
三自由度机械手腕设计及控制(含CAD装配图,PROE三维图)
三自由度机械手腕设计及控制(含CAD装配图,PROE三维图)(任务书,开题报告,论文说明书10000字,CAD图3张,PROE三维图)
摘 要
机器人技术是结合许多如计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等诸多学科的学科知识,从而形成的高新技术,是当今研究领域十分重视的课题,机器人在很多领域都得到广泛应用。像机器人这类高科技产品也在不断的进行技术的革新。对一个机器人而言,手腕是一个很关键的部位,它是连接末端执行器与手臂的关键,具有改变或调整执行器方位的作用。
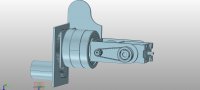
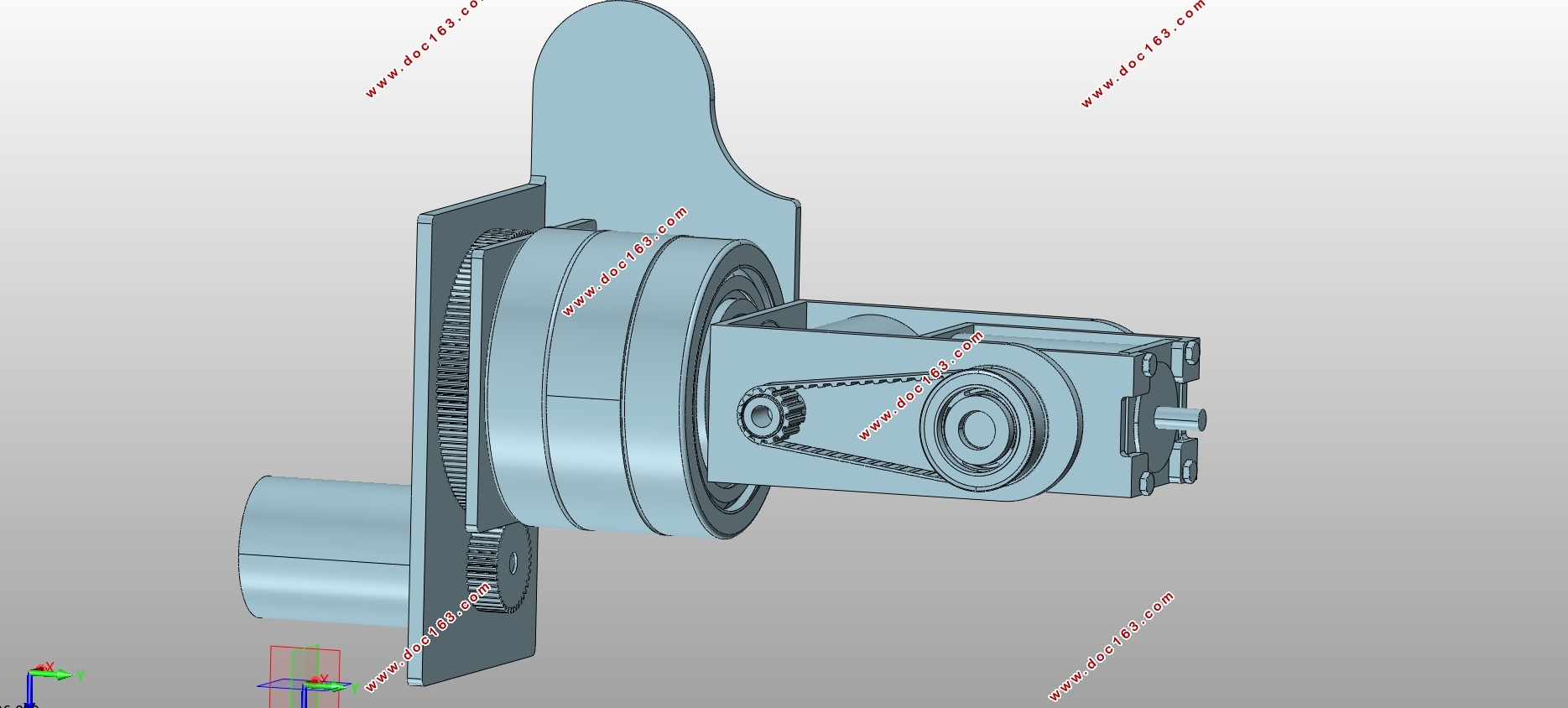
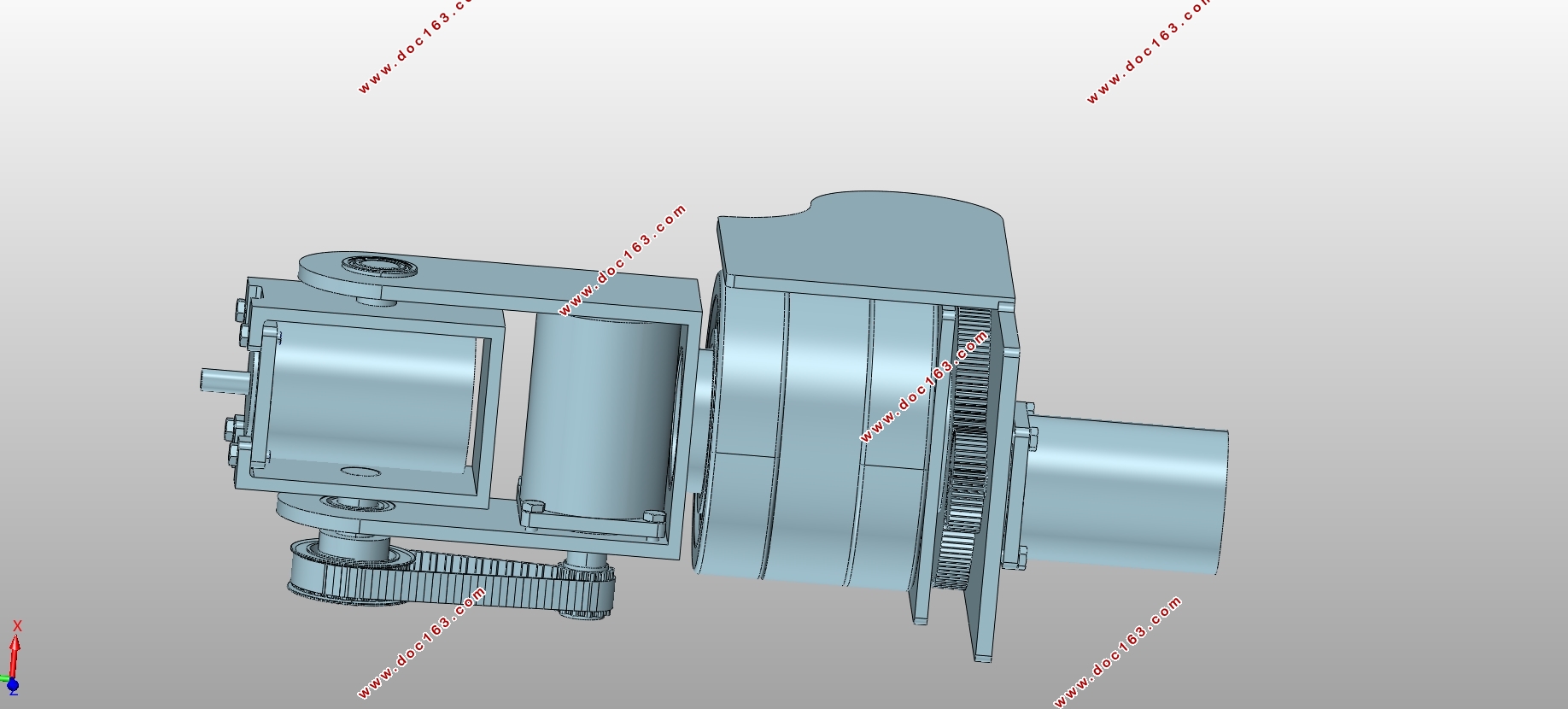
本文的主要任务是设计并控制一个三自由度的机械手腕,在已有的技术资料的基础上,通过分析,选择适合的腕部传动系统结构,然后计算出腕部所需的输出功率,从而推算出腕部所需的电机。在确定电机和传动机构的基础上,对圆柱齿轮和传动中所需的同步带轮以及同步带进行设计,并且对它们进行校核,确定所设计的机械腕部结构能够配合机器人的其他结构进行所需的规定动作。并用PRO/E软件完成3D建模过程。最后通过PRO/E直接导出CAD的工程图图纸。控制系统上选择了单片机与步进电机的配合,规划了电机正转、电机反转、电机加速与电机减速等几部分的流程框图。
关键词:三自由度 单片机 腕部 机器人
Design of Robot Wrist with Three Degrees of Freedom and the Control System
Abstract
Robot technique is a synthesis of many subjects, such as computer, control technology of multidisciplinary theory, mechanism, information and sensor technology, artificial intelligence, bionics and form, is the research field of attached great importance to the issue, robots have been widely used in many fields. For a robot, the wrist is a very important part, it is the key to connect the output power and the arm. It has the function of changed or adjusted the range of action.
The main task of this paper is to design a robot wrist with three degrees of freedom, based on the existing technical data, through analysis, to determine the transmission system of the wrist, and assuming that the wrist end structure, then calculates the required motor wrist. Based on determining the motor and transmission mechanism, the belt wheel required gear and the drive and the synchronous toothed belt design, and carries on the examination to determine their wrist structure, designed to be able to cooperate with other part to finish the required movement. And the 3D modeling process is completed by PRO/E software. Assemblies drawing are directly derived from PRO/E. Control system select the single-chip microcomputer and stepper motor , Design the flow diagram of motor transfer, motor reversal, motor acceleration and motor deceleration.
Keywords: three degrees of freedom manipulator;single-chip microcomputer;wrist;robot

 [来源:http://Doc163.com]
[来源:http://Doc163.com] 

目 录
摘要 Ⅰ
Abstract Ⅱ
第一章 绪论 1
1.1机器人概述 1
1.2机器人现状 2
1.2.1工业机器人的国内现状 2
1.2.2工业机器人的国外现状 3
1.3机器人发展趋势 4
第二章 机械手腕的设计方案 5
2.1技术要求 5
2.2手腕的自由度 5
2.2.1单自由度手腕: 5
[资料来源:http://www.doc163.com]
2.2.2二自由度手腕: 6
2.2.3三自由度手腕: 7
2.3手腕的驱动方式 7
2.4机器人重要设计参数 8
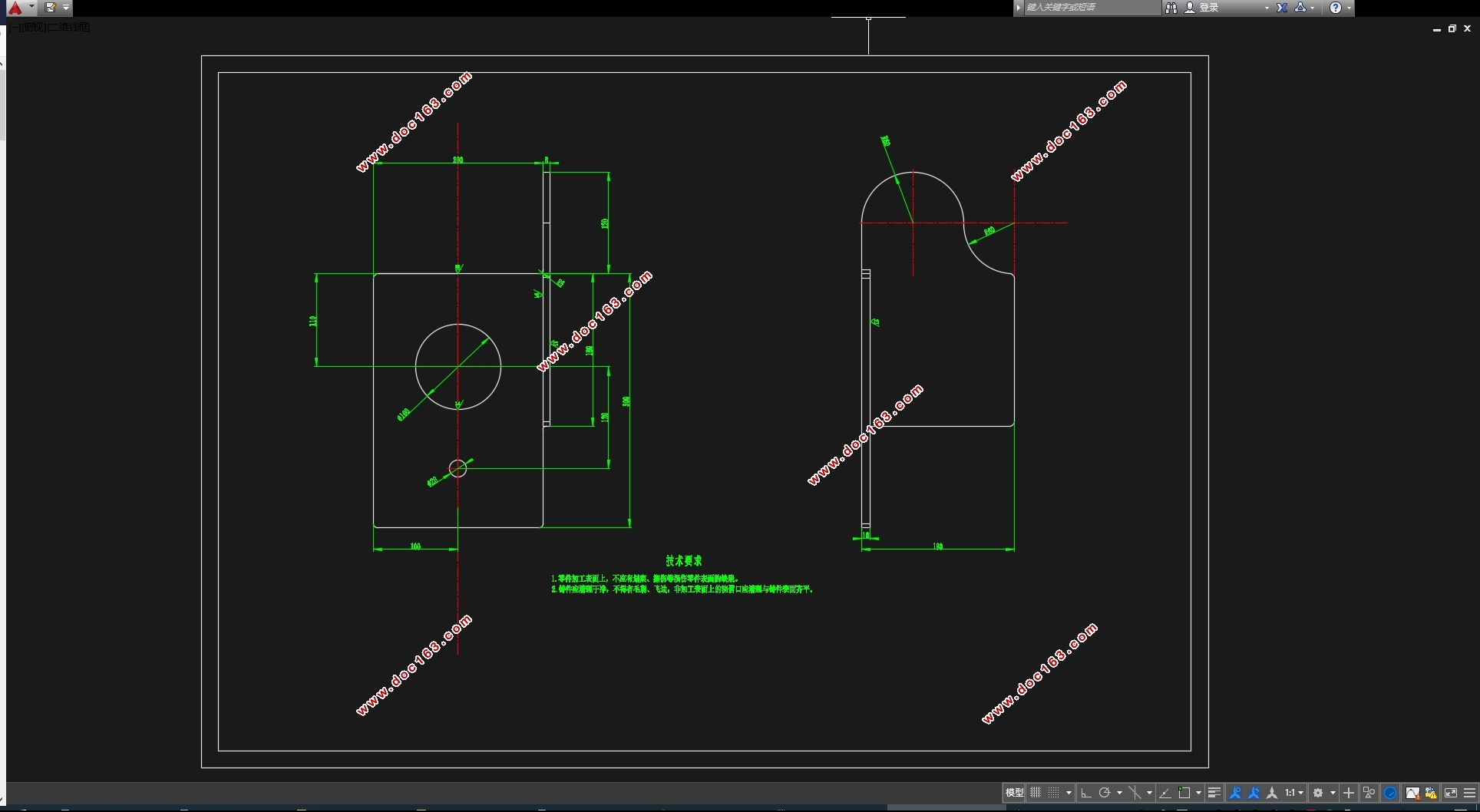
2.5手腕设计详细说明 8
2.6手腕电机的选择 9
2.7齿轮的设计 10
2.7.1 设计准则 10
2.7.2按齿面接触疲劳强度设计 10
2.7.3计算基本尺寸 11
2.8同步带轮的设计 14
2.9壳体的选择 19
第三章 控制系统硬件 20
3.1步进电机介绍 20
3.2单片机介绍 20
第四章 系统软件设计 22
4.1 系统主程序 22
4.2 查键部分 23
4.3 正转部分 24
4.4 反转部分 25
4.5 加速部分 26
4.6 减速部分 27
第五章 总结 28
[资料来源:https://www.doc163.com]
参考文献 29
致谢 30
[来源:http://Doc163.com]
上一篇:65t/66.5m岸桥梯形架设计及三维建模设计(含CAD总图,梯形架SolidWorks三维图
下一篇:高精度三轴运动平台设计及控制(5kg负载)(含CAD零件图装配图)