
高精度三轴运动平台设计及控制(含CAD图)

高精度三轴运动平台设计及控制(含CAD图)(论文说明书10000字,CAD图4张)
本课题的主要研究内容
三轴运动平台作为高精度运动设备中的不可或缺的一部分,一些高精度运动的指令都需要在该平台上来进行。针对三轴运动平台的国内外的发展现状及以后的发展趋势,本篇论文将主要对以下几个分点进行一些研究:
首先根据对三轴运动平台的使用要求以及使用环境,进行一些参数上的预期工作。然后根据实际情况,进行对三轴运动平台的结构设计,提出平台的主要结构以及设计理念。
根据三轴运动平台的结构特性,进行与之匹配的控制器的设计,设计最适合的控制器的方案。
结合已得出的控制器方案,选择相应的控制软件。之后在进行软件编程,达到能够控制三轴运动平台的目的。
针对本次毕设提出的研究观点以及设计方案进行一个总结,然后对三轴运动平台的发展做一个畅想与期待。
三轴运动平台的结构设计
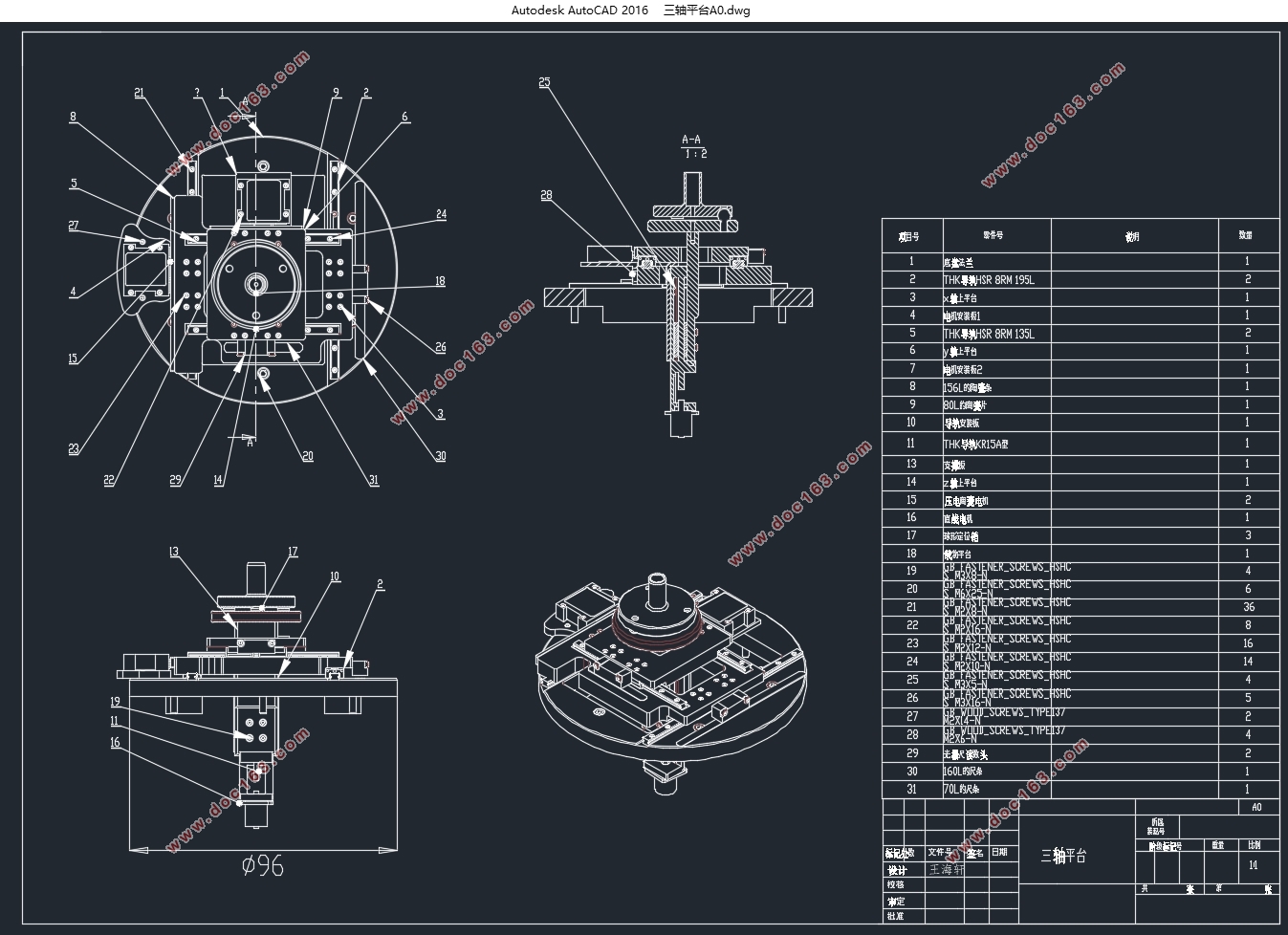
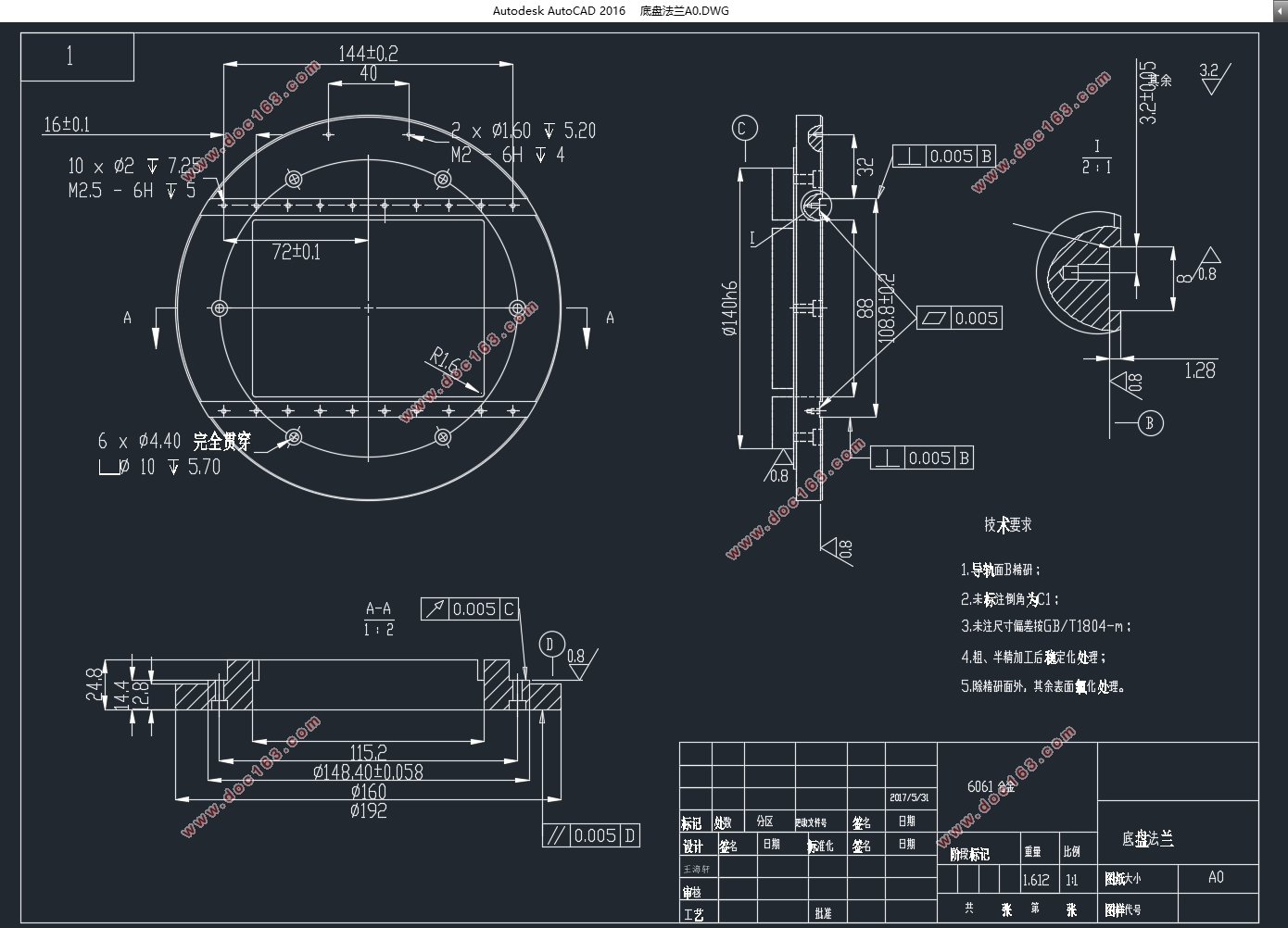
在设计三轴运动平台的控制器之前,必须要先对三轴运动平台结构进行设计。在三轴运动平台的机械结构上,主要由是电机、光电编码器、位移传感器以及运动托板等构成。
[来源:http://www.doc163.com]
三轴运动平台的设计要求
此三轴平台主要应用于精密的场合,对其首要工作要求是能够对小直径重量的物体迅速准确的定位。现对该高精度三轴运动平台的设计要求如下:
三轴平台由三个部分组成,X方向平台、Y方向平台和Z轴方向。其中对X轴和Y轴两个方向所在的平面要求是两者能够产生联动的效果,从而使该平台具有能够对物体进行高精度直线插补的功能,其中对X轴方向与Y轴方向的运动托板的速度要求是20µm/s到2mm/s之间。
该三轴运动平台的定位精度要求是±5µm,负载要求是不高于2KG,其中运动平台的有效工作范围不大于140×60 〖mm〗^2。
Z轴方向上要求能够进行竖直方向的上下不间断运动,同时要具备承受一定的负载和保持承受该负载的能力,定位精度要求是±0.02mm,工作范围是40mm。
三轴运动平台的总体结构
该系统采取的驱动方法的优劣将直接影响到三轴运动平台系统整体的性能,集中表现在精度、速度、行程等方面。由于对X平面与Y平面的定位精度要求比较高,所以这里采用一种全新的特殊的驱动方式——压电陶瓷直线驱动技术。
同时因为设计要求中的对Z轴的精度没有X、Y向的高,但是需要Z轴有一点的负载能力,所以在Z轴方向的方案就将采用伺服电机加丝杠驱动的方案。
为了要实现三轴平台能够进行高精度的运动,对于驱动和控制来说都需两部分:工作台的机械结构和运动平台的驱动部分。
[来源:http://www.doc163.com]

目录
摘要 I
Abstract II [资料来源:http://Doc163.com]
第一章绪论 3
1.1 课题来源及研究背景 3
1.2 国内外三轴运动平台的研究现状 3
1.2.1 国外研究概况 4
1.2.2 国内研究概况 5
1.3 本课题的主要研究内容 6
第二章三轴运动平台的结构设计 7
2.1 三轴运动平台的设计要求 7
2.2 三轴运动平台的总体结构 7
2.3 三轴运动平台结构分析 8
2.4 三轴运动平台的电机及驱动器 10
2.4.1 压电陶瓷直线电机以及驱动器 10
2.4.2 交流伺服电机及驱动器 11
2.5直线导轨及丝杠 11
2.6 光栅位置传感器 13
第三章三轴运动平台的控制方案设计 14
3.1 X、Y轴的控制方案 14
3.2 Z轴的控制方案 15
3.3 控制系统的设备 16
3.3.1工业控制机的选择 16
3.3.2运动控制卡 17
3.4 运动控制卡与工控机的接口连接 17
3.4.1 运动控制卡与工控机的连接 17
第四章控制系统的软件设计 20
4.1 人机的交互界面 20
4.1.1 系统的软件平台 20
4.1.2 系统软件编程工具 21
4.2 系统的初始化 22
第五章总结 23
致谢 24
参考文献 25 [版权所有:http://DOC163.com]
下一篇:数控磨齿机床主轴箱传动系统三维建模(含CAD零件图装配图,PROE三维图)