
叉剪升降式助老轮椅结构设计(含CAD零件图装配图)

叉剪升降式助老轮椅结构设计(含CAD零件图装配图)(开题报告,论文说明书15000字,CAD图10张)
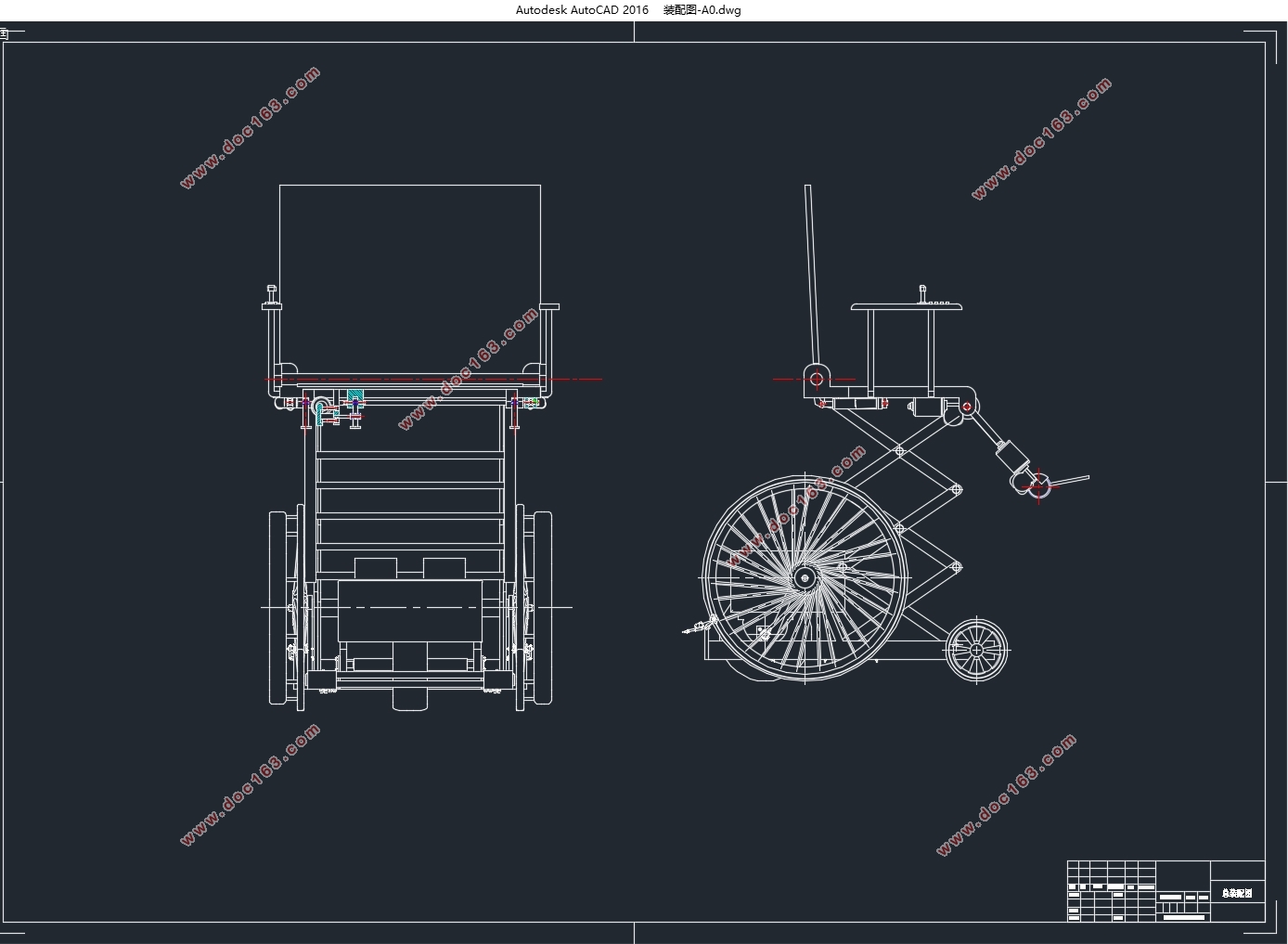
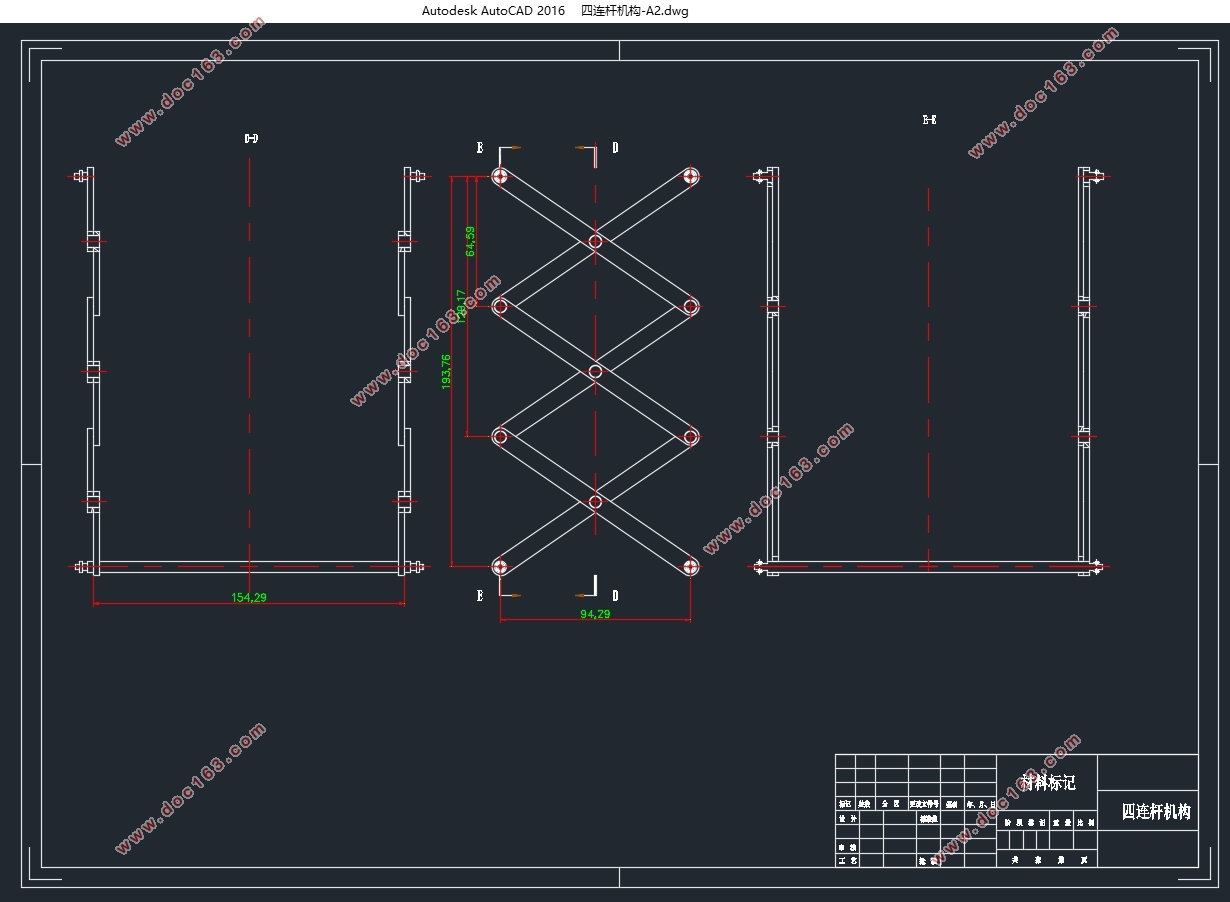
本次设计的主要结构包括行驶结构、平躺机构、升降机构和踏板机构。轮椅的升降机构主要通过四连杆来实现。平躺机构是通过电控机构来实现坐和躺的切换。在轮椅的整体设计过程中,本文主要对行走机构车轮、动力传递和整体的结构做了设计和分析。在传动轴的设计过程中,对轴的材料选择、受力分析、计算和核验、还有轴承的计算选择进行了详细分析。
关键词:轮椅、升降、行走机构、设计
2.1设计要求
本次设计的叉剪升降式电动轮椅,所需要的主要参数是:电动推杆电压为直流24V,额定推力为3500N和8000N,驱动轮直径320mm,万向轮直径200mm,轮椅座位高度550mm。
轮椅采用直流电机驱动,采用电动推杆调节轮椅姿态,结构设计符合人体工程学原理。主要包括行驶机构、平躺机构和升降机构,踏板机构等。
2.2设计方案
根据下表中的数据,先要确定电动轮椅的外宽尺寸。再根据国内人体的主要尺寸,提高了轮椅靠背的整体高度,也相当于增加了电动轮椅的总高度,增加高度以后可以保证使用者在使用轮椅过程中不会发生任何危险。
表2-1 电动轮椅车外形尺寸的国家标准单位mm
[资料来源:http://doc163.com]
室内型、室外形 道路型
总长1 ≤1200 ≤1600
总宽b ≤700 ≤750
总高h ≤1090 ≤1150
根据上表的内容,再结合轮椅的实际用途,本文设计的轮椅尺寸为:长700mm(正常坐姿下),宽600mm,高为1370mm。
本轮椅主要机构可分为踏板机构,升降机构,行驶机构和平躺机构。通过轮椅的各个机构相互配合来实现轮椅拥有的功能。平躺机构可以完成靠背的摆动;踏板机构可以控制脚踏板的摆动。升降机构可以完成座椅的上升与下降。行驶机构可以完成前后,直线,转弯行驶,底盘处用来连接机构,安放电池,控制器等装置。本次设计主要通过电机的旋转与电推杆来完成设计所需要的各项功能。

目录
摘要 1
ABSTRACT 2
第一章绪论 4
1.1引言 4
1.2国内外发展现状 6
1.3主要研究内容 7
第二章总体设计方案 9
2.1设计要求 9 [来源:http://www.doc163.com]
2.2设计方案 9
第三章机械结构设计 10
3.1底盘结构 10
3.2靠背机构和踏板机构 14
3.3升降机构 18
3.4 本章小结 21
第四章控制系统 22
4.1 控制系统的设计 22
4.2本章总结 24
第五章传动机构的设计 26
5.1拟定传动方案的任务 26
5.2选择传动机构类型 27
5.3选择电动机 27
5.4传动装置总传动比和分配各级传动比 28
5.5计算传动装置的运动和动力参数 28
第六章齿轮设计 30
6.1选择齿轮材料、热处理、齿面硬度、精度等级及齿数 30
3.2按齿面接触疲劳强度设计 30
3.3确定齿轮传动主要参数和几何尺寸 32
3.4校核齿根弯曲疲劳强度 32
第七章轴的设计 34
7.1轴的功用 34
7.2轴的分类 34
7.3高速轴的设计 34
7.4低速轴的设计 39
总结 45
致谢 46
参考文献 47
[资料来源:https://www.doc163.com]
上一篇:小型履带车行走通过性质分析(含CAD零件图装配图,STEP三维图)
下一篇:蛋箱搬运机器人运机器手的设计(含CAD零件图装配图)