
轮式智能移动机器人(寻迹避障小车)的设计(含CAD图,SolidWorks三维图)★

轮式智能移动机器人(寻迹避障小车)的设计(含CAD图,SolidWorks三维图)★(论文说明书26000字,外文翻译,CAD图13张,SolidWorks三维图,原理图,代码)
摘 要
循迹避障小车是行走机器人的一种, 这种小车可以适应不同环境, 不受温度、湿度、磁场辐射、重力等条件的影响,在人类无法进入或生存的环境中完成人类无法完成的探测任务,适用于国防及民用等多个领域。
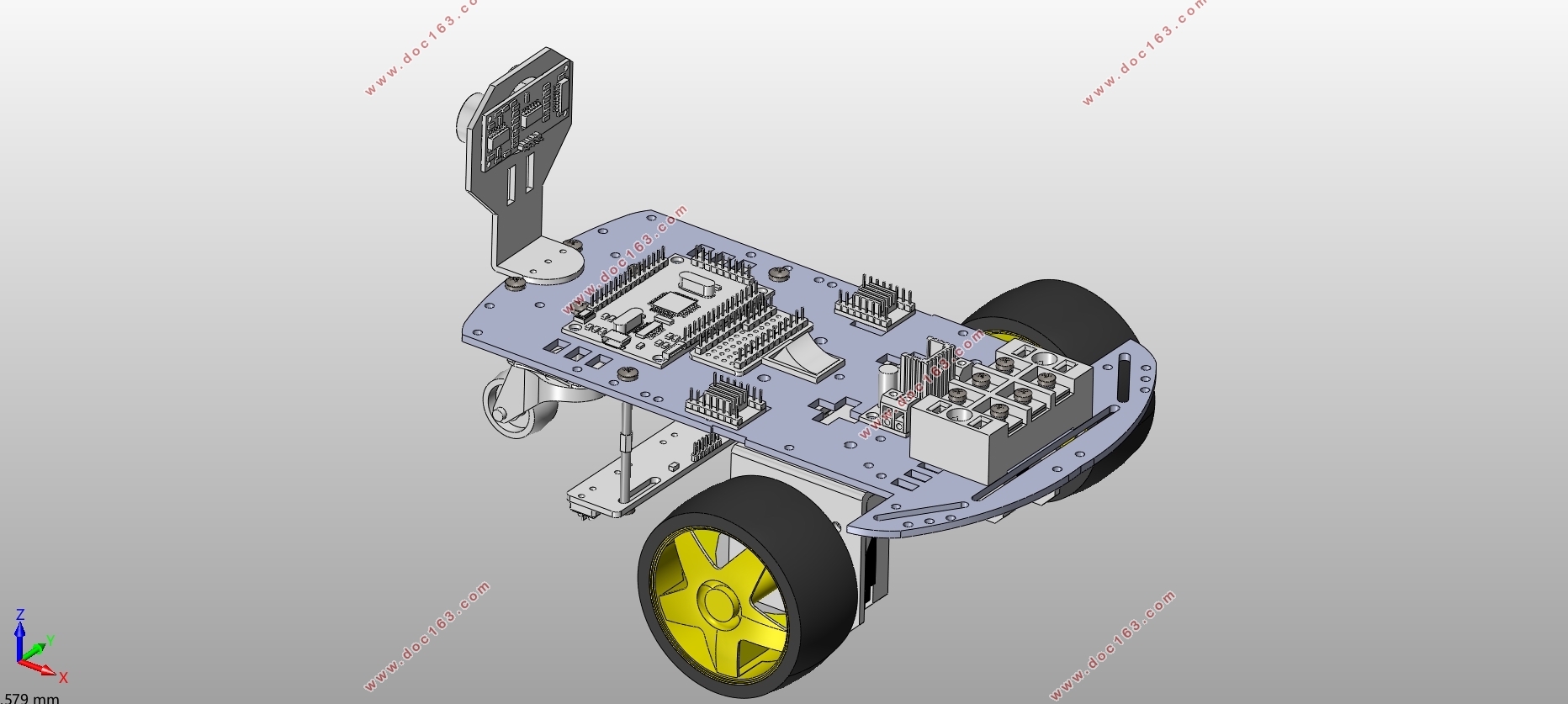
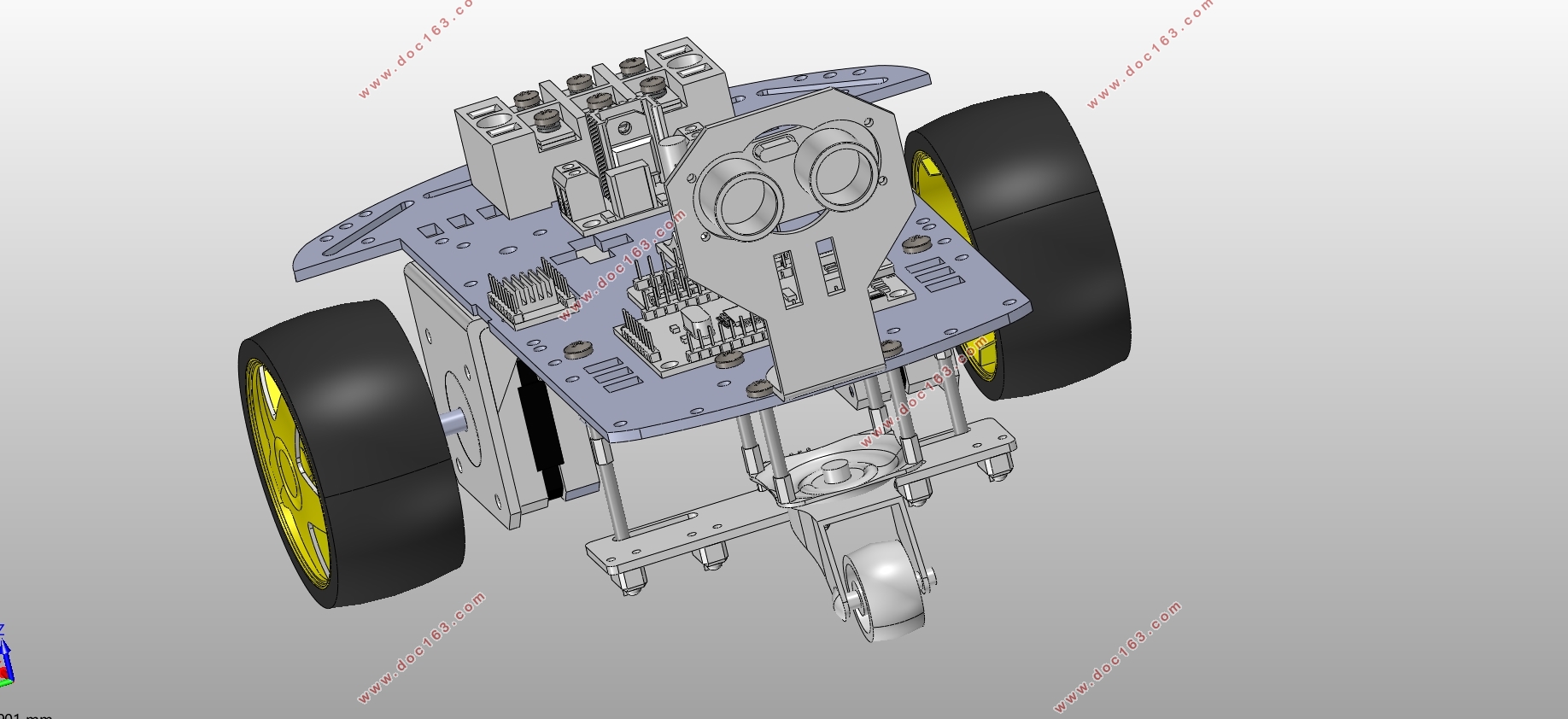
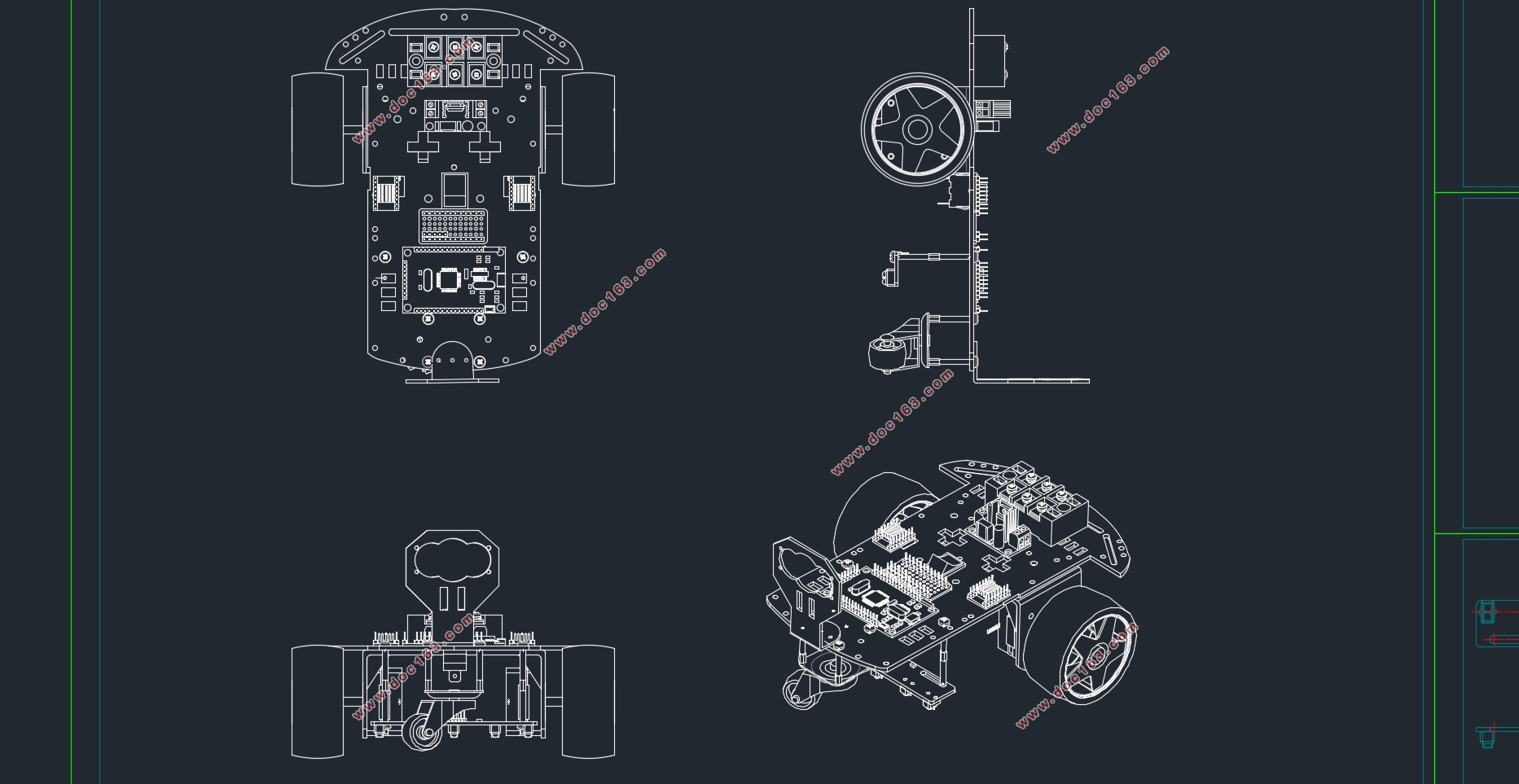
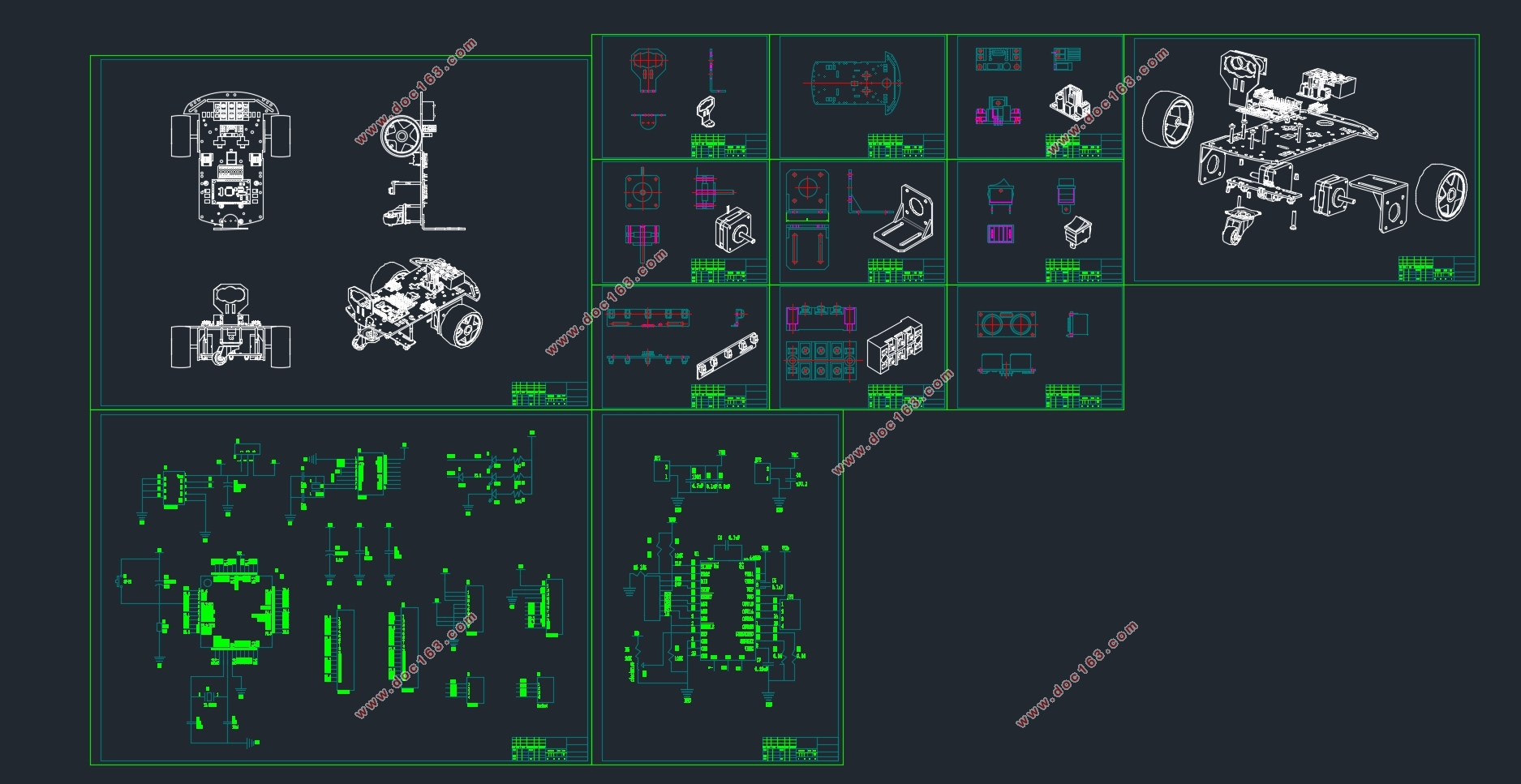
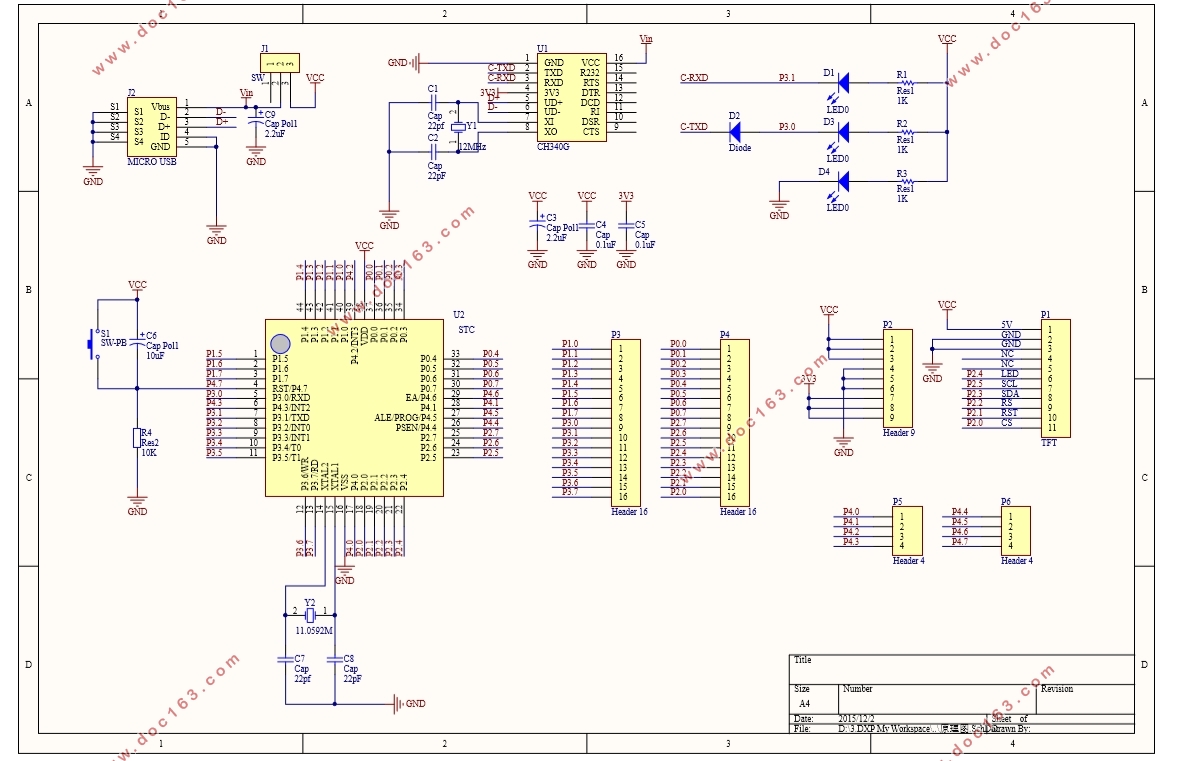
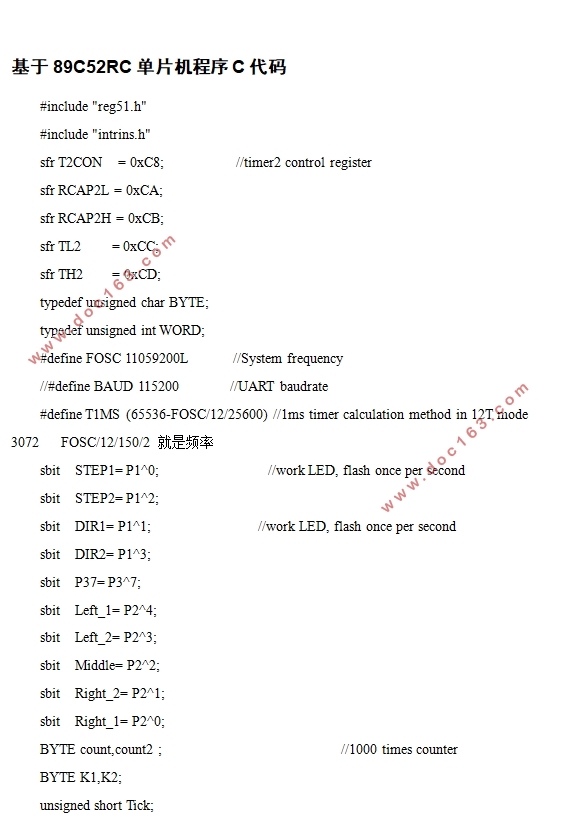
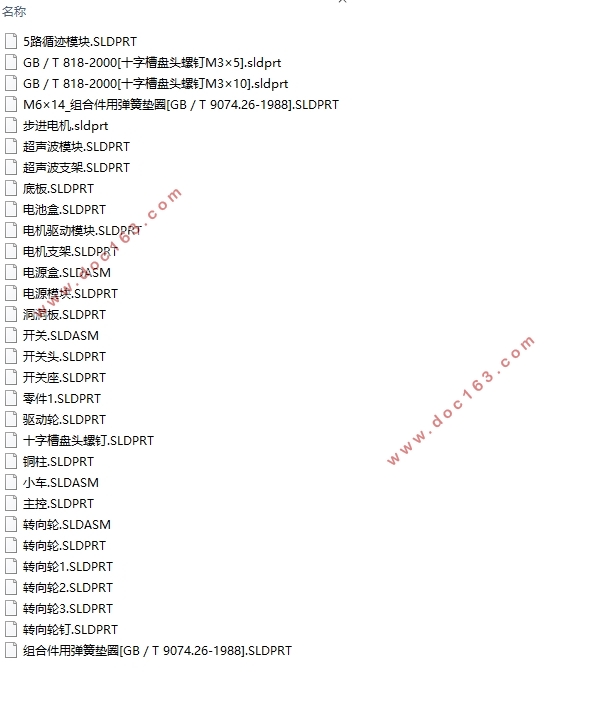
本课题要求采用自行设计制作的轮式智能移动机器人实现自主避障测距与巡线功能。主要任务是设计和实现基于 89C52RC单片机的寻迹避障小车,包括硬件和软件两个部分。硬件电路部分主要包括控制器、循迹电路、避障电路、电机驱动电路等。在轮式智能移动机器人道路信息采集方面,本文采用机器人实验室提供的SRF04超声波测距传感器、 TCRT5000 红外线传感器作为避障传感器和巡线传感器。本课题采用51系列单片机中的89C52RC单片机作为主控制芯片并配有总电压为12V容量为1800mA的充电锂电池及其相应稳压电路来为轮式移动机器人提供能量。在软件编程方面,本文使用C语言在KEIL4.0编译软件上进行避障与巡线程序的编写。在本设计中,系统硬件和软件都采用了模块化结构,整个系统的电路结构简单,可靠性高,在机械结构设计上采用solidwork软件进行三维建模并生成加工图纸。
[来源:http://www.doc163.com]
最终,本课题自行设计制造的轮式智能移动机器人可分别实现自主躲避障碍物功能和循白线行走功能。
关键词:轮式移动机器人;巡线;避障;51系列单片机
The Development and Structure Design of Intelligent Wheeled Mobile Robot
Abstract
Self-tracing and obstacle avoidance electric vehicle is a kind of mobile robot, which is able to adapt various environments, humidity, magnetic radiation and gravity. Consequently the vehicle take the place of human to implement many tasks in the environment where human cannot set foot, which is applicable in many fields in the national defence and civilian.
This subject requires the self-designed wheeled intelligent mobile robot to achieve the function of autonomous obstacle avoidance, ranging and line inspection. The main task is to design and implement the vehicle based on 89C52RC single chip microcomputer, including hardware and software. The hardware circuit includes controller, tracking circuit, obstacle avoidance circuit and motor drive circuit. In terms of road information collection of wheeled intelligent mobile robot, this paper adopts SRF04 ultrasonic ranging sensor and TCRT5000 infrared sensor provided by robot laboratory as obstacle avoidance sensor and line patrol sensor. The wheeled intelligent mobile robot designed and manufactured by ourselves in this topic can realize the function of avoiding obstacles and walking along the white line independently.
Keywords: Wheeled mobile robot; Obstacle avoidance; single chip microcomputer
[来源:http://Doc163.com]

[资料来源:https://www.doc163.com]
 [资料来源:http://Doc163.com]
[资料来源:http://Doc163.com] 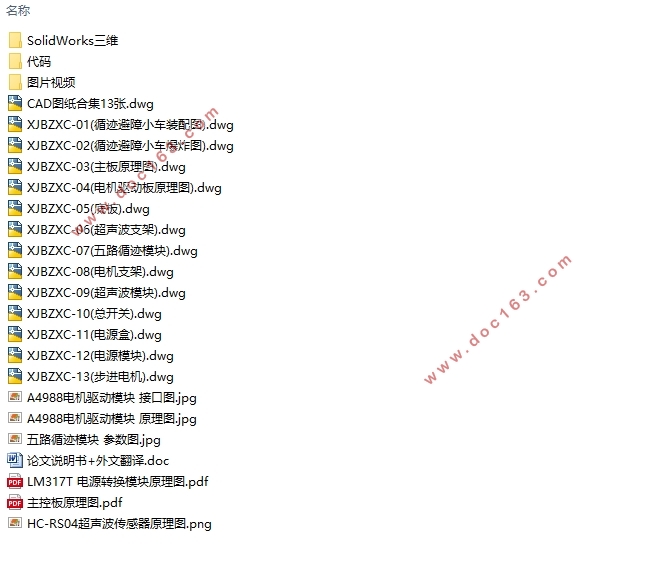
目 录
摘 要 i
Abstract ii
1. 引言 1
1.1. 课题研究的背景 1
1.2. 课题研究的目的与意义 1
1.3. 轮式智能移动机器人发展概况与现状 2
1.4. 设计与开发的主要内容 4
2. 相关技术 7
2.1. 单片机技术 7
2.2. 智能电动小车技术 7
2.3. 红外传感技术 8
2.4. 超声波技术 9
3. 系统方案的分析选择 11
[来源:http://Doc163.com]
3.1. 主控系统选用 12
3.2. 电机模块的选用 13
3.2.1. 电动机的选择 13
3.2.2. 驱动器选择 15
3.3. 供电电源模块选用 16
3.4. 自主循迹和避障方案的选用 17
3.4.1. 自主循迹方案 18
3.4.2. 循迹方案与传感器 18
3.4.3. 自主避障方案 20
3.4.4. 避障方案与传感器 20
3.5. 传感器的选用 22
3.5.1. 超声波传感器 22
3.5.2. 红外线传感器 22
3.5.3. SRF04超声波测距模块 23
3.5.4. 五路巡线传感器模块 24
4. 机械结构的设计与制作 27 [来源:http://www.doc163.com]
4.1. 机械设计的基本要求 27
4.1.1. 对机器整机设计的基本要求 27
4.1.2. 对零件设计的基本要求 27
4.2. 移动机器人车体结构设计原则 28
4.3. 机械结构总体设计方案 29
4.3.1. 底盘结构设计 30
4.3.2. 传感器支架设计 31
4.3.3. 电机支架设计 32
4.3.4. 电机的选型与计算 33
4.4. 机械材料选择 33
4.4.1. 机械材料选用原则 33
5. 硬件电路设计 37
5.1. 微控制器模块 37
5.2. 电源模块 38
5.3. 自主避障模块 39 [资料来源:www.doc163.com]
5.4. 巡线检测模块 39
5.5. 电机驱动模块 40
6. 软件程序的设计 41
6.1. 软件开发平台的选择 41
6.2. 控制软件的设计与实现 42
6.2.1. 概述 42
6.2.2. 软件的结构设计 43
6.3. 循迹模式程序流程图 44
6.4. 避障模式程序流程图 44
7. 轮式智能移动机器人功能测试及效果 47
7.1. 自主避障功能的测试及效果 47
7.2. 自主巡线功能的测试及效果 48
结束语 49
参考文献 51
附录 53
基于89C52RC单片机程序C代码 53
外文资料 63
中文译文 71
致 谢 75
上一篇:TDY型油冷式电动滚筒的设计及冷却油量计算和二轴的加工工艺(含CAD图)
下一篇:基于单片机的清洁机器人设计(含CAD原理图零件图装配图)