
轮式循迹机器人的控制系统设计与试验研究(含CAD电路图)

轮式循迹机器人的控制系统设计与试验研究(含CAD电路图)(任务书,开题报告,外文翻译,论文计算书18000字,CAD电路图1张)
摘要
随着科学技术的进步,对工业机器人尤其是特种机器人技术发展越来越快,其应用领域越来越广泛。自主移动轮式机器人属于特种机器人的一个重要分支,在工作人员不宜进入的危险和恶劣的工作环境中,可代替人工而完成一些简单重复性的工作,因此在生产生活中具有一定的应用价值。本文针对诸如核电厂的极端环境下对机器人技术的应用需求,选用Arduino UNO开发平台,融合多传感器的检测信息,设计一款轮式循迹机器人监控系统,在自主移动的基础上可完成对机器设备的工作环境的实时监控及阈值通知功能。主要研究内容和成果包括:
(1)分别阐述轮式循迹监控机器人的功能需求,提出轮式循迹监控控制系统开发的总体方案;采用模块化思想,分析各个模块功能,合理选型硬件控制系统,并搭建运动监控系统架构。
(2)建立循迹机器人的运动学模型,考虑机器人本体距离参数不为零的情况,讨论在非完整约束系统中,将机器人位姿作为输入控制信号函数,分析其随时间变化的响应曲线。分析传统底层速度反馈PID算法,结合建立的运动学模型,添加历史运行参数,进一步优化开发的自主循迹控制算法,实现速度调控的准确性和可靠性。 [资料来源:Doc163.com]
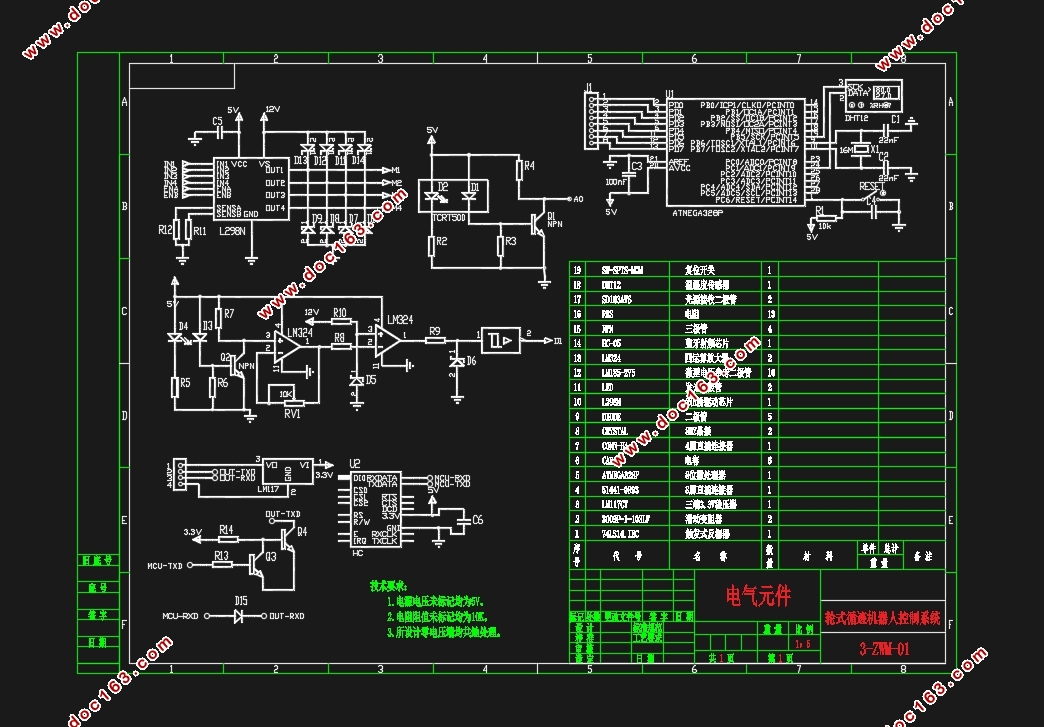
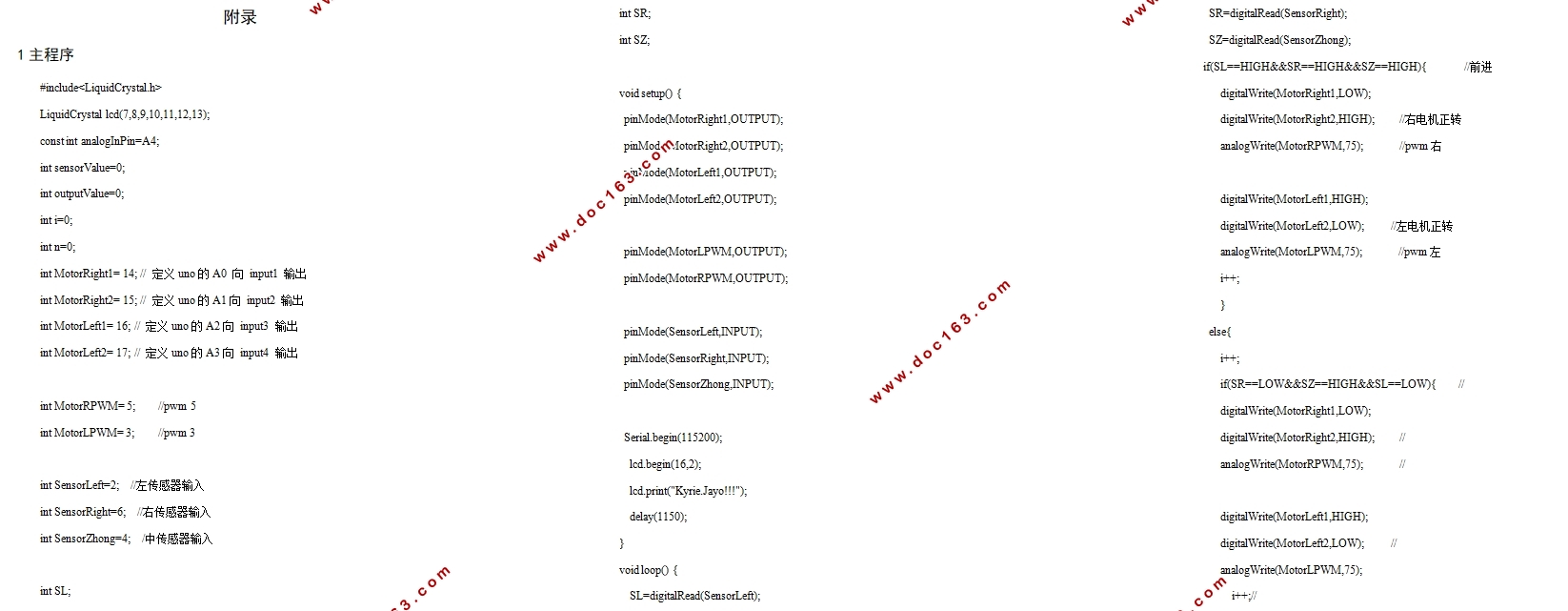
(3)采用ATmega328为处理器的Arduino UNO开发平台,分析设计外围电路及系统软件。硬件设计由稳压电路、各传感器电路及无线通信电路等组成;程序开发主要有主程序设计、传感器I/O程序、自主循迹程序及串口通讯等。
(4)搭建试验平台,调试分析循迹监控机器人的各个模块。对比多组移动速度、位移等参数,校正循迹控制算法,提高其转向性能;将环境数据上传云空间,生成实时设备监测曲线,对比历史数据,并进行阈值报警通知设定。
关键词: 轮式机器人;运动学模型;循迹;控制算法
Abstract
With the development of science and technology, the robot technology has become a research hotspot in the field of Opto-Mechatronics technology, especially the development and application of industrial robots and special robots. The autonomous wheeled mobile robot is an important branch of the special robot, and its range of application areas is wide, especially in the dangerous and harsh working environment the staff can not reach, it can replace the artificial and do some simple repetitive work, so it has a certain application value in production and life. In extreme environments such as nuclear power plants, using Arduino UNO development platform, detecting of multi sensor information fusion, we design a wheeled robot tracking monitoring system. The robot having real-time monitoring and notification threshold function based on autonomous mobile can be completed on machinery and equipment working environment. The main research contents and achievements of this paper include: [资料来源:http://www.doc163.com]
(1) The paper analysis functional requirements of wheeled robot tracking monitoring, puts forward the design scheme of the control system of the whole; The function of each module is analyzed based on a modular method, the reasonable selection of hardware control system and a motion control system architecture is set up.
(2) The kinematics model of the mobile robot is built, considering the distance parameters of the robot is not zero. In the nonholonomic constraint system, the robot’s pose as input of control signal function, analysis of the time-varying curves of the response.By analysing of traditional motion control PID algorithm, combining with the kinematics model of the robot, adding the historical operating parameters, and optimizing tracking control algorithm of robot, the accuracy and reliability of motion control is achieved.
(3) On the Arduino UNO development platform using ATmega328 as the processor, it analysis and design of peripheral circuits and system software. The hardware design includes voltage regulator circuit, sensor circuit and wireless communication circuit; software design includes main program design, I/O program, self tracking sensor and serial communication program.
(4) By building the test platform, each function tracking monitoring robot is tested and analysed. Comparing with Group velocity, displacement and other parameters is helpful to correct tracking control algorithm to improve the robot steering performance; Other features include: uploading environmental data to cloud space, generating real-time monitoring curve, compared to historical data, and seting the threshold alarm notification.
Key Words:a wheeled robot; kinematics model; tracking; control algorithm
[资料来源:https://www.doc163.com]

目录
1绪论 1 [资料来源:http://www.doc163.com]
1.1 研究的背景 1
1.2 国内外研究现状分析 1
1.3 研究的目的及意义 3
2轮式循迹机器人系统分析与总体设计 4
2.1系统需求分析 4
2.2系统总体设计 4
2.2.1系统组成部分 4
2.2.2控制系统的模块及设计 5
2.2.3 机械系统的结构及设计 6
3轮式循迹机器人运动控制算法研究 10
3.1 PID算法及PWM调速原理 10
3.1.1 PID算法控制原理 10
3.1.2 直流电机PWM调速原理 12
3.2循迹算法的设计 13
3.2.1路径识别算法 13
3.2.2基于运动学模型的循迹算法 15
4轮式循迹机器人控制系统硬件设计 19
4.1电源供电模块 19
4.2主控模块 20
4.2.1主控芯片介绍 20
4.2.2最小系统介绍 21 [来源:http://Doc163.com]
4.3传感器模块 22
4.3.1红外循迹模块 22
4.3.2测速模块 23
4.3.3环境监测模块 25
4.4电机驱动模块 26
4.5无线通信模块 27
5轮式循迹机器人控制系统软件设计 30
5.1主程序设计 30
5.2循迹子程序设计 31
5.3无线通信子程序设计 32
6系统试验与测试分析 36
6.1 循迹机器人测试平台 36
6.2 速度参数测试 37
6.3 循迹算法测试 39
6.4 无线通信测试 41
7总结与展望 45
参考文献 47
附录 49
1主程序 49
2.电路图 54
致谢 56
[资料来源:http://www.doc163.com]
上一篇:发动机连杆的锻模设计(含CAD图,SolidWorks冷锻件三维图)
下一篇:三自由度机械臂系统设计及控制(圆柱坐标式机械手,10Kg)(含CAD图)