
三自由度机械臂设计及控制(含CAD装配图,PROE三维图)

三自由度机械臂设计及控制(含CAD装配图,PROE三维图)(任务书,开题报告,外文翻译,实习报告,论文说明书12000字,CAD图3张,PROE三维图)
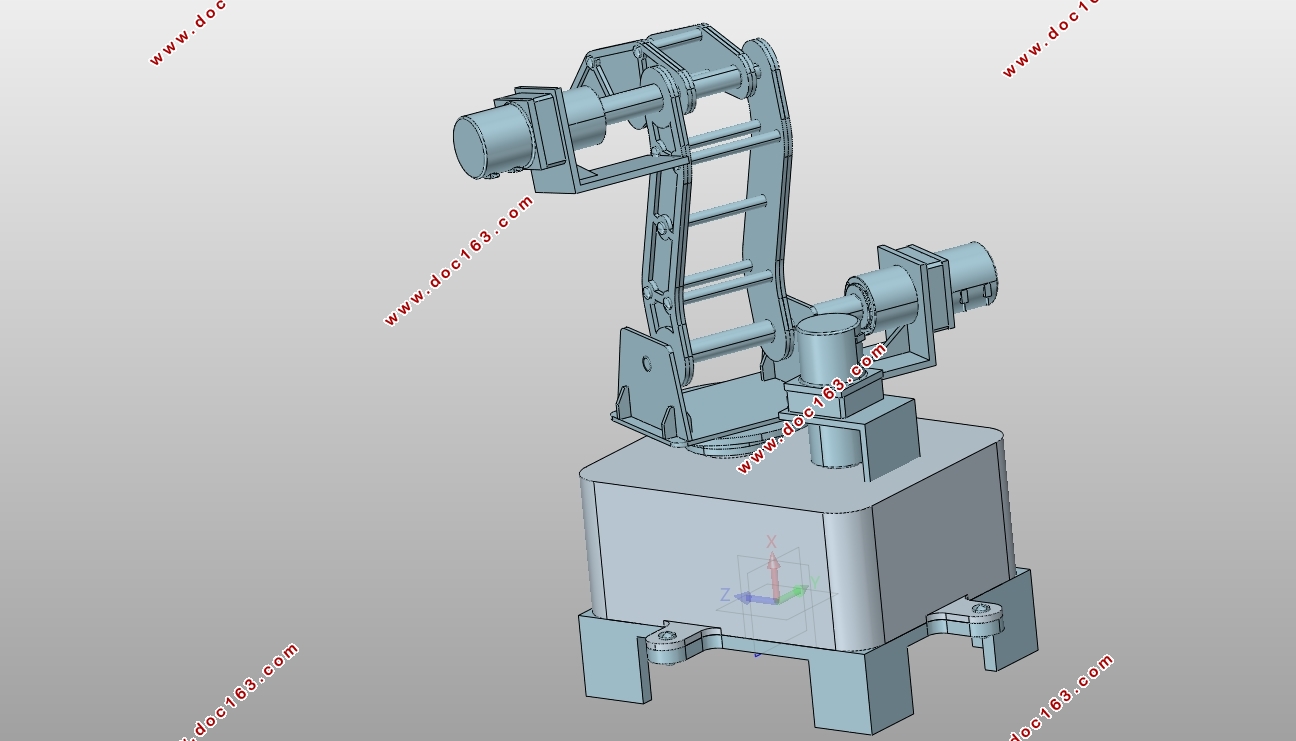
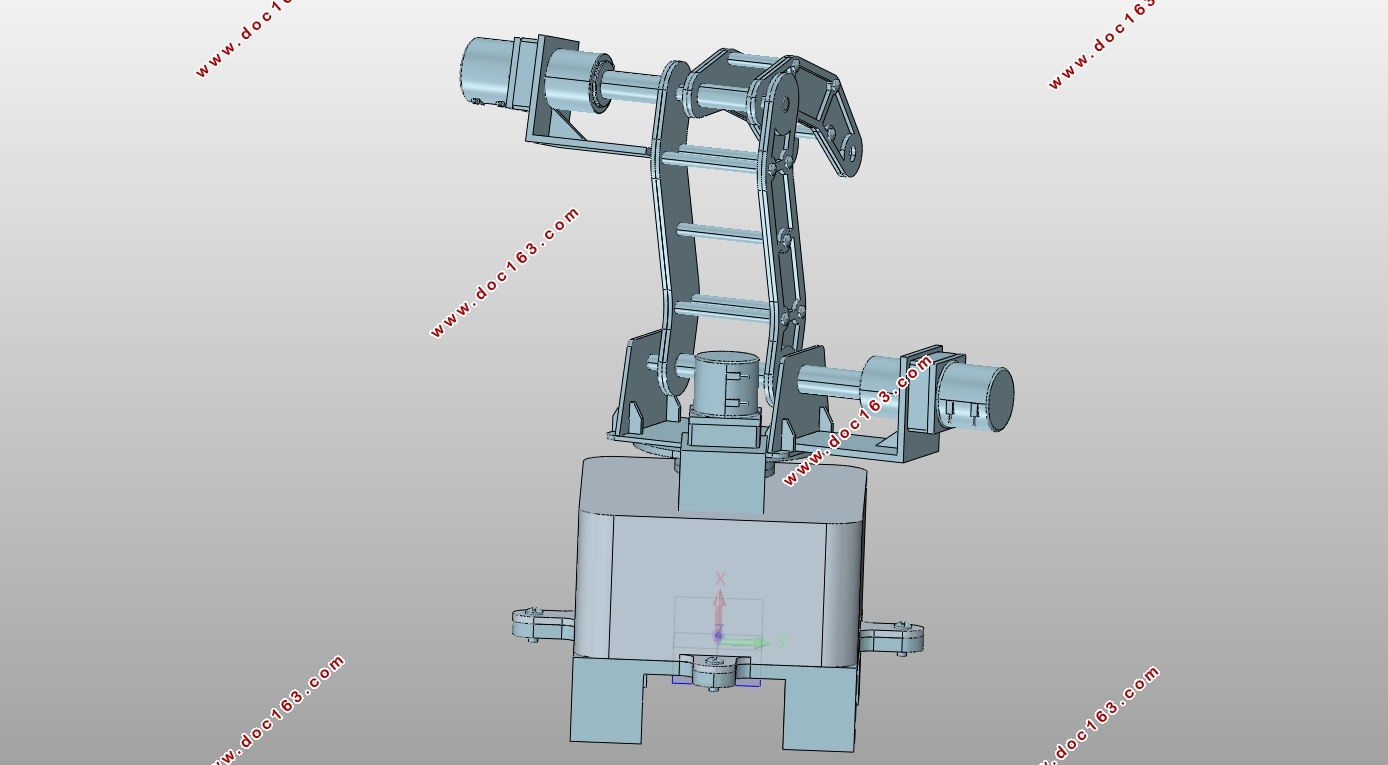
本文设计为三自由度机械手臂机构与控制系统的设计,起包括腰、肩、肘三个关节自由度,由大小臂与动力型旋转关节组成。其动作灵活,所占空间小,工作范围大,能在狭窄空间内绕过各种障碍物。首先,本文将设计机器人的底座、大小臂的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的动力传输系统,控制系统,包括电机的选择、数据采集卡和驱动器的选择、端子板电路的设计以及控制软件的设计,重点加强传动部分的可靠性和机器人运行过程的安全性,最终实现的目标包括:腰部的旋转运动,大臂的俯仰运动,大臂移动副的伸缩运动,能够应用于焊接、装配、搬运等作业。
关键词:机械手 自由度 伺服 大臂 小臂
机器手臂重要设计参数
根据本机器人的应用要求。设计手臂为关节型结构形式,其自由度共三个,所持重量为3kg,驱动方式为直流伺服电机,控制方式为单片机。
腰部高为0.5m
大臂有效长度为0.40m(大臂关节到小臂关节的距离) [来源:http://Doc163.com]
小臂有效长度为0.45m(小臂关节到手腕的距离)
各部分的运动范围采取如下方案:
腰回转为-90°~ +90°
大臂摆动为-45°~ +90°
小臂摆动为-240°~ +60°
[来源:http://www.doc163.com]


 [资料来源:http://doc163.com]
[资料来源:http://doc163.com] 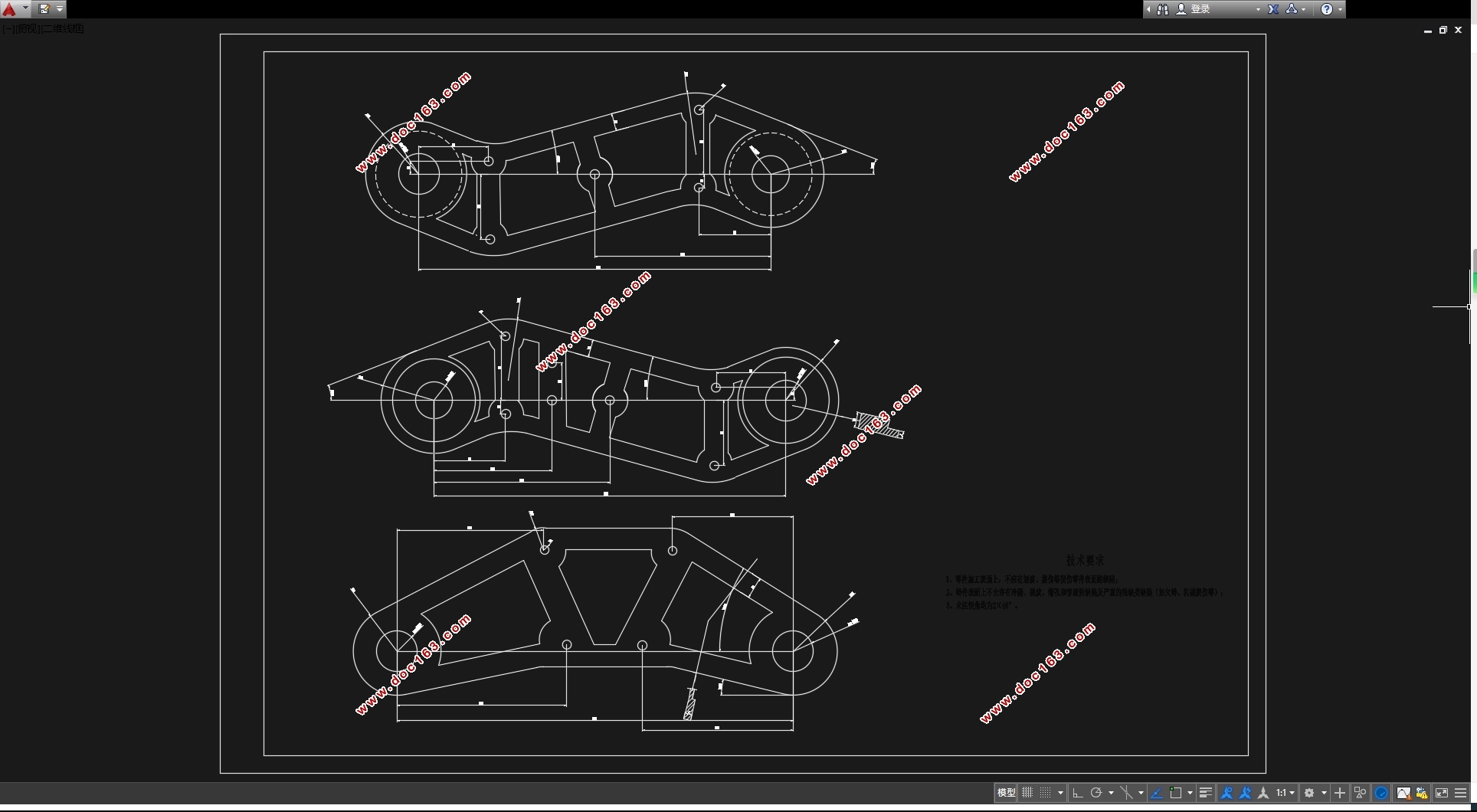


目录
摘 要 I
Abstract II
第一章 绪论 1
1.1工业机器人概述 1
1.2系统构成 1
1.2.1控制信息 1
1.2.2示教、存储和再现 2
[资料来源:Doc163.com]
1.3工业机器人国内外发展现状 2
1.3.1国外 2
1.3.2国内 3
1.4机器人发展趋势 4
第二章 机械手臂的设计方案 5
2.1机械手的坐标型式 5
2.2机械手臂驱动系统 6
2.3机器手臂重要设计参数 7
2.4关节设计 8
2.4.1基座 8
2.4.2大臂 8
2.4.3 小臂 9
第三章 电机的选择与设计计算 10
3.1 主要技术参数的确定 10
3.2 各关节电机的选择计算 10
3.2.1 大臂旋转电机的选择 11
3.2.2 小臂旋转电机的选择 12
3.2.3 腰部旋转电机的选择 14
第四章 机械部件的设计与校核 16
4.1 轴的设计与校核 16
4.1.1 大臂旋转轴的设计 16 [来源:http://www.doc163.com]
4.1.2 大臂轴的强度校核 16
4.1.3 小臂臂旋转轴的设计 19
4.2 键的选择与强度的校核 20
4.2.1大臂旋转轴键联接处键的强度校核 20
4.2.2小臂旋转轴键联接处键的强度校核 21
4.3 轴承寿命的校核 21
4.4 联轴器的选择与圆锥销的校核 22
4.4.1 联轴器的选择 22
4.4.2 联轴器圆锥销的校核 23
第五章 控制系统软件 24
5.1控制系统总体设计方案 24
5.2硬件电路设计 24
5.2.1单片机系统 25
5.2.2电机驱动芯片 27
5.2.3 光耦隔离电路 28
5.2.4 时钟电路 28
5.2.5 复位电路 29
5.2.6 电源隔离 30
5.2.7稳压电路以及电源滤波储能 30
5.3 硬件电路图 30 [来源:http://www.doc163.com]
5.4 伺服电机驱动原理 31
5.5主程序设计 31
5.6调试分析 33
总结 34
参考文献.
致谢..
[来源:http://www.doc163.com]
下一篇:能量回收型减振器的设计与分析(含CAD零件图装配图,STEP三维图)