
气动机械手回转臂结构设计(含CAD零件图装配图)

气动机械手回转臂结构设计(含CAD零件图装配图)(任务书,开题报告,论文说明书15000字,CAD图纸6张,主程序)
摘 要
本文简要介绍了机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
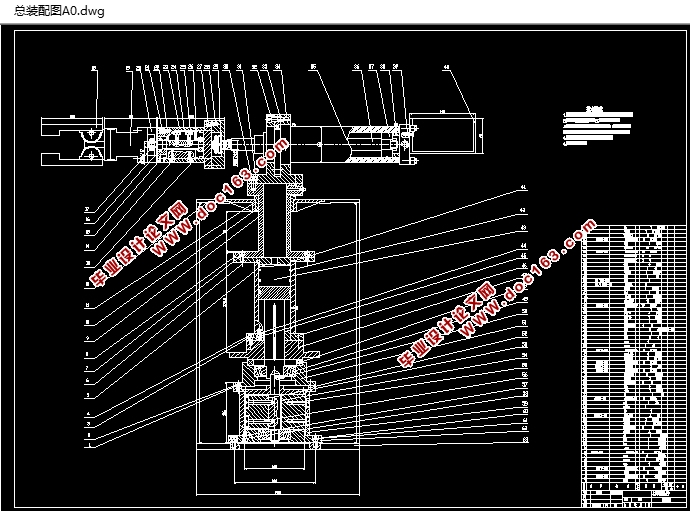
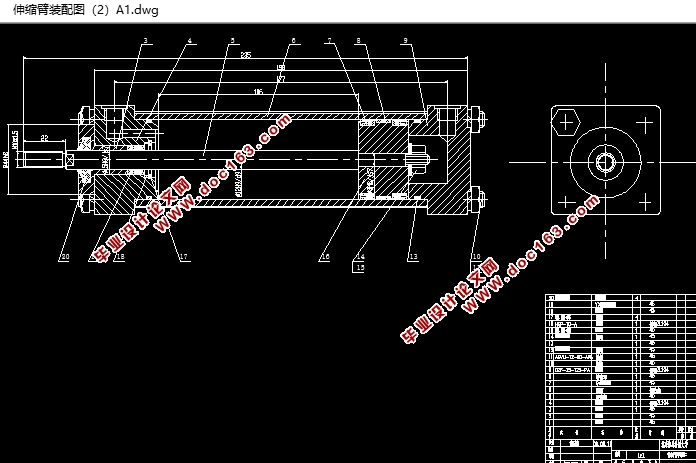
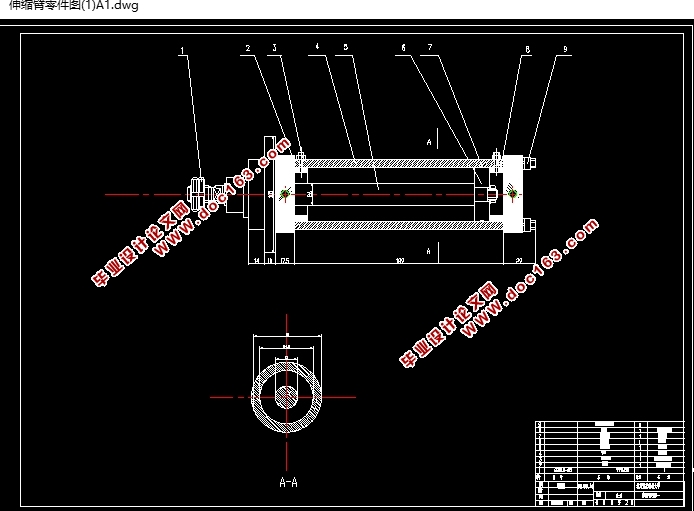
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,计算并设计出了回转气缸、伸缩手臂的机械机构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
利用可编程序控制器对机械手进行控制,根据机械手的工作流程制定了可编程序控制器的控制方案,设计出了人工移动式(无动力)点位示教控制软件,并画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
关键词:工业机器人;机械手;气动;可编程序控制器(PLC);
本课题将要完成的主要任务如下:
(1) 进行气动机械手的总体研究,并进行整体运动方式设计;
(2) 设计气动机械手气路设计,进行关键部件的设计计算;
(3) 设计气动机械伸缩、回转臂部分结构,进行关键部件的设计计算; [来源:http://www.doc163.com]
(4) 人工移动式(无动力)点位示教部分控制软件设计与上位监控系统设计
机械手的设计方案
对气动机械手的基本要求是能快速、准确地拾-放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。设计气动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制.
2.1机械手的座标型式与自由度
按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。由于本机械手在上下料时手臂具有升降、收缩及回转运动,因此,采用圆柱座标型式。相应的机械手具有三个自由度,为了弥补升降运动行程较小的缺点,增加手臂摆动机构,从而增加一个手臂上下摆动的自由度
[版权所有:http://DOC163.com]
目 录
摘要(中文).........................................................Ⅰ
(英文).........................................................Ⅱ
第一章 绪论
1.1机械手概述.......................................................1
1.2机械手的组成和分类...............................................1
1.2.1机械手的组成...............................................1
1.2.2机械手的分类...............................................3
1.3国内外发展状况...................................................4
1.4课题的提出及主要任务.............................................5
1.4.1课题的提出.................................................5
1.4.2课题的主要任务.............................................6
第二章 机械手的设计方案
2.1机械手的座标型式与自由度........................................7
2.2机械手的手部结构方案设计........................................8
2.3机械手的手腕结构方案设计........................................8 [资料来源:http://Doc163.com]
2.4机械手的手臂结构方案设计........................................8
2.5机械手的驱动方案设计............................................8
2.6机械手的控制方案设计............................................8
2.7机械手的主要参数................................................9
2.8机械手的技术参数列表............................................9
第三章 手臂伸缩,回转气缸的设计与校核
3.1手臂伸缩部分尺寸设计与校核......................................11
3.1.1手臂伸缩部分方案一的尺寸设计与校核........................11
3.1.2手臂伸缩部分方案二的尺寸设计与校核........................11
3.1.3导向装置..................................................14
3.1.4平衡装置..................................................14
3.2手臂回转部分尺寸设计与校核......................................14
3.2.1尺寸设计..................................................14
3.2.2尺寸校核..................................................14
第四章 气动系统设计..................................................16
第五章 机械手的PLC控制设计
5.1可编程序控制器的选择及工作过程..................................18
5.1.1可编程序控制器的选择......................................18
5.1.2可编程序控制器的工作过程..................................20
5.2 S7-200的扩展模块...............................................21
5.2.1数字量I/O扩展模块........................................21
5.2.2模拟量扩展模块............................................22
5.2.3通信模块..................................................22
5.2.4功能模块..................................................23
5.3 PLC程序的实现..................................................23
5.4 本程序设计思路.................................................24
第六章 上位界面的设计...............................................27
第七章 结论...........................................................31
结束语.................................................................32
参考文献...............................................................33 [资料来源:http://www.doc163.com]
下一篇:运送铝活塞铸造毛坯机械手设计(含CAD零件图装配图)