
平板搬运机械手设计(含CAD零件图装配图,SolidWorks三维图)
平板搬运机械手设计(含CAD零件图装配图,SolidWorks三维图)(开题报告,论文说明书15000字,CAD图纸19张,SolidWorks三维图)
摘 要
在我国迅速崛起的电子商务领域中,我国传统的人工物流模式难以应对目前迅速增长的货运量,限制了我国物流业甚至电子经济的发展。因此研发平板搬运机械手来替代效率低下的传统人工作业很有必要。平板搬运机械手需能自主检测到货堆中货物的所在位置,根据位置信息控制机器人的执行机构进行拣选即拆零动作,完成自动化作业。
本文简述了平板搬运机械手在国内外的发展历程、趋势和科研成果,并根据仓库中的实际情况设计研发一个三自由度机械臂以及末端执行器部位的货物拣选机器人。设计的机器人关节包括底座、可旋转和升降的腰部、三自由度的机械臂、吸盘机械手四部分,吸盘机械手即末端执行夹持器。并且需要对机械臂等提供运动的关键部件进行计算和选取合适的电机以及齿轮。利用使用ProE/Solidworks软件制作该平板搬运机械手的机械臂以及机械手的建立三维模型,由此可以更加直观地对此机器人的运动进行观测和分析,可以用于论文编辑。
关键词:平板搬运机械手设计;三自由度机械臂;密集堆垛货物
课题研究的内容 [版权所有:http://DOC163.com]
用于将密集堆垛货物拆零的平板搬运机械手的机械臂设计及末端执行器的结构设计。针对特殊要求(用于密集堆放的整垛货物),设计研发一套货物拣选机器人,全自动,体积重量较小,功能单一,结构简单,造价低廉,工作持久,操作范围大。机器人关节包括底座和导轮、可旋转的腰部、肘部、手腕和机械手指五部分,机械手指是末端执行夹持器。并且需要对机械臂等提供运动的关键部件进行计算和选取合适的电机以及齿轮[3]。利用使用ProE/Solidworks软件制作该平板搬运机械手的机械臂以及机械手指的建立三维模型,由此可以更加直观地对此机器人的运动进行观测和分析。
平板搬运机械手的设计内容及参数
本设计的搬运机械手主要用于搬运规格:宽250mm×长(300mm~600mm)×厚(6mm~10mm)的铝合金装饰板。
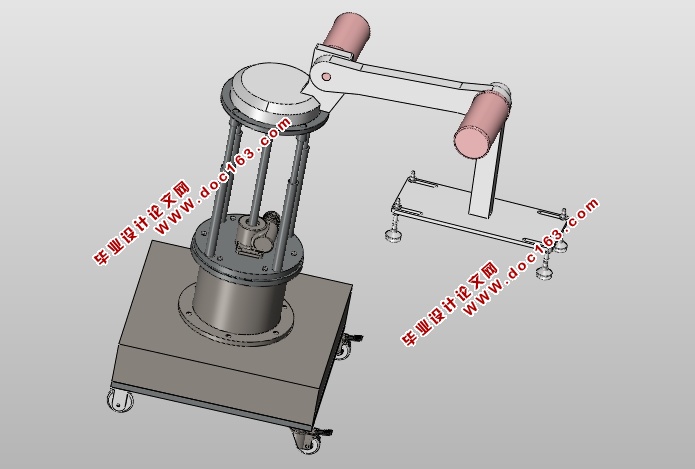
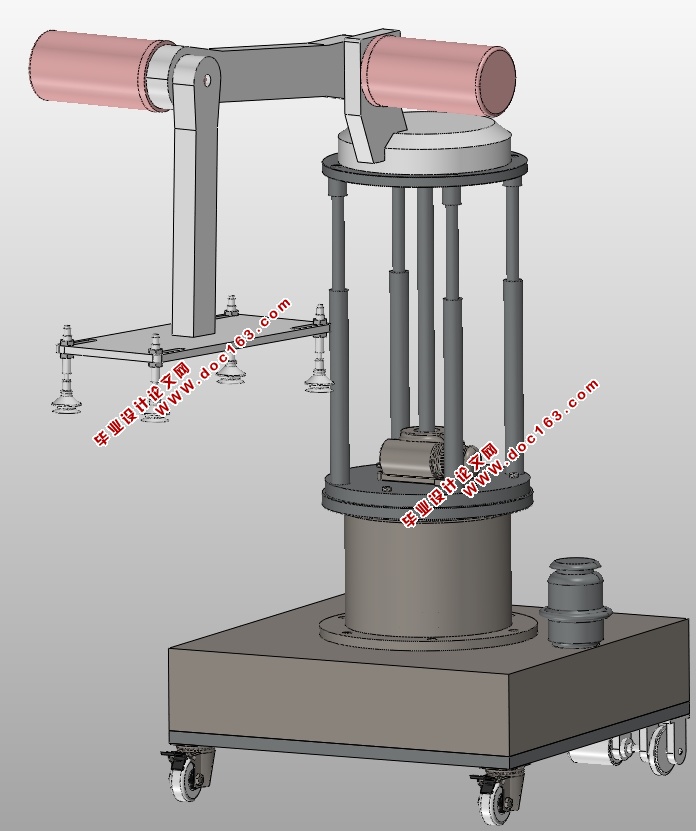
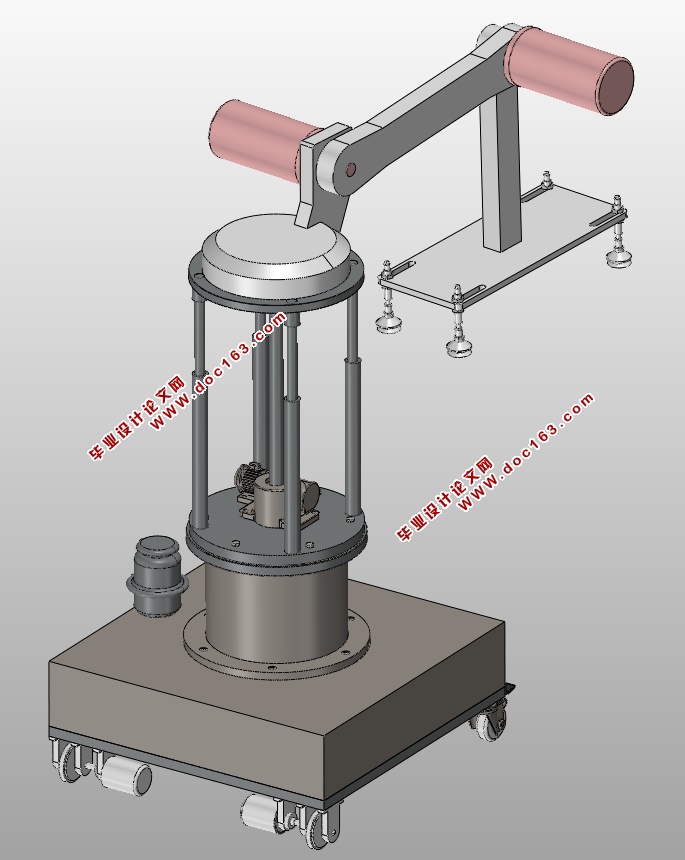
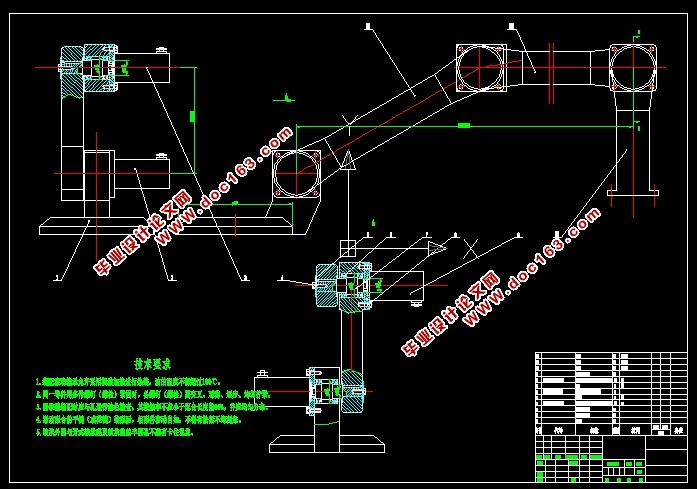
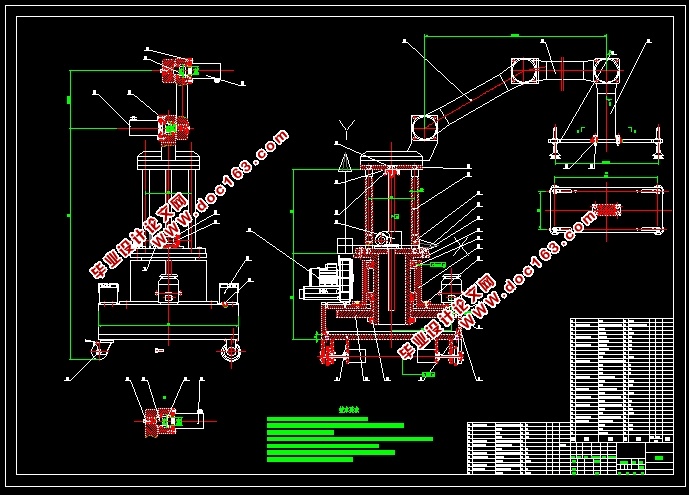
(1)机械手主要由底盘、 立柱、 手臂和吸盘等组成。
(2)横轴、 竖轴是机械手的手臂,分别由电机、减速机驱动, 完成手臂的伸缩和手臂在立柱上的升降高度改变。吸盘夹紧与松开为气动驱动,用于吸取抓取物料。底盘由电动机、减速机驱动,带动整体直线行走。
(3)三维建模。
 [资料来源:http://doc163.com]
[资料来源:http://doc163.com] 
目 录
摘要......................................................................Ⅰ
Abstract..................................................................Ⅱ
第一章 概述...............................................................1
1.1 平板运输机械手的国内外发展历程............................................1
1.1.1平板运输机械手的更新换代..........................................1
1.1.2国外平板搬运机械手实例............................................1
[资料来源:http://Doc163.com]
1.1.3国内平板搬运机械手实例............................................2
1.2本课题的研究内容与研究意义...................................................3
1.2.1课题研究的内容....................................................3
1.2.2课题研究的意义....................................................4
1.2.3课题研究的内容....................................................4
1.3 平板运输机械手的设计内容及参数............................................4
第二章 平板搬运机械手设计机构总体方案设计.................................5
2.1设计难点....................................................................5
2.1.1机器人在仓库中工作时需要的问题....................................5
2.1.2机器人在抓取货物过程中需要的问题..............................5
2.2平板搬运机械手设计的设计要求即参数.......................................6
2.3初步设计方案即其设想.........................................................6
2.3.1设计方案1的设计思想及描述.........................................6 [资料来源:https://www.doc163.com]
2.3.2 设计方案2的设计思想及描述........................................8
2.3.3 两方案对比........................................................8
2.4 本设计方案介绍...............................................................8
2.5 驱动传动的分类介绍和选取.....................................................9
第三章 平板搬运机械手的腰部结构设计及校核................................10
3.1平板搬运机械手的腰部结构简述................................................10
3.2腰部升降结构设计计算........................................................10
3.2.1腰部升降所用零件简述.............................................10
3.2.2相关部件的校核计算...............................................10
3.2.3蜗杆蜗轮机构部件的主要参数即尺寸.................................11
3.3丝杠螺母设计计算............................................................12
3.3.1 确定滚珠丝杠副的导程Ph..........................................12
3.3.2确定当量转速与当量载荷Fm.........................................12
[版权所有:http://DOC163.com]
3.3.3确定预期额定动载荷Cam............................................13
3.3.4确定丝杠最小螺纹底径d2m..........................................13
3.4腰部齿轮回转结构设计计算....................................................14
3.4.1齿轮基本参数设计计算即选定.......................................14
3.4.2对齿面接触强度进行计算 .....................................14
3.4.3对齿根弯曲强度设计计算...........................................16
3.4.4几何尺寸计算.....................................................16
3.5导柱的设计与校核............................................................17
3.6腰部结构设计图..............................................................18
3.7确定电机的型号..............................................................19
3.7.1腰部齿轮回转电机选取.............................................19
3.7.2腰部升降机构的电机选取...........................................19
第四章 平板搬运机械手机械臂、机械手的机构设计及校核.......................20 [来源:http://Doc163.com]
4.1机械臂设计难点及描述........................................................20
4.2确定电机的型号..............................................................21
4.2.1臂1始端的电机选取................................................21
4.2.2臂1、2连接处的电机选取...........................................21
4.2.3臂2、3连接处的电机选取...........................................22
4.3吸盘式机械手的设计计算......................................................22
4.3.1吸盘机械手的结构描述.............................................22
4.3.2吸盘机械手的参数选择.............................................23
4.4底部导轮基本介绍............................................................24
结束语...................................................................25
参考文献.................................................................26
致谢.....................................................................27
[资料来源:Doc163.com]
上一篇:旋转移动式10吨单臂液压起重机起升装置设计(含CAD零件装配图,UG三维图)