
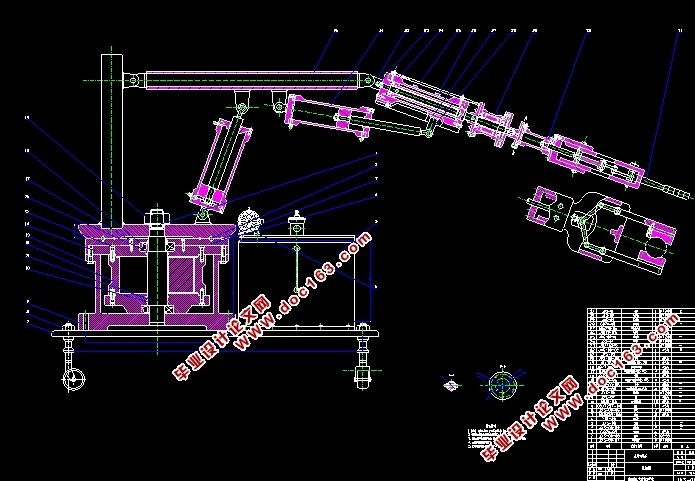
选刀机械手的设计(含CAD装配图)
选刀机械手的设计(含CAD装配图)(任务书,论文说明书9000字,CAD图纸4张)
摘要
在现在的制造业当中,有很大一部分都是从国外引进的机械加工设备,比如,有一些数控机床等。还有一些事吧好多机床一起结合起来的加工中心,这样就可以代替以前的劳动力制造,在减少工作强度,加快工作进度方面有了显著的提高,但是吧,由于这些设备大部分是在国外引进的,所以说一般价格都是比较的昂贵的,所以这不得不促使在国内涌现出一批设计人员,来实现提高效率减少劳动力的目的,类似与这种设计,在现在国内是特备的受到制造业老板和大批制造业人员的欢迎的。
因此,我联想到是不是可以在普通的机床上面装上一个上料的机械手,这样至少在理论上是可以节省很多时间的,既可以减少工人的劳动强度,又可以加快工作的进度。这都是因为机械手是一种模仿人体运动的一种机械设备,是可以按照事先设计好的运动轨迹进行工作的一种自动化的机械设备,对于工业的发展起到了重要的作用,机械手之所以如此的受到欢迎,也是因为其具有这些强大的功能。
随着工业的发展,良好的机械手工具是大势所趋,这样可以提高效率,还可以减少劳动强度,可以较多的避免工人从事单一劳动产生厌倦,促使工人的工作积极性增加,而且,机械手还可以在工作环境恶劣的情况下进行,比如超低温,超高温,深水,等一些环境不好的地方进行工作,所以对比与人工的优越性,机械手在以后的发展中是具有良好的优越性,并且是有良好的发展前景的。
关键词:机械手;自动化;劳动强度;效率
Abstract
In China, many industrial ligament developing productivity high precision machining equipment imported from abroad, such as CNC lathe, milling machine, etc, and have several function of machine together in processing center, etc. In this kind of CNC machine greatly enhanced the work product machining accuracy, speed and reduce the labor intensity of work, so popular. But this kind of equipment, the introduction is also very expensive, so many domestic enterprises in the technical personnel of the original old machine, to improve productivity and reduce labor intensity,industrial automation, this kind of improvement is also very popular.
[来源:http://www.doc163.com]
I think for ordinary led by a set of machine design on the manipulator, to reduce feeding time, reduce labor intensity. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role. The powerful vitality and the extensive attention by people, and welcome.
Industrial robots can replace the hand of heavy labor, reduce labor intensity. Industrial production often appears in the heavy work frequently, if not drab robots that labor intensity is high, sometimes even with employees, driving speed greatly retard, this kind of circumstance using manipulator is very effective. In addition, it can be in high temperature, temperature, the universe, reflective and other toxic, environmental pollution condition on the operation. More show its superiority, has broad prospects.
Key words: machine hand; robotization fatigue strength; productiveness
[来源:http://Doc163.com]

目 录
第一章引言 1
1.1 执行机构 1
1.2机械手的系统工作原理及组成 1
1.2.1 手部 2
1.2.2手腕手臂 2
1.2.3立柱 2 [资料来源:http://Doc163.com]
1.2.4行走机构 2
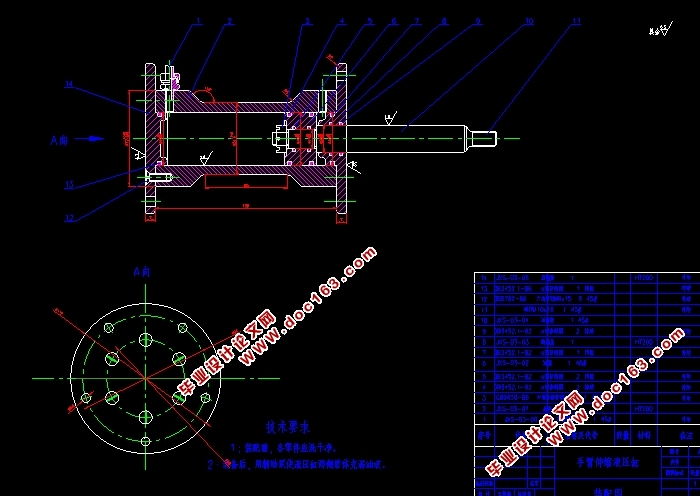
第二章液压缸 3
2.1 液压缸的选定 3
2.1.1 单活塞液压缸缸筒内径的计算 3
2.1.2 缸筒壁厚的计算 3
2.1.3 缸筒壁厚的验算 4
2.1.4 液压缸活塞杆的确定及校核 6
2.2 液压缸其它元件的确定 7
2.2.1 缸盖的材料 7
2.2.2 活塞的材料 7
2.2.3 密封圈的选择 7
2.2.4 油口接头的确定 7
第三章摆动缸的选定 9
3.1 连接部分的设计 9
3.2连接部分材料的选定与连接方法 10
第四章支小臂液压缸的确定 11
4.1 支小臂液压缸的摆动角度确定 11
4.2 支小臂缸的受力分析 11 [资料来源:http://Doc163.com]
4.3.1 液压缸的活塞杆的确定 12
4.3.2 液压缸内径的确定 12
4.3.3 液压缸缸筒壁厚的计算 13
4.3.4 缸筒壁厚的验算 13
4.3.5 活塞杆的最大行程 15
4.3.6 缸筒与端部焊接 16
4.4 缸盖螺钉的计算 16
4.5液压缸其它元件的确定 17
4.5.1 缸盖的材料 17
4.5.2 活塞的材料 17
4.5.3 密封圈的选择 18
4.5.4 管接头的确定由公式 18
第五章大臂回转缸的设计 19
5.1 回转缸的受力分析及内径的确定 19
5.2 动片螺钉的选择 20
5.3 缸盖螺钉的计算 21
5.4 回转缸的其它元件 22 [版权所有:http://DOC163.com]
第六章底座的设计 24
6.1 底座材料及尺寸的选定 24
6.2 底板螺栓的确定 24
6.2.1受翻转力矩的螺栓组连接 25
6.2.2缸盖螺钉的计算 25
第七章液压系统传动方案的确定 27
7.1各液压缸的换向回路 27
7.2 调速方案 27
第八章液压系统原理图 28
总结 30
参考文献 31
致谢 32
[资料来源:Doc163.com]