
模块式六自由度机器人控制系统设计(含CAD装配图)

模块式六自由度机器人控制系统设计(含CAD装配图)(论文说明书12000字,外文翻译,CAD图6张)
摘 要
近二十年来,机器人技术的发展非常迅速,各种用途机器人在各个领域获得广泛应用。我国在机器人的应用和研究方面与工业化发达国家相比还有一定差距,因此设计和研究各种用途的机器人特别是推广机器人、工业机器人的应用是有现实的意义。
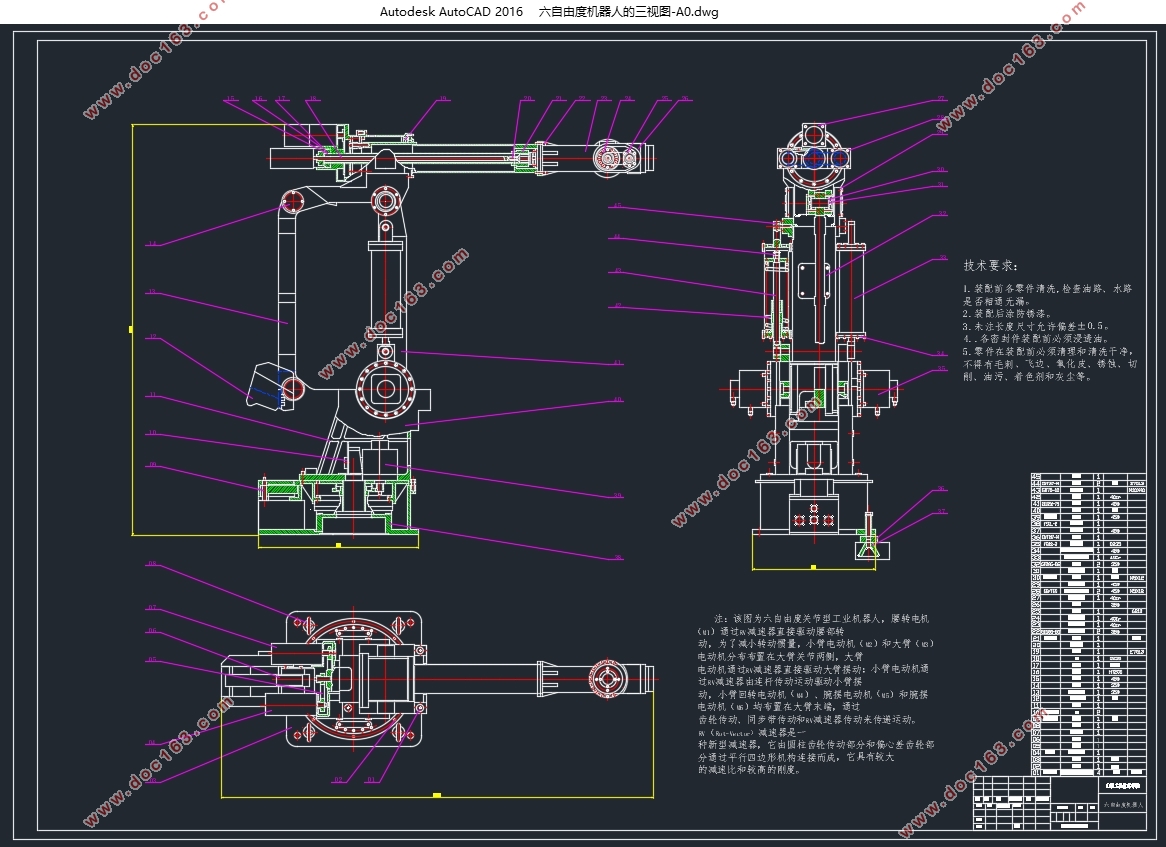
典型的工业机器人例如喷装配机器人、漆机器人、焊接机器人等大多是固定在加工设备旁边或生产线作业的,本论文在参考大量的文献资料的基础上,结合了项目的要求,设计一种小型的、固定在AGV上的、以实现移动的串联六自由度机器人。
首先,针对机器人设计要求提出了多个方案,并且对其进行分析和比较,选择其中最优的结构设计方案;然后进行运动学分析,用D一H方法来建立坐标变换矩阵,推算出运动方程的正解和逆解;用矢量积法推导速度雅可比矩阵,并计算包括腕点在内的一些点的速度和位移;然后借助坐标的变换矩阵进行工作空间的分析。这些工作为移动式机器人的运动控制、结构设计和动力学分析提供了依据。
最后运用已有的六自由度机械手及其手爪的三维造型和装配,将模型导入proteus中,并进行运动学仿真对其结果进行了分析,并且对在机械设计中使用的虚拟样机技术做了尝试,积累了经验。 [资料来源:www.doc163.com]
关键词:6自由度机器人;运动学分析;仿真;步进电动机;单片机;
Control system design of modular 6-DOF robot
Abstract
In the Past twenty years,the robot technology has been developed greatly and used in many different fields. There is a large gap between our country and the developed countries in research and application of the robot technology so that there will be a great value to study,design and applied different kinds of robots,especially industrial robots.
Most typical industrial robots such as welding robot,painting robot and assembly robot are all fixed on the product line or near the machining equipment when they are working. Based on larger number of relative literatures and combined with the need of project,the author have designed a kind of small一size serial robot with 6 degree of freedom which can be fixed on the AGV to construct a mobile robot.
First of all,several kinds of schemes were proposed according to the design demand. The best scheme was chosen after analysis and comparing and the structure was designed. At same time,The kinematics analysis was conducted,coordinate transformation matrix using D一H method was set up,and the kinematics equation direct solution and inverse solution was deduced,the matrix was constructed using vector product method,and the values displacement and velocity of some special point including the wrist point were calculated. Secondly,the working space of the robot was analyzed and the axes section of practical working space was drawn. These works provided a basis to structure design, kinematics and control. [资料来源:http://Doc163.com]
At last do the completion of six degrees of freedom manipulator’s and gripper’s three-dimensional modeling and assembly. models will be imported in proteus, and do the simulation and kinematics, and the simulation result was analyzed. In the experiment,the author tried to use the virtual prototyping technology in mechanism design.
Key words: Six degrees of freedom robot;Kinematics Analysis; simulation;
[资料来源:http://www.doc163.com]
目 录
摘 要 I [资料来源:www.doc163.com]
1 绪论 1
1.1 机器人概述 1
1.2 模块式六自由度机器人概述 1
1.3 主要研究内容 3
2运动学分析 4
2.1 概述 4
2.2 运动学分析 4
2.2.1 空间机构位置的描述 4
2.2.2 空间机构中两任意坐标系的变换关系 9
2.2.3 工业机器人运动学方程 11
2.3 机构的运动学分析 11
2.3.1 机构尺寸参数 11
2.3.2 机构的运动学方程 13
3 模块式六自由度机器人控制系统硬件设计 15
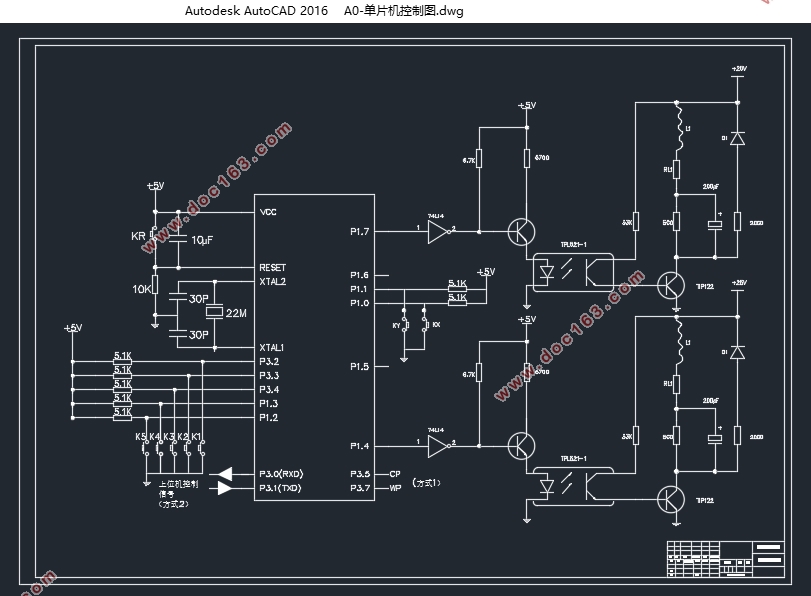
3.1 总体控制方案设计 15
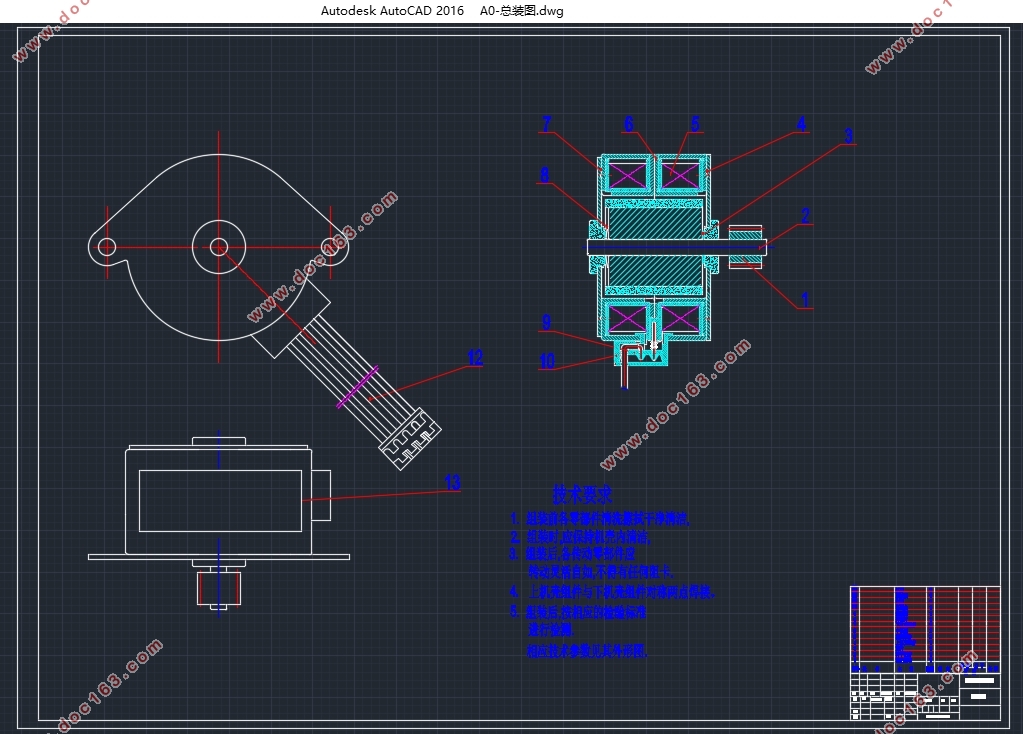
3.2 步进电机选取及控制设计 15
3.2.1 步进电机原理及控制技术 15
3.2.2 步进电机的换向控制 17
3.2.3 步进电机的选取 19
[资料来源:www.doc163.com]
3.3 ULN2003驱动器 20
3.4 单片机的概述 23
3.5 89C51系列控制单片机设计与选择 24
3.5.1 AT89C51简介 27
3.5.2 AT89C51最小系统 31
3.5.3 AT89C51系统设计 32
4 模块式六自由度机器人控制系统仿真设计 35
4.1 仿真软件概述 35
4.1.1 protues简介 35
4.1.2 Keil C51简介 35
4.2 仿真系统设计 35
4.2.1 仿真系统组成 35
4.2.2 仿真系统程序设计 35
4.3 运行调试结果 36
总 结 37
参考文献 38
附录 40
致 谢 64 [资料来源:Doc163.com]
上一篇:立体仓库模拟装置的设计及控制(含CAD接线图原理图装配图)