
爬壁清洗机器人的设计(含CAD零件装配图,PROE三维图)
爬壁清洗机器人的设计(含CAD零件装配图,PROE三维图)(任务书,开题报告,中期检查表,外文翻译,论文说明书12000字,CAD图4张,PROE三维图)
摘要
随着经济的不断发展和建筑行业的兴起,摩天大楼如雨后春笋般涌现出来。世界上最高的大楼是迪拜的哈利法塔,高828米,楼层共有162层,玻璃幕墙面积达到14.2万平方米。中国修建的最高大楼为上海中心大厦,总高度为632米,玻璃幕墙达14万平方米。这些建筑都是科技的结晶,也是每一个城市的地标性建筑。但是玻璃幕墙在给人们美观享受的同时,也会带来一些清洁上的问题。这些高楼外墙的清洗工作是由人工完成,人工清洗耗费时间长,耗资巨大也非常容易出事故,危险性很高。当机器人技术越来越成熟,高层建筑大多采用玻璃做幕墙时,机器人代替人工进行清洗作业已成为应用趋势。因此,爬壁清洗机器人具有广阔的应用前景和良好的社会效益。
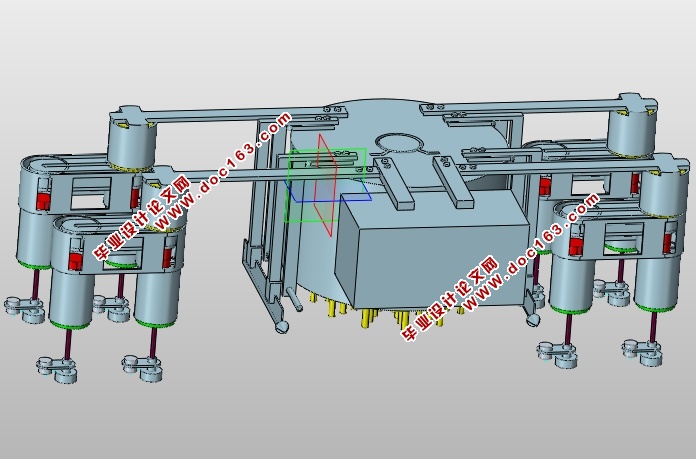
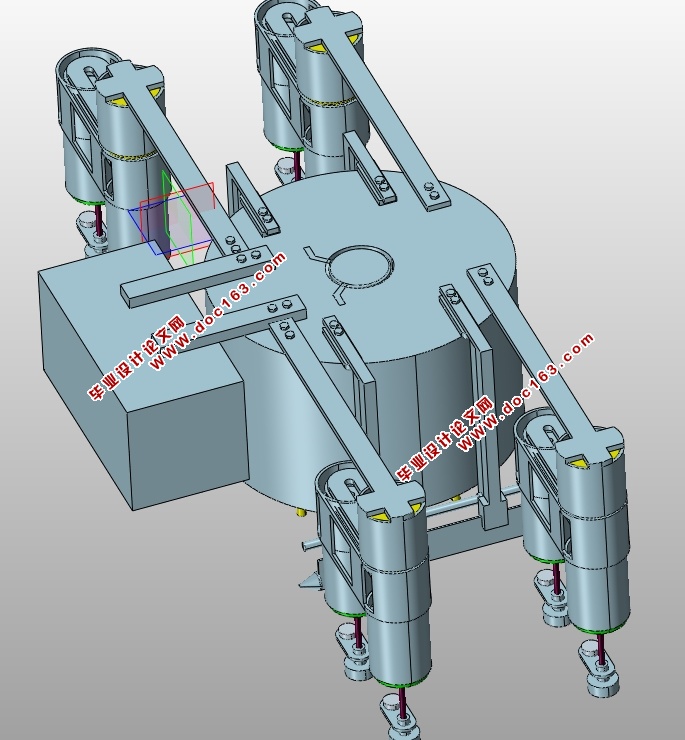
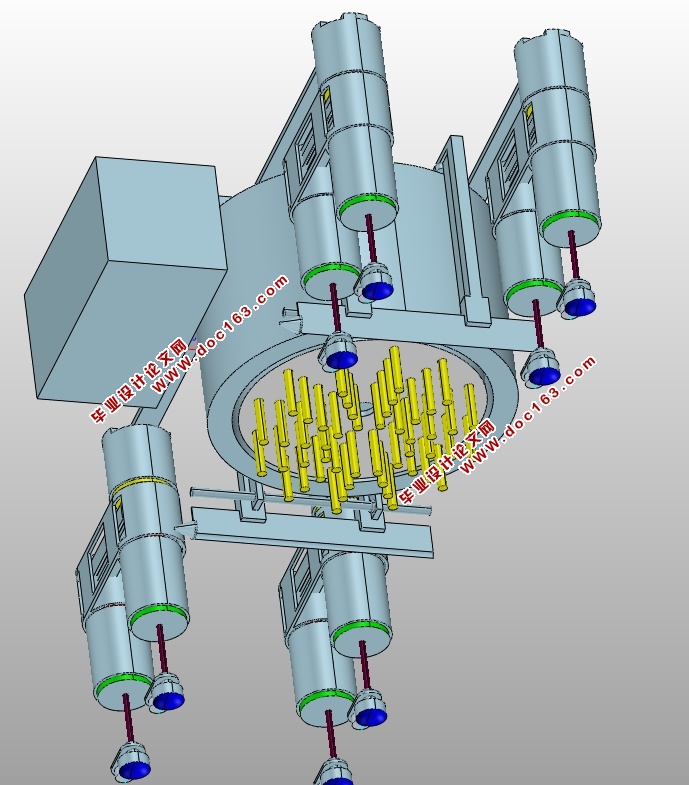
本论文在机器人本体上安装清洗装置,利用吸盘来吸附墙面。驱动方式采用气缸来实现吸盘的抬起和落下,通过两个可以相对转动的吸盘实现移动行走,使玻璃幕墙的清洗过程实现自动化。本文采用Proe来完成机器人的三维图绘制并进行结构主体参数设计。最后,通过PLC进行爬壁清洗机器人控制部分的设计。
[来源:http://Doc163.com]
关键词:爬壁清洗机器人;Proe;PLC
Abstract
With the continuous development of the economy and the rise of the construction industry, skyscrapers have sprung up.The tallest building in the world is Burj Khalifa in Dubai. It is 828 meters high, with 162 floors and 142,000 square meters of glass curtain walls. The tallest building built in China is the Shanghai Center Tower, with a total height of 632 meters and a glass curtain wall of 140,000 square meters. These buildings are the crystallization of science and technology and are landmarks for every city. However, the glass curtain wall will bring about some clean problems while people enjoy it. The cleaning of these high-rise exterior walls is done manually. Manual cleaning takes a long time. It is very costly and accident-prone. The danger is high. When robot technology becomes more and more mature, and high-rise buildings mostly use glass as the curtain wall, robots have become an application trend instead of manual cleaning. Therefore, wall-climbing robots have broad application prospects and good social benefits. [资料来源:Doc163.com]
In this paper, a cleaning device is installed on the robot body, and a sucker is used to adsorb the wall surface. The driving method adopts a cylinder to realize the lifting and falling of the sucker, and the movable walking is achieved through two suckers that can relatively rotate, so that the cleaning process of the glass curtain wall is automated. This paper uses Proe to complete the three-dimensional drawing of the robot and design the main parameters of the structure. Finally, the design of the control part of the wall-climbing robot is performed through the PLC.
Keywords: Wall climbing cleaning robot;Proe; PLC
1.4.1爬壁清洗机器人的爬壁系统的设计
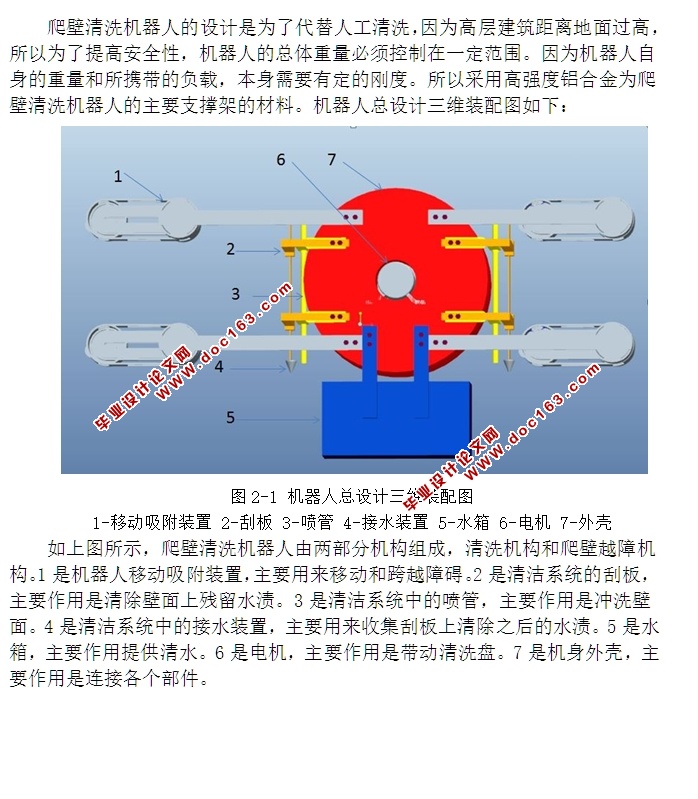
爬壁机器人根据爬壁方式可分为吸盘吸附爬壁机器人、磁吸附爬壁机器人、飞翔式爬壁机器人、绳子牵引式爬壁机器人、粘着剂吸附式爬壁机器人。由于幕墙的多种多样,就会出现玻璃墙面高低不一的情况,会有一点凸起的瓷砖或者挡板,所以机器人的爬壁系统需要有一定的越障功能。通过对机器人吸盘位置的设计、直径的计算、吸附方式设计、跨越障碍物高度设计等设计出一种简单方便的爬壁系统。
1.4.2爬壁清洗机器人的清洗作业系统设计
爬壁清洗机器人清洗作业系统中有喷雾冲洗、清洗盘刷洗、刮板刮洗、水循环回收等设计,喷雾装置既可以冲刷壁面,清洗盘可以大面积清洗,刮板对水回收利用,这套清洗系统能有效的清洗幕墙壁面,并且加大清洗效率。
1.4.3爬壁清洗机器人的控制系统设计
本次设计采用的是PLC来进行爬壁清洗机器人的控制,因为PLC的操作简单,便于控制,PLC需要对该款机器人进行吸盘脱离、吸盘吸附、电机正传、电机反转、清洗顺序等控制。

目录
1 绪论 1
1.1 选题背景及意义 1
1.2国内外研究现状与发展趋势 1
1.2.1国外研究现状与发展趋势 1
1.2.2国内研究现状与发展趋势 3
1.3高楼清洗爬壁机器人存在的问题 3 [资料来源:http://doc163.com]
1.4 研究内容 4
1.4.1爬壁清洗机器人的爬壁系统的设计 4
1.4.2爬壁清洗机器人的清洗作业系统设计 4
1.4.3爬壁清洗机器人的控制系统设计 4
1.5本章小结 5
2 爬壁清洗机器人总体方案 6
2.1 设计准则与要求 6
2.2爬壁清洗机器人行走越障机构设计 6
2.3 爬壁清洗机器人清洗装置设计 7
2.4 本章小结 8
3 爬壁清洗机器人清洗机构的设计 9
3.1滚刷装置的设计 9
3.2清洗液的喷洒和循环装置设计 10
3.3水泵的选择 12
3.4本章小结 13
4 爬壁清洗机器人爬壁越障机构的设计 14
4.1爬壁清洗机器人驱动方式 14
4.2吸附装置的设计 14
4.3机器人跨越障碍和路径规划 16
4.4气缸运动部分 17
4.5本章小结 18
5 爬壁清洗机器人控制部分设计 19
5.1 PLC的概述 19
5.2 PLC的I/O口分配 19
5.3 PLC选型 20
5.4 PLC梯形图 20
5.5本章小结 21
参考文献 1
致 谢 2
附录A 装配图和零件图 3
附录B 外文翻译 7 [资料来源:Doc163.com]
上一篇:水果采摘装置设计(含CAD图,IGS,SolidWorks三维图,有限元分析)