
上料机械手结构设计(含CAD图)
上料机械手结构设计(含CAD图)(任务书,论文说明书10000字,文献综述,CAD图纸3张)
摘要
工业机械手是近十几年新兴发展的一个高科技行业,它的发展可谓是突飞猛进,机械手的迅猛发展体现了工业机器人的进步,它的特点是可通过编辑好的程序来完成各种预期的作业任务,在构造和性能上以兼备人和机器的各自优点而独具特色,尤其体现了人的智能和适应性,机器的耐劳性和不具危险的能力,在各大领域的发展前景一片明朗,伴随着工业自动化的发展,出现了数控加工中心,它在减轻工人的劳动强度的同时,大大升华了劳动生产率,但数控加工中常见的上下料工序,习以为常的采用人工操作或传统继电器控制的半自动化装置,前者耗费时间、效率低下、而后者因结构的复杂性,需大量的继电器,接线比较繁琐复杂,容易被车体抖动所干扰,而存在较多的不可靠性、容易发生故障、维修不方便等问题,可编程序操控器PLC控制的上下料机械手控制系统动作简易、线路排列合理、具备很强的抗干扰能力,保证了系统运行的可靠性,降低了维修率,提高了工作效率。机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等,是一门跨学科领域的全面性技术。
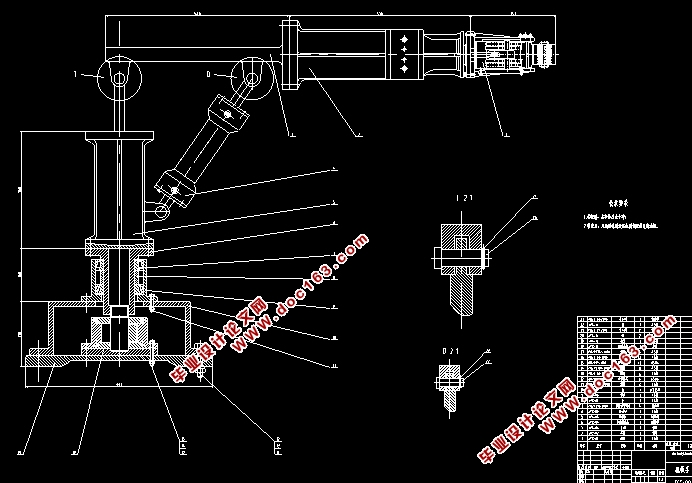
我们设计一台上料机械手,用于输送物料。通过对机械手各主要组成部分(手部、手腕、手臂和机身等)分析,从而确定各主要组成部分的结构,在此基础上对机械手进行设计计算,从而确定装配总图。
关键词: 机械手; 设计; 手部; 手臂; 机身; 结构
Abstract
Industrial manipulator is nearly 10 years emerging development of a high-tech industry, its development is by leaps and bounds, the rapid development of robots reflected the progress of the industrial robot, its characteristic is by editing the homework tasks to complete various expected good programs, to have both humans and machines on structure and performance of their respective advantages and unique, especially reflects people's intelligence and adaptability, the hardiness of the machine and the ability to not hazardous, in each big development prospects in the field of a clear, with the development of industrial automation, CNC machining center, it while reduce the labor intensity of workers, sublimate the labor productivity greatly, but common loading during the n c machining process, habitual use manual or semi-automatic device of traditional relay control, time-consuming, low efficiency, while the latter because of the complexity of the structure, need a lot of relay, compare the complex wiring, easy to interference by body shaking, and there are more unreliability, prone to failure, it is not convenient to maintenance, PLC programmable control device control lines of manipulator control system is up and down movement of simple and easy, have very strong anti-interference ability, reasonable arrangement, ensure the reliability of the system operation, reduce the maintenance rate, improve the working efficiency. Manipulator technology relates to mechanics, mechanical, electrical hydraulic technology, automatic control technology, sensor technology and computer technology, etc., is an interdisciplinary field of comprehensive technology.
[来源:http://www.doc163.com]
We design a manipulator on stage, used for conveying materials. Through to the manipulator's main part (the hand, wrist, arm, and the fuselage, etc.), to determine the main component of the structure, on the basis of design for the manipulator is calculated, which determine the general assembly.
Key words: Manipulator; design; hand; arm; fuselage; structure
[资料来源:Doc163.com]

[资料来源:Doc163.com]
目 录
第一章引言 1
1.1机械手简介 1
1.2 机械手的分类 3
第二章上料机械手的设计 5
2.1机械手的整体结构设计 5
2.2机械手的手部结构设计 5
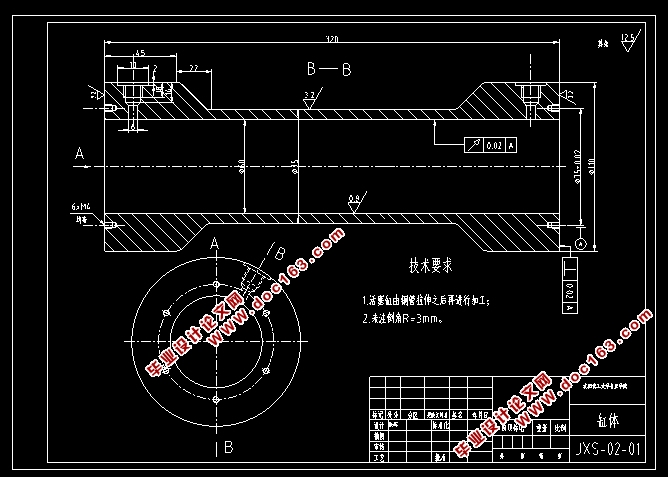
2.3机械手的手臂结构设计 7
2.3.1缸筒内径的设计 8
2.3.2缸筒壁厚的设计 8
2.3.3缸筒壁厚的验算 9
2.3.4活塞杆校核计算 10
2.3.5缸盖螺钉的计算 10
2.3.6其他元件的确定 11
2.3.7摆动缸校核计算 11
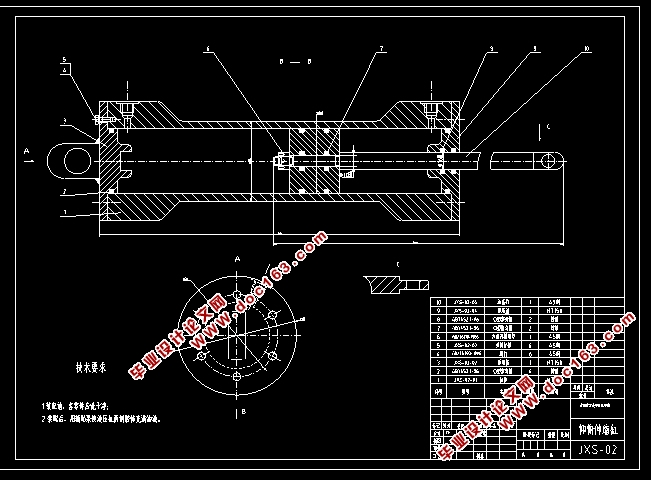
2.4机械手的仰俯缸结构设计 13
2.4.1缸筒内径的设计 14
2.4.2缸筒壁厚的设计 14
2.4.3缸筒壁厚的验算 15
2.4.4活塞杆校核计算 16
2.4.5缸盖螺钉的计算 17
2.4.6大小力臂机构数据计算 18
2.4.7其他元件的确定 21 [资料来源:Doc163.com]
第三章液压系统传动方案的确定 22
3.1各液压缸的换向回路 22
3.2调速方案 22
第四章液压元件 23
4.1阀的应用 23
4.1.1压力控制阀 23
4.1.2流量(速度)控制阀 23
4.1.3泵. 23
4.2阀类的选择原则 24
4.3液压系统中的辅助装置 24
结论 26
参考文献 27
致谢 28