
主动适形越障机器人的设计与特性分析(含CAD零件装配图)
主动适形越障机器人的设计与特性分析(含CAD零件装配图)(任务书,开题报告,中期检查表,外文翻译,论文说明书12000字,CAD图3张)
摘要
主动适形越障机器人是一种能够变换自身姿态从而通过不同类型障碍的机器人,被人们广泛应用于危险作业领域,能够代替人们进入到不能进入的地方、者环境搜救、帮助特警反恐、排爆等作业,减少或者避免了对救援人员不必要的损伤。因此,主动适形越障机器人的研究具有有很重大的意义。首先,本论文通过查阅国内外研究现状和主动适形越障机器人的需求分析,分析比较现有主动适形越障机构的优缺点,设计出一种具有合理尺寸、结构简单、实用性强以及良好越障能力的主从复合式越障机构。首先,针对主动适形越障机器人进行总体机构设计、传动机构设计、主要零部件设计,并针对各结构主要参数设计进行尺寸计算和验证。其次,采用Creo2.0软件进行主动适形越障机器人的三维建模和仿真分析。
关键词:履带式;越障机器人;Creo2.0
Abstract
Active conformal obstacle-obscuring robot is a kind of robot, which is widely used in dangerous operation fields that can change its posture to pass through different types of obstacles. Moreover, It also can replace people into inaccessible places, environmental search and rescue, special police against terrorism, expel explosives as well. Such operations reduce or avoid unnecessary damage to prevent workers from dangers. Therefore, the research of active conformal obstacle-obscuring robots is worthy to be implemented. First of all, this paper not only discusses the research status at home and abroad and shows analysis of active conformal obstacle-obscuring robots, but also analyzes and compares the advantages and disadvantages of existing active conformal obstacle-obscuring mechanisms. At the same time, it designs a reasonable size, simple structure and strong practicality. A master-slave compound obstacle-surpassing organization with good obstacle avoidance capabilities. Above all, the overall mechanism design, transmission mechanism design, and main component design for the active conformal obstacle-obstrusive robot are carried out. Besides, the size calculations and verifications are performed for the design of the main parameters of each structure. Next, the three-dimensional modeling and simulation analysis of the active conformal obstacle-obstacle robot is implemented with Creo2.0 software.
[资料来源:Doc163.com]
Keywords: crawler; Obstacle robot; Creo2.0
[资料来源:www.doc163.com]

目录
第1章 绪论 1
1.1 研究目的与意义 1
1.2 国内外研究现状 1
1.2.1 国内发展概况 1
1.2.2 国外发展概况 2
1.3 本轮文研究内容 3 [资料来源:http://Doc163.com]
1.4 论文的组织结构 3
第2章 自主适形越障机构方案的确定 5
2.1 几种常见的越障机构分析 5
2.1.1轮式越障机构 5
2.1.2 履带式越障机构 6
2.1.3 腿式越障机构 7
2.2 越障机构的分析比较与选择 8
2.3 越障机构的确定 8
2.3.1 几种常见障碍物的分析 8
2.3.2 机构的确定 9
2.4本章小结 10
第3章 主动适形越障机器人的设计 11
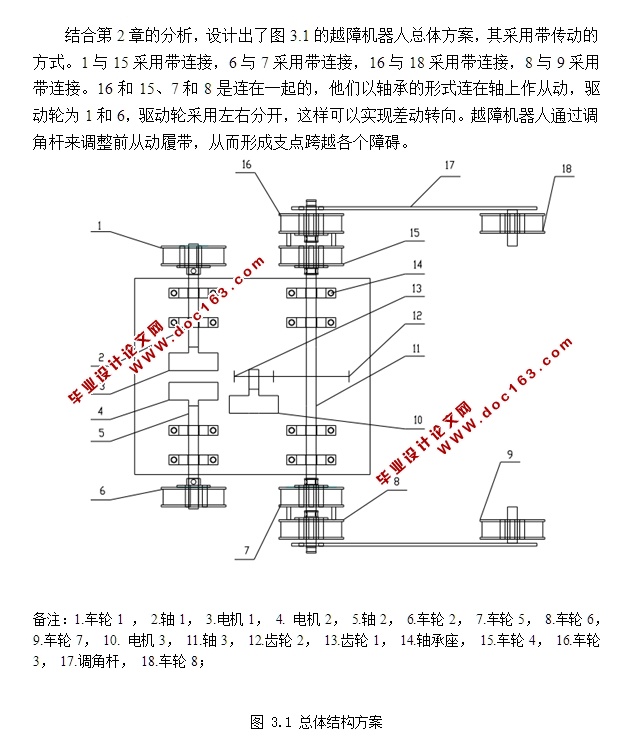
3.1 越障机器人总体机构的设计 11
3.2 传动机构的设计 12
3.3 主要零部件的选择设计 12
3.3.1 轴承的选用 12
3.3.2 步进电机的选用 14
3.3.3 轴的设计 15
3.3.4 轴承座的设计 17
3.3.5 齿轮的设计选用 17
3.4 本章小结 22 [来源:http://Doc163.com]
第4章 主动适形越障机器人的设计验证 23
4.1 齿轮的三维建模 23
4.2 轴的三维建模 26
4.3 轴承座的三维建模 27
4.4 固定套的三维建模 28
4.5 车轮的三维建模 29
4.6 主动适形越障机器人的尺寸装配验证 31
4.7 本章小结 35
第5章 总结 36
参考文献 37
致 谢 38
附录 外文翻译 39 [资料来源:http://doc163.com]
上一篇:果实采摘机械手的设计与仿真(SolidWorks三维图)