
压铸机自动浇注机械手设计(含CAD零件装配图,SolidWorks三维图)
压铸机自动浇注机械手设计(含CAD零件装配图,SolidWorks三维图)(论文说明书14000字,外文翻译,CAD图纸4张,SolidWorks三维图)
Automatic casting machine design for die casting machine
摘要
机械手作为一个代表整个工业的结合体,综合利用机电液三位一体的新系统,超越各自的性能,已经成为各行各业广泛应用的代表。
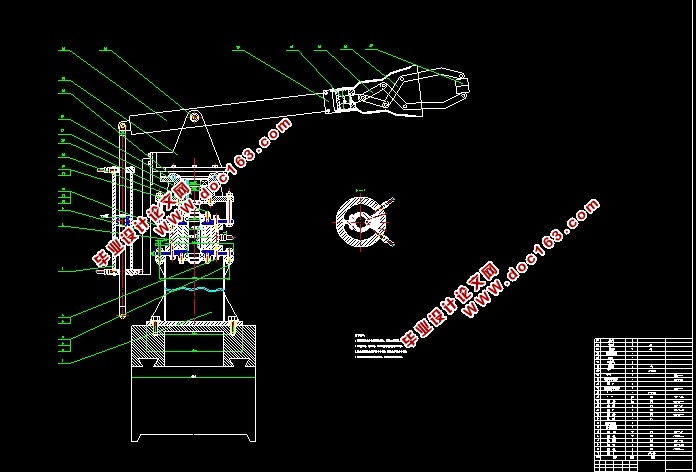
本文针对通用性压铸机机械手进行设计,涉及到机械手零部件的设计,回转机构,升降机构,以及液压系统的设计。 并进行液压系统的设计以及动作顺序表的设计,对回转油缸的设计和校对做出了详细的计算与分析。
最后利用CAD与SolidWorks分别进行二位与三维设计,目的是更加直观的看到机械手工作的特性,能够参与到实际应用中。
关键词:机械手,浇注,液压系统
Abstract
As a combination of the whole industry, the manipulator has become a representative of the wide application of various industries.
In this paper, the design of the mechanical hand of the universal die-casting machine involves the design of the mechanical hand parts, the rotary mechanism, the lifting mechanism, and the hydraulic system design. The design of the hydraulic system and the design of the sequence table are carried out, and the design and proofreading of the rotary oil cylinder are calculated and analyzed in detail. [来源:http://Doc163.com]
Finally, CAD and SolidWorks are used to perform two and three dimensional design respectively. The purpose is to see the characteristics of manipulator work more directly and to automate production.
Keywords: manipulator, pouring, hydraulic system.
2.1原始数据
浇包标准重量 40kg
机身回转角度范围0-180度
手臂升降范围200mm
底座滑行距离1000mm
2.2 工作要求
整个机械手机身,横臂以及手抓有回转副和移动副,因此对整个机械手工作的范围相比于众多运动副的机械结构需要更小的工作空间。
表1
动作 回转 手臂上升/下降 夹紧/放松 底座移动
运动副 回转副 移动副 移动副 移动副
工作过程:
1.1YA两位两通继电器通电,液压系统启动,3作为泄压阀保护整个系统。
2.手臂前伸由螺旋丝杠控制,所以还是1YA继续带电。
3.1YA失电,两位两通继电器关闭,2YA两位四通带电,液压油进入夹紧缸8,推动活塞向右运动,使夹紧缸抓住工件。 [资料来源:https://www.doc163.com]
4.4YA通电,四位两通电磁换向阀右移。液压油从左侧通过进入液压缸,推动活塞向下运动,活塞杆向下运动,完成手臂抬伸工作过程。
5.5YA通电,液压油进入液压缸推动活塞杆向右运动,完成回转工作。
6.3YA通电,电磁阀9左移,液压油从右侧进入,推动活塞杆向上运动,使手臂下降。
7.2YA失电,电磁阀7左移,液压油从右侧进入,推动活塞杆向左运动,手指松开,放下工件。
8.手臂后退也是由螺旋丝杠控制回到原位置。
9.5YA失电,电磁阀13向左移动,液压油从右侧进入,推动活塞杆向左移动,完成机械手整体机身反向回转工作。[9]
[来源:http://www.doc163.com]
目录
摘要 Ⅰ
Abstract Ⅱ
1 绪论 1
1.1国内外发展状况 1
1.2 机械手的组成 1
1.2.1执行机构 1 [版权所有:http://DOC163.com]
1.2.2驱动机构 2
1.2.3控制系统 4
1.3 应用机械手的意义 4
2 总方案设计 5
2.1原始数据 5
2.2 工作要求 5
2.3 系统组成 5
2.3.1工作原理 5
2.3.2工作过程: 5
2.3.4各个动作时间设定: 6
2.3.5液压系统原理图: 6
2.3.6液压系统的特点: 7
2.4 总体技术方案 7
2.4.1手部 8
3 手部结构设计 9
3.1 手部结构 9
3.1.1手指的形状和分类 9
3.1.2 设计时考虑的几个问题 9
3.2 手部夹紧液压缸的设计 10
3.2.1夹紧力的计算: 10
3.2.2夹紧缸的设计与计算: 11
4 手腕结构设计 14
4.1 手腕的自由度 14 [资料来源:http://www.doc163.com]
4.2 手腕的驱动力矩的分析 14
4.2.1手腕转动时所需的驱动力矩 14
5 升降,回转液压缸的尺寸设计与校核 17
5.1 平衡装置 17
5.2 手臂升降液压缸的尺寸设计与校核 17
5.2.1概述: 17
5.2.2分类: 17
5.2.3结构: 17
5.2.4工作原理: 17
5.2.5结构图: 18
5.2.6本设计选用液压缸类型: 18
5.3 尺寸设计 18
5.4 尺寸校核 19
5.5 手臂回转液压缸的尺寸设计与校核 19
5.5.1工作特点: 19
5.5.2分类: 19
5.5.3单叶片结构: 20
5.5.4工作原理: 20
5.5.5设计计算: 20
5.6 尺寸设计 20
5.7 尺寸校核 21
6 总体装配图 23
结论: 24
参考文献: 25
致谢 27
附录Ⅰ:外文翻译 28
附录Ⅱ:外文原文 40
上一篇:新型谷物储放系统设计(含CAD零件装配图,SolidWorks三维图)
下一篇:一类模具标准件惯性摩擦焊机床设计(含CAD零件装配图)