
冲床上下料机械手的设计(含CAD零件图装配图)

冲床上下料机械手的设计(含CAD零件图装配图)(任务书,开题报告,论文说明书10000字,CAD图7张)
摘要
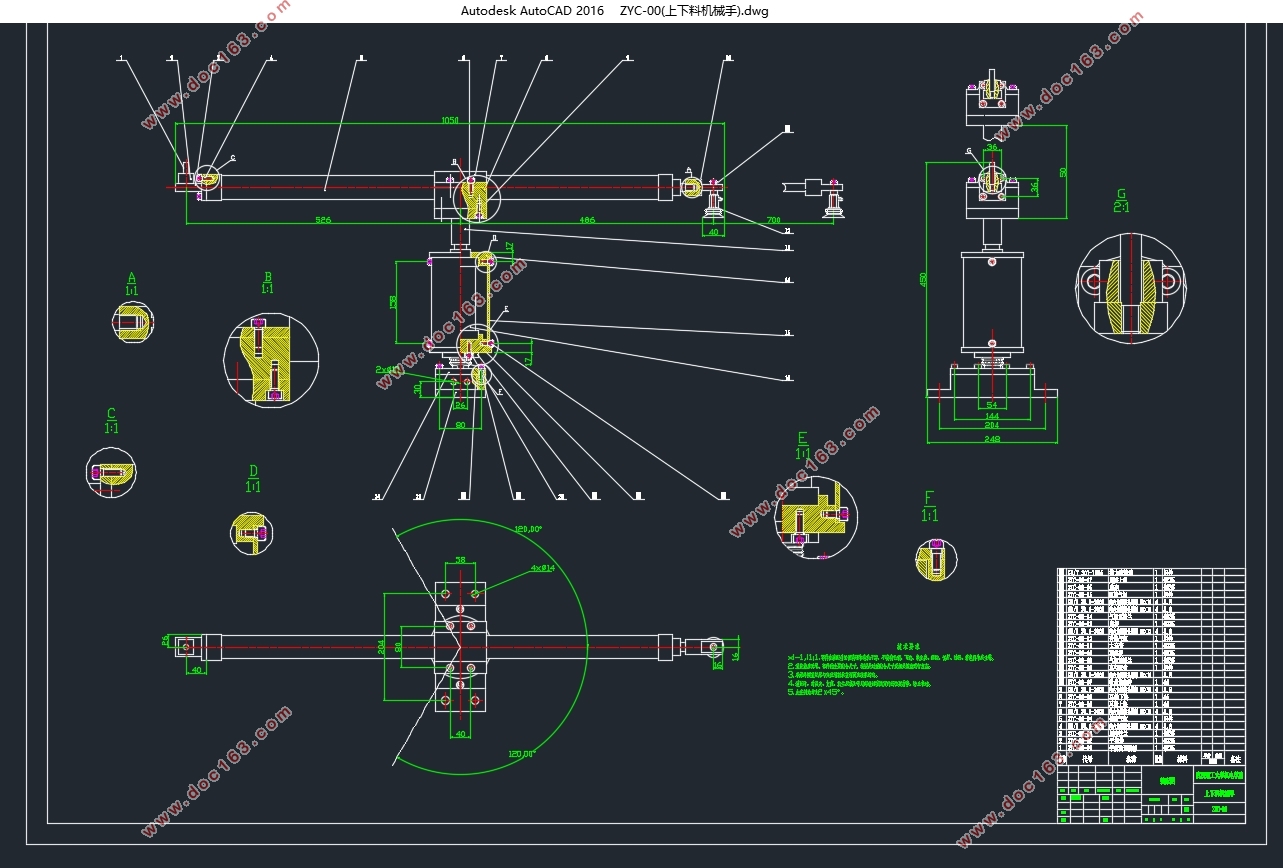
首先对选题及老师所给技术要求进行分析,对上下料机械手的结构进行大概的设计,所需要实现的各种运动及其所采用的机构或者实现方法,拟出总体结构设计示意图,估算出大概的结构尺寸和重量,借助solidworks软件针对上下料机械手总体设计方案进行建模,再根据给定要求及数据设计选择吸盘,进而确定伸缩气缸的型号,估算伸缩部分及吸盘处总质量计算分析选择升降气缸的型号,估算以上质量后选择好连接方式,及旋转运动的回转气缸,同时还涉及到轴承的选择。整个涉及过程中不断分析对比实现同种运动的不同方式的优劣之处,从而选择出相对比较好的方案并采用。设计完成后对各部分进行分析,确定尺寸选择最后的型号完成总装图及零件图。
论文主要研究了冲床上下料机械手所要实现的运动并进行结构设计来完成其运动。
研究结果表明:采用气压驱动比起液压驱动优势更多,设计的上下料机械手结构相对紧凑,动态性能比较稳定。
本文的特色:从执行机构、驱动系统对上下料机械手进行结构设计,从经济性、实用性、美观等各方面进行设计的结构,各项设计参数均有设计说明。 [版权所有:http://DOC163.com]
关键词:上下料机械手;气压驱动;负压式吸盘;
Abstract
In this paper, we first analyze subject to the manipulator's technical requirements, the manipulator to general design, implement various movements of the agency or implementation method, draw a sketch of the overall structure of the design, to estimate the approximate size and weight of the structure.With Solidworks software on material mechanical hand, the overall design modeling, again according to the given requirements and design data for selecting the disc, and then determine the telescopic cylinder models, computational analysis of the lifting cylinder model for estimating the total mass of the telescopic part and a sucker, the above quality estimation after the choice of a good connection, and the rotating motion of the rotary cylinder, but also related to the bearing selection.The involved constantly in the process of analysis and comparison of the advantages and disadvantages of different ways in which the same movement, so as to choose a relatively good scheme and the. After the completion of the design of each part were analyzed, determine the size choose the last models to complete the assembly drawing and parts drawing.
In this paper, the movement of the machine hand of the punch is studied, and its structure is designed.
The results show that the design of the upper and the lower manipulator is relatively compact, and the dynamic performance is relatively stable compared with the hydraulic drive.
The characteristics of this paper: from the implementation mechanism, the driving system of the upper and lower material manipulator structure design, from the economic, practical, aesthetic and other aspects of the design of the structure, the design parameters are designed.
Key Words:Up and down material manipulator; pneumatic drive; negative pressure suction cup;
设计参数及要求:
送料行程:700mm
升降行程:50mm
最大负载:3kg
运转周期:2.2sec
送料精度:±0.3mm
工件抓取方式:真空吸附
[版权所有:http://DOC163.com]
目录
第1章 绪论 1
1.1 工业机器人的特点 1
1.2 工业机械手的基本组成 1
1.2.1 执行机构 2
1.2.2 驱动系统 4
1.2.3 控制系统 4
1.3规格参数 4 [来源:http://Doc163.com]
1.4工业机械手的技术发展 5
1.5设计要求 5
第2章 上下料机械手的方案设计 6
2.1总体方案设计 6
2.2 机械手的坐标型式与自由度 7
2.3手部结构方案设计 7
2.4 手臂结构方案设计 7
2.5 机械手的驱动方案设计 7
2.5.1气动系统 7
2.5.2液动系统 8
2.5.3电动驱动系统 8
2.5.4机械驱动系统 8
2.6 机械手的控制方案设计 8
2.7 机械手的主要参数 9
第3章 手臂结构设计 10
3.1 总体结构设计 10
3.3气缸的设计选型 10
3.3.1升降及伸缩模块气缸的确定 11
3.3.2回转模块气缸的确定 12
第4章 结构设计分析计算 14
4.1 手部分析计算 14 [资料来源:www.doc163.com]
4.1.1吸附力的计算 14
第5章 总结 17
参考文献 18
致 谢 19
[资料来源:https://www.doc163.com]
上一篇:16吨随车起重机液压系统设计和节能分析(含CAD图)
下一篇:GXC800数控滚铣车复合机床设计-车削部分(含CAD图,PROE三维图)