of the ADAMS dynamic model is realized by sorting out the analysis data of MATLAB. Aiming at the specific motion, this thesis analyses the influence of different stiffness conditions on the actual path accuracy, and obtains a series of comparative data, which provides valuable data for optimizing the structure of the robot, improving the processing quality and subsequent research. In addition, the ADAMS/Vibration module is used to analyze the vibration modes of the robot, and the simulation results and conclusions are given. The simulation method of the robot considering the vibration factors is discussed preliminarily.
Characteristics of this thesis: Starting from the analysis of the basic structure and actual parameters of the existing KUKA KR 60 robot, combining with theoretical analysis, the kinematics and dynamics model is established, which has a strong coherence, and has a certain reference value for understanding the motion mode, path planning and optimization design of industrial robots.
Key words: Six-degree-of-freedom robot, kinematics analysis, dynamics analysis
KUKA KR60�����˵���Ҫ��������
���� KUKA KR 60 ��ҵ������
����أ�KG�� 60
���Ӹ��أ�KG�� 35
�ṹ��ʽ ����
���� 6
�����뾶��mm�� 2033
�ظ����ȣ�mm�� ±0.05
�������Χ���ٶ� ��һ��±185° 140°/S
�ڶ��ᩀ35°/-135° 126°/S
�����ᩀ158°/-120°140°/S [��Դ��http://www.doc163.com]
������±350° 260°/S
������±119° 245°/S
������±350° 322°/S
����������KG�� 665
��װ��ʽ ��أ�����
����ϵͳ KRC4
λ�÷��� ���������
[��Ȩ���У�http://DOC163.com]




[��Դ��http://www.doc163.com]

Ŀ¼
ժҪ ��
Abstract ��
��1������ 1
1.1 ������о�Ŀ�ļ����� 1
1.2�������о���״ 1
1.2.1�����о���״ 1
1.2.2�����о���״ 2
1.3 ���ĵ���Ҫ���� 3
��2�� KUKA KR 60�������˶�ѧ���� 4
2.1 KUKA KR60 ��ҵ�����˼������� 4
2.2 ��е����Ҫ�㲿�� 6 [������Դ��https://www.doc163.com]
2.3 �����˿ռ�λ������ 9
2.3.1 �����������ת 10
2.3.2 ��ת��ƽ�Ƶ���� 11
2.4 �����ɶȻ�����D-H������ģ 11
2.4.1 ��D-H���� 11
2.4.2 KUKA KR60��е�۱�D-H�������� 13
2.4.3 KUKA KR60��е�۱�D-Hģ�ͽ��� 14
2.5 �����ɶȻ������˶�ѧ 17
2.5.1 ���˶�ѧ���� 17
2.5.2 ���˶�ѧ���� 18
��3�»���MATLAB�����˼ӹ��Ĺ켣�滮 20
3.1 �ؽڿռ�λ���˶� 20
3.2 �ѿ����ռ�켣�滮 22
3.3 KUKA KR60 �����˼ӹ�·�� 24
3.3.1 ������� 24
3.3.2 ����ǰ��� 25
3.3.3 �����˶��� 26
3.3.4 �˶�ѧ������ 27
��4�»���ADAMS�Ļ����˶���ѧ��ģ���� 30
4.1 �����ɶȻ����˶���ѧ 30 [������Դ��http://doc163.com]
4.1.1ϵͳ���������� 30
4.1.2 �������ն���ѧ���� 31
4.2 ADAMS��������ģ���� 32
4.2.1 ��άģ�͵��� 32
4.2.2 ���ת�ӵij��� 33
4.2.3Լ���Լ��������� 34
4.3 ����ʵ������ 37
4.3.1����ʵ�����ݵ����� 37
4.3.2����ʵ�����ݵĵ��� 38
4.3.3����ʵ�����ݵ����� 38
4.4 �������նȼ�����������ȷ�� 39
��5�·���������� 41
5.1�˶�ѧ�켣�ȶ� 41
5.2�նȶ�ĩ���˶���Ӱ�� 42
5.2.1 �նȶ�ĩ��λ�Ƶ�Ӱ�� 42
5.2.2�նȶ�ĩ�˼��ٶȵ�Ӱ�� 45
5.2.3�նȶ�ĩ���ٶȵ�Ӱ�� 47
5.3��ģ̬���� 49
��6���ܽ���չ�� 50
6.1�����ܽ� 50
6.2����Ӱ���뾭���Է��� 50
6.3�о�չ�� 51
����� 53
��¼ 55
��л 59
��һƪ��MQ4040���ۼ��������ػ��������(��CADͼ,SolidWorks��άͼ)
��һƪ��MQ4025�������ػ����弰�ۼ�ϵͳ���(��CADͼ,SolidWorks��άͼ)