
智能消毒机器人的移动结构设计(含CAD零件图装配图,SolidWorks三维图)
智能消毒机器人的移动结构设计(含CAD零件图装配图,SolidWorks三维图)(论文说明书12000字,CAD图6张,SolidWorks三维图)
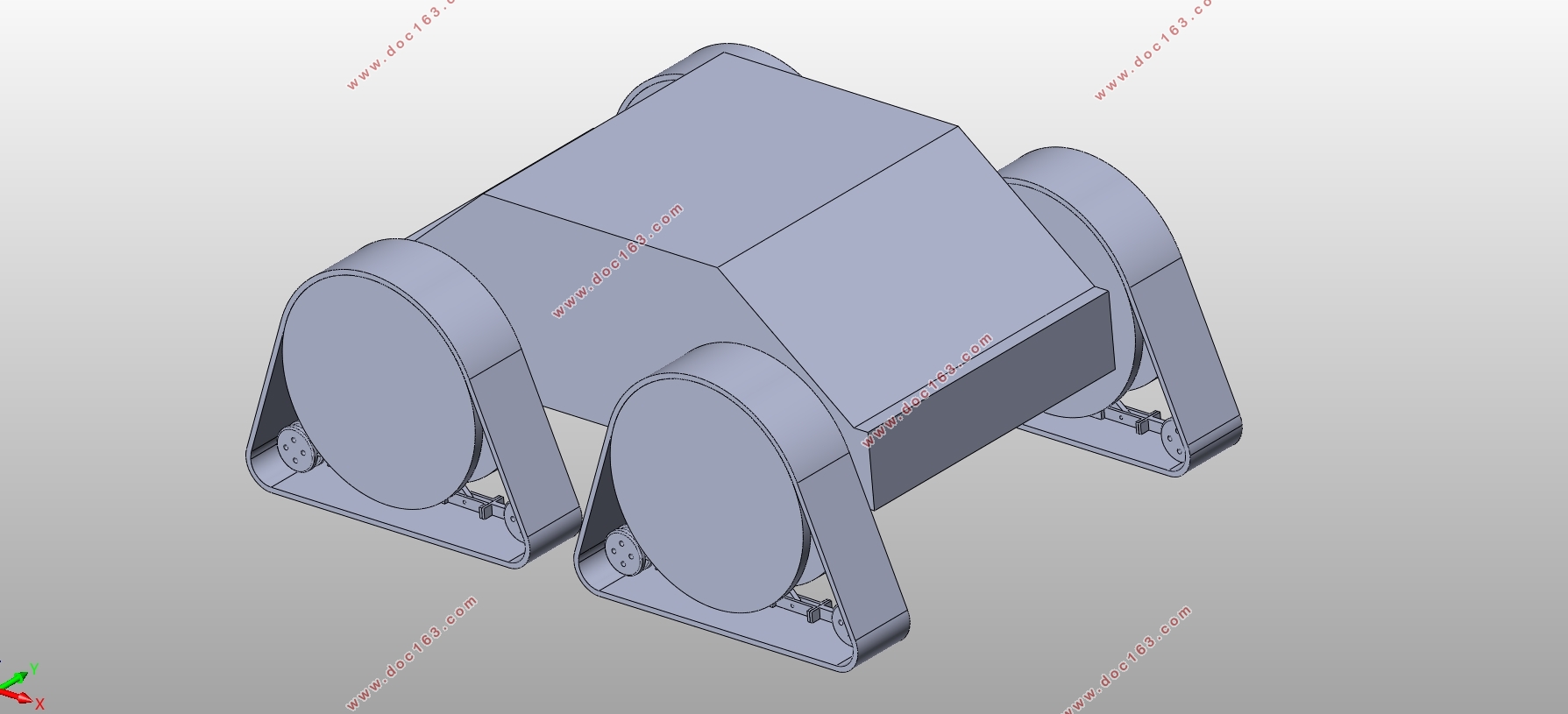
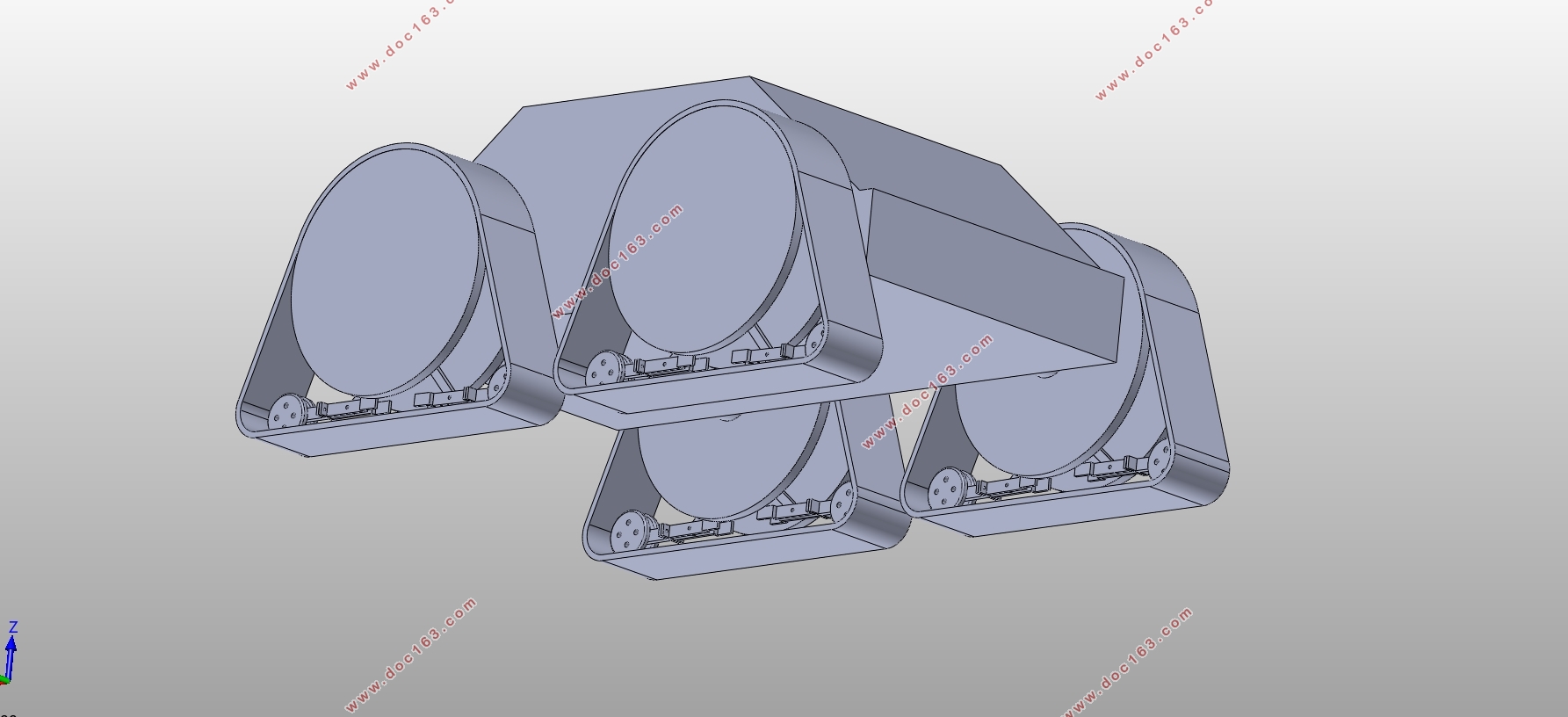
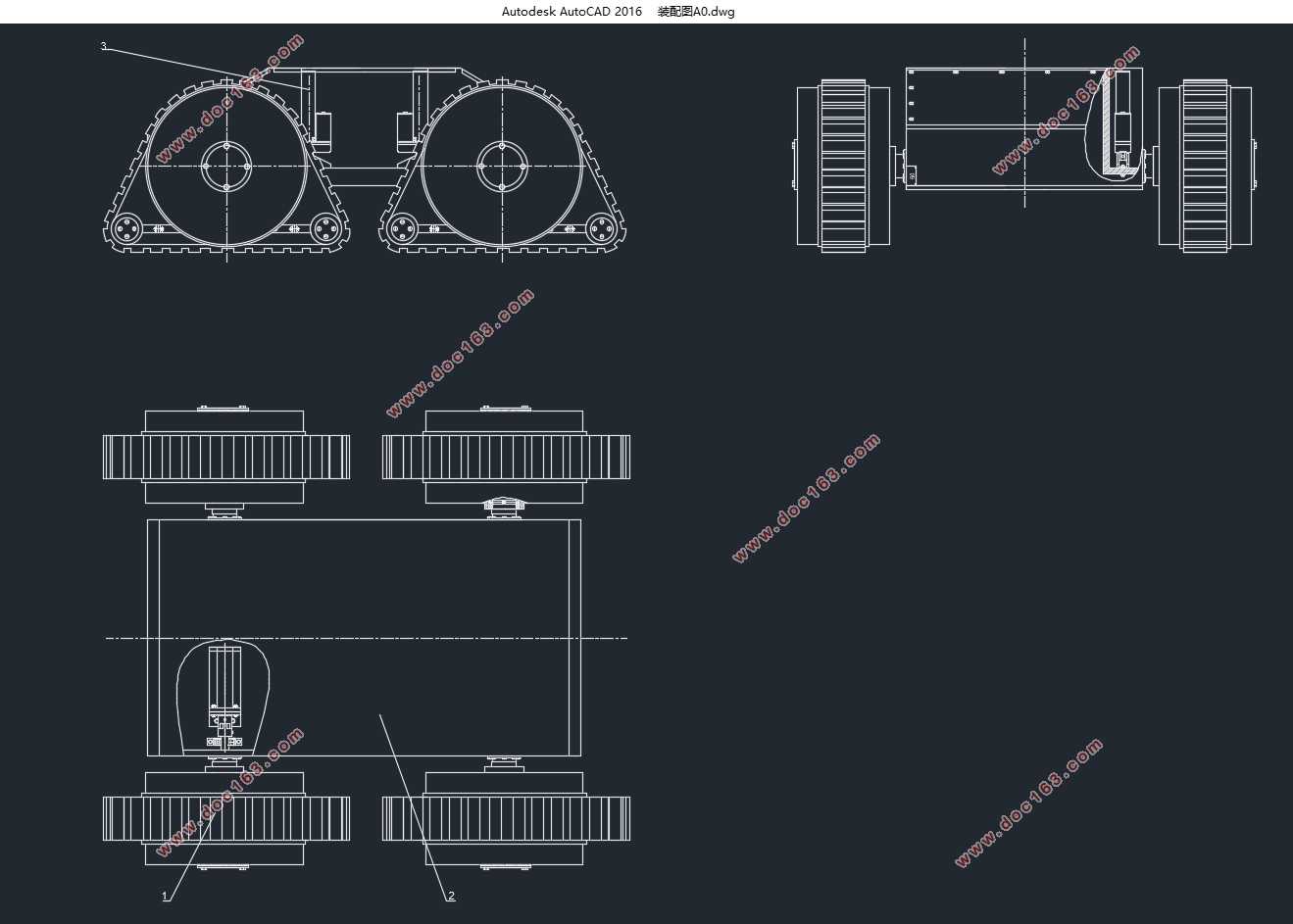
本文设计了一种可变换状态的智能消毒机器人的移动机构,这种移动机构可以实现轮式移动和履带移动的互相变换,在平地上时,机器人可以用轮式移动机构进行快速移动。当遇上障碍物或者阶梯时,机器人可以切换为履带式的移动机构,这样机器人的越障能力就会大大提升。该移动机构采用了弹性履带和变换轮的结构,通过轮体内部的伸缩机构可以将履带变换为三角形状或者圆形的轮式结构,这样的形态不仅提高了消毒机器人的工作效率,也可以有效降低机器人的生产成本。
关键词:轮式;履带式;移动;设计
 [资料来源:http://Doc163.com]
[资料来源:http://Doc163.com] 
目录
摘要 1
ABSTRACT 2
第一章关于智能消毒机器人的背景介绍和机器人技术的发展历程 4
1.1对于智能消毒机器人存在的社会背景和原因介绍 4
1.2对于近代以来智能消毒机器人的国内外科技发展历程 4
1.3本文针对智能消毒机器人需要做的主要工作方向和研究内容 6
第二章对于机器人结构的主要部件功能介绍和机器人移动结构的初步方案和方案分析 7
2.1 消毒机器人的主要组成部分的概述和主要组成部分的功能介绍 7
2.2 对于消毒机器人采取的轮式和履带式可变换的复合移动方案的概述和特点介绍以及履带长度的计算 7
第三章.消毒机器人的轮式和履带式可变换的复合移动机构的履带、变换结构的伸缩机构、减速齿轮和动力输出轴的详细的结构设计计算和校验 10 [来源:http://www.doc163.com]
3.1关于机器人履带的不同种类的介绍和履带长度的计算 10
3.2对于伸缩机构工作原理的介绍和伸缩机构的布置 10
3.2.2对于传动机构中螺杆的受力分析和螺杆强度的校验以及螺杆耐磨性的计算和校验 11
3.3对于齿轮系统传统比的计算、和对于齿轮本身结构尺寸的计算、还有对于齿轮强度的校验 15
3.4对于输出轴的受力分析和受力弯矩图绘制以及轴的强度校验 20
第四章对于消毒机器人底盘的功能介绍和结构尺寸的计算和设计 26
总结 28
致谢 29
参考文献 30
[版权所有:http://DOC163.com]
上一篇:大型车辆右侧盲区碰撞预警及后视镜设计(含CAD零件图装配图,STEP三维图)
下一篇:水陆两用钻取样块机器人结构设计(含CAD零件图装配图)