
矿井救援机器人结构设计(含CAD零件图装配图)

矿井救援机器人结构设计(含CAD零件图装配图)(论文说明书22000字,外文翻译,CAD图5张)
摘 要
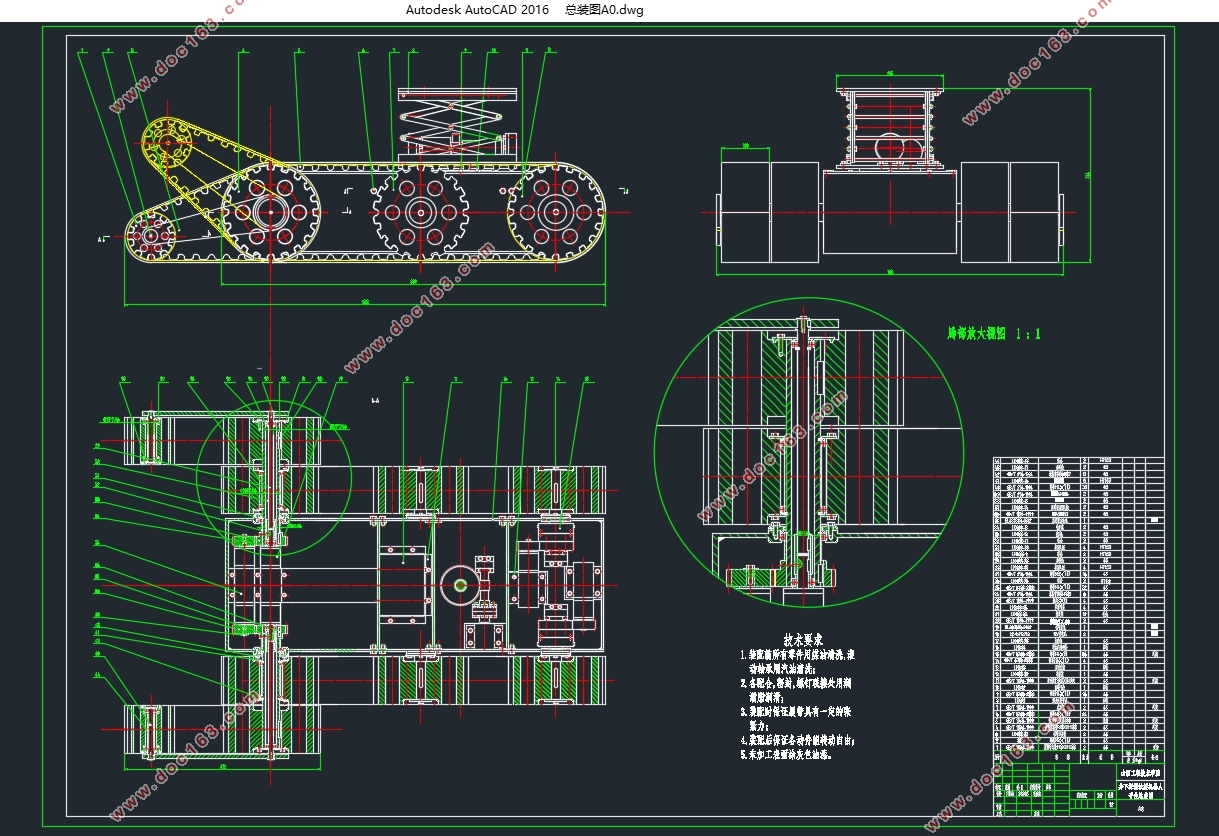
灾害发生之后为了能够尽快地搜救被困人员,人们开发了各种各样的灾害生命搜索定位设备,搜救机器人就是其中的一种。本文详细介绍了履带式复杂地形机器人平台结构的组成。首先对履带机器人移动平台的总体结构进行设计,进而设计了移动平台的驱动部分结构,同时考虑了机器人移动平台的通用性,设计了回转平台结构和升降机构,以便机器人能够适应不同的环境的工作。本文还对驱动系统中间传动机构进行了设计计算和校核。从机器人的行走条件入手,建立其运动模型,对机器人行走系的运动学与动力学进行分析,对运行及越障过程和抗倾覆能力进行分析研究。通过分析计算本设计能够满足设计要求,为下一步深入研究奠定了基础。
关键词: 救援;机器人;履带 ;传动机构
Structure Design of Mine Rescue Robot
Abstract
In order to search and rescue victims in time after a disaster, people have developed kinds of search and rescue equipments, the search and rescue robot is one of them. Its apply of search and rescue robots (SARR), we need to research two problems, one is the rescue strategy, and the other is the development of SARR. They promote the applications and development of SARR together. The most important issue of the strategy to use of search and rescue robot is how to choose the search and rescue robots. By far, kinds of search and rescue robots have been developed by different countries, but there is not a uniform and definite description standard of them,this makes it difficult to select and uce appropriate robot for undertaking the concrete tasks. The research and development of the Mine rescue robot is also one of the focuses of the study Of the current Coal mine rescue .This thesis described constitute of crawler complex terrain robot platform's structure. First this thesis designed the overall structure of mobile platform of robot, further the driven part of the structure of mobile platform. Taking into the mobile robot platform interoperability, designed a rotating platform and organization of ascend and descend to the robot can adapt to the environment. And designed and verified the middle spread to move organization of the drive system. Analyzed the kinematics and dynamics of robot's walking system. Established its campaign model from running conditions, researched on obstacle-crossing and the capability of anti-overturning. The design would provide base for further researching.
[资料来源:http://Doc163.com]
Key words : SAR Robot Track Transmission
1.3.1 本课题的任务要求
本设计的任务是研究履带机器人的移动平台的结构设计,其具体性能指标为:
1.垂直越障高度为0.3m;
2.最大爬坡角度不小于40°;
3.最大进退速度不小于0.5m/s;
4.最大跨沟槽宽度400mm;
5.机器人平台和搭载装置总重不超过40kg。
1.3.2 本课题的研究内容
1.机器人移动平台的总体结构设计;
2.移动平台驱动系统结构设计;
3.回转平台的设计;
4.升降机构的设计;
5.移动平台运动与动力学分析。
[来源:http://Doc163.com]

目 录
摘 要 I
Abstract II
1. 绪 论 1
1.1 研究背景 1
1.2 国内外发展现状 4
1.3 本课题的研究内容 7
1.3.1 本课题的任务要求 7
1.3.2 本课题的研究内容 8
2. 移动平台结构设计 8
2.1 移动平台总体结构设计 8
2.1.1 移动方式的选择 8
2.1.2 总体结构方案的确定 9
[来源:http://www.doc163.com]
2.1.3 履带底盘总体基本尺寸的确定 11
2.2驱动系统结构设计 14
2.3 回转平台的结构设计 15
2.4 剪式升降平台设计 17
3. 驱动系统设计 19
3.1中间传动机构设计计算 19
3.1.1齿轮传动的特点和应用 19
3.1.2 中间级齿轮传动主要参数的确定 19
3.2 驱动轴的校核 23
3.2.1 驱动轴结构设计 23
3.2.2 驱动轮轴受力分析 24
3.2.3 驱动轴强度的校核 26
4. 履带机器人的运动学与动力学分析 29
4.1 履带机器人的运动学分析 29
4.1.1 移动平台运动坐标系的建立 29
4.1.2 运动学模型 29
4.1.3 逆运动模型 31
4.2 移动平台动力学分析 32
4.2.1 移动机器人运动机理研究 32
4.2.2 电机的选择 32 [资料来源:www.doc163.com]
4.2.3 移动平台在正常环境下行驶分析 33
4.2.4 机器人爬坡行驶分析 34
4.2.5机器人越障过程分析 35
4.2.6 机器人越沟槽分析 37
4.2.7 机器人行走抗倾覆状态分析 38
5. 经济技术分析 40
结 论 41
参考文献 42
外文资料 44
中文翻译 49
致 谢 52 [资料来源:www.doc163.com]
上一篇:放顶煤过度液压支架设计(电液控制部分)(含CAD零件图装配图)
下一篇:六自由度气动搬运机械手及其控制系统设计(含CAD梯形图装配图)