
基于全向轮的AGV的移动底盘结构设计(含CAD零件装配图,STEP三维图)
基于全向轮的AGV的移动底盘结构设计(含CAD零件装配图,STEP三维图)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文说明书15000字,CAD图纸6张,STEP三维图,答辩PPT)
Structure design of AGV based mobile chassis based on omnidirectional wheel
[来源:http://www.doc163.com]
摘要
现在加工行业的发展更加智能化,对于现代智能加工系统里面,物流实现自动化就在于自动引导小车的出现。在现代化加工里面,自动引导小车被当做是一种可以移动的机器来,用途比较特别,对于柔性加工还有现代化物流来说,是比较重要的,现在跟它有关的学科学术一直都是在发展的,所以控制技术的发展也是非常快的,现在在很多地方用。
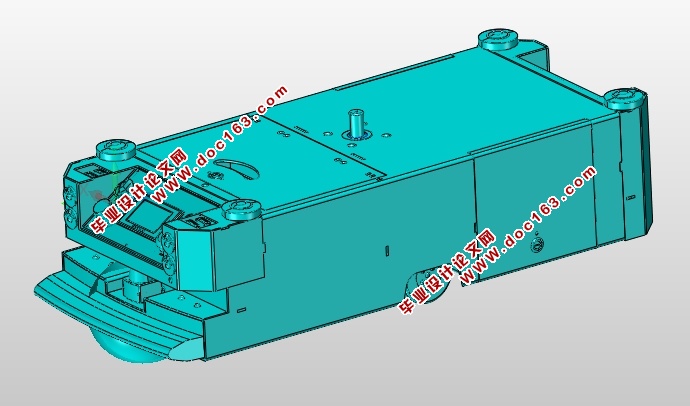
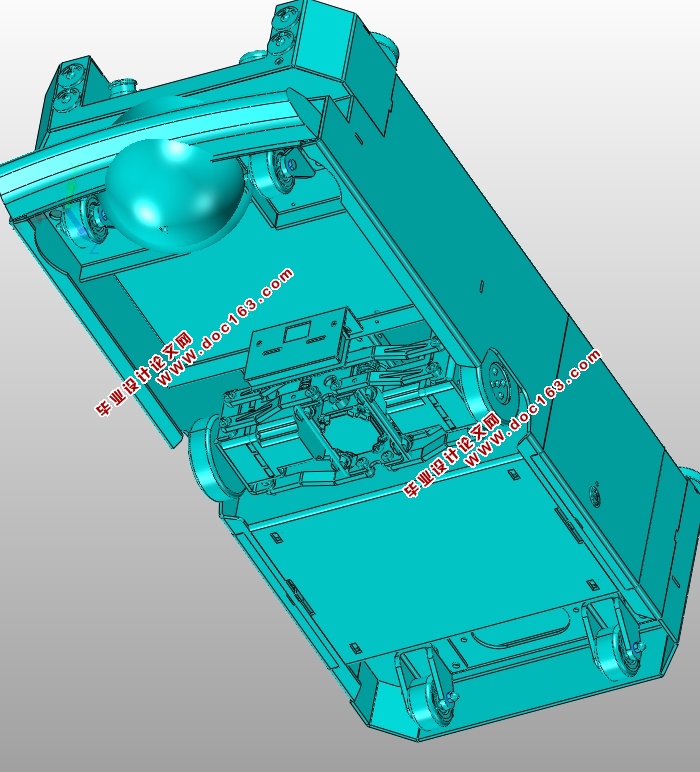
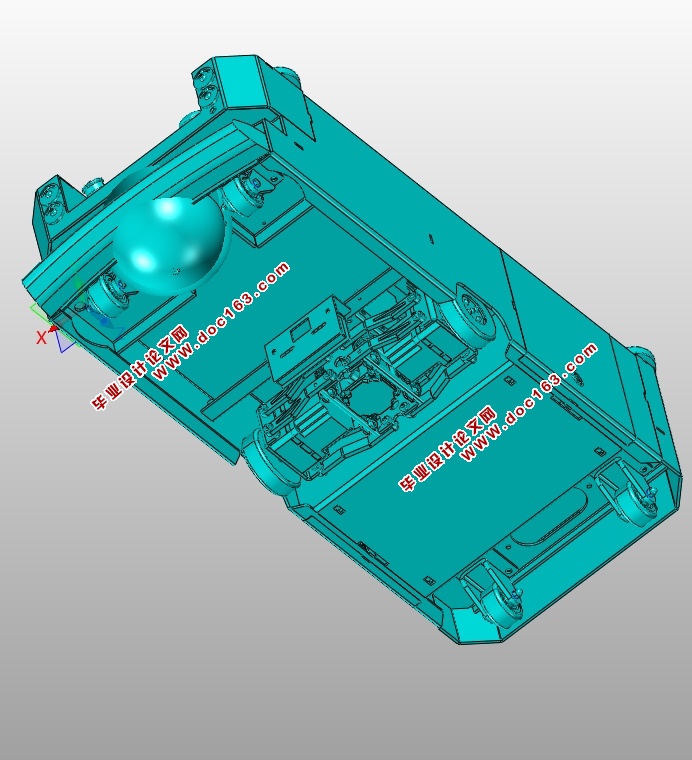
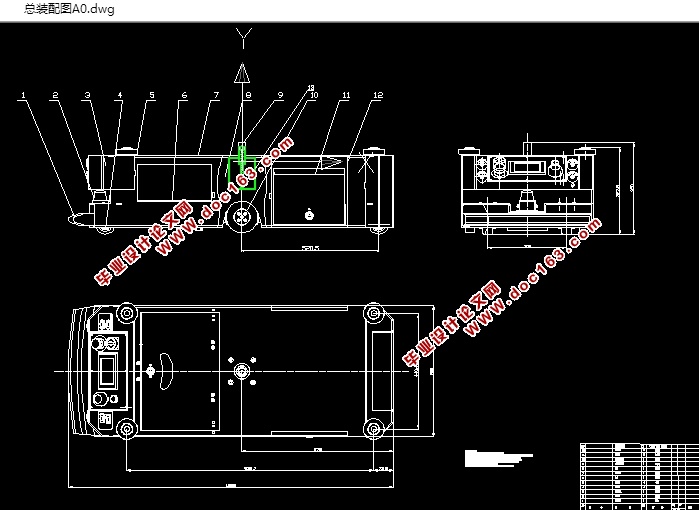
这篇论文设计了全向轮自动引导小车的移动底盘结构,主要进行的工作是对全向AGV的控制系统进行研究,确定电动机,确定传动部分,将激光导航定位系统的原理还有特征都进行了详细的说明。将它里面主要零件进行设计,将数据算出来。确定电动机还有减速器的标准零件。
关键词 全向轮;AGV;移动底盘;设计;激光导航
Abstract
Along with the development of modern manufacturing industry toward intelligent, automatic guided car (AGV) is one of the important automated logistics equipment in modern intelligent manufacturing system. In the modern manufacturing activities, the omnidirectional AGV is the special application of the mobile robot. It is an important part of the flexible manufacturing and modern logistics system. With the continuous progress of science and technology in the related fields, its motion control technology has also been developed rapidly, and will be applied to more and more occasions.
[版权所有:http://DOC163.com]
This article mainly carries on the structural design for the AGV of the omni directional wheel. Its main design contents are as follows: studying the control system of omnidirectional AGV. The motor and transmission mechanism are selected, and the principle and characteristics of the laser navigation and positioning system are introduced. Design and calculate the main parts of the mechanism. Selection and determination of standard parts such as motors and speed reducer.
Keywords omnidirectional wheel AGV mobile chassis design laser navigation
论文里面升降牵引装置的零部件有升降机构固定外壳、升降驱动电机、直杆、直杆连接板、直线轴承模块、凸轮组件、压缩弹簧、弹簧导向轴、直杆连接板导向柱和升降机构总固定板。升降牵引装置在升降装置总固定板还有车体框架上进行连接,并且固定住,将升降驱动电机在升降装置固定外壳的左边外边进行固定,一样的,埋一根弹簧导向轴在升降装置固定外壳的下面,在装置总固定板的反边将直线轴承模块固定在这,并且要确保直线轴承板块跟弹簧的导向轴是同心的,在直线轴承模块的孔里面安装直杆,在直线轴承板块的下面安装直杆连接板,跟直杆固定在一起,直杆是一个空心的,下面可以把压缩弹簧放进去,并且压缩弹簧套在弹簧导向轴里面,弹簧下面跟固定外壳的下面进行焊接,并且固定住,弹簧的上面连接直杆,并且固定起来,将凸轮装在升降驱动电机的输出轴上,这个凸轮的外边在直杆连接板上面的面压着,装了两个极限开关在固定升降驱动电机的一边,在升降驱动电机的上面装上极限开关,在升降电动机的下边安装下极限位置开关,因为升降驱动电机进行转动,凸轮也就跟着转动,在进行转动的时候,上极限位置开关还有下极限位置开关就都被打开了,在这个装置的外面右边还装了直杆连接导向柱,确保直杆连接板不管是上升还是下降都非常顺利。
[资料来源:www.doc163.com]
设计升降牵引部分的有关数据:
升降杆直径:35mm;
电机参数:DC24V直流永磁电机功率30W转动速度最大值2500r/min
工作电压:9-30V;
逻辑电平:高电平3.3-30V,低电平0V;
牵引力:5000N;
升降范围:0-50mm;
升降保护:升降限位开关保护,避免电机被弄坏了
升降速度:速度25mm/s;
工作湿度:10-90%RH;
工作温度:-25℃-+85℃;
防护等级:IP-67;
外壳材质:普通碳钢
对于这个装置来说主要零件就是直杆,可以进行自由升降,所以要对它进行有限元分析,按照前面算的,物流台车上使用的这个直杆,作用力大小是1000N。
经过分析,作用在直杆上的应力最大的地方就是跟直线轴承模块碰到的最下面,因为直杆的弹性变化会有碰撞,还有冲击,那么直杆的下面最边缘的地方应力就非常集中,这样一来直杆就失效了,多以对这个直杆的受力进行分析,防止应力都集中在一起,这样直杆的使用时间就变得更长了。直杆的原材料用的是Q235A,查看机械书本,在一般的情况下, Q235A的屈服强度[σ]=235MPa。
3.5 自动导引车运动参数的确定
牵引方式:潜伏牵引式
导引方式:激光导航 [资料来源:http://Doc163.com]
行走方向:前进行走
驱动方式:双电机驱动
前进速度:最大速度35m/min
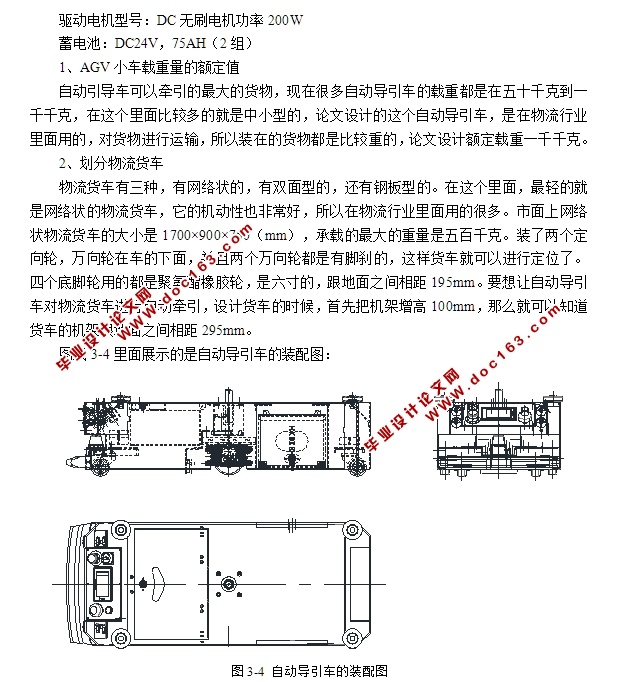
负载能力:1000KG
最小转弯半径:700mm
直线导引精度:±10mm
停止精度:±10mm
驱动电机型号:DC无刷电机功率200W
蓄电池:DC24V,75AH(2组)
[版权所有:http://DOC163.com]
 [资料来源:Doc163.com]
[资料来源:Doc163.com] 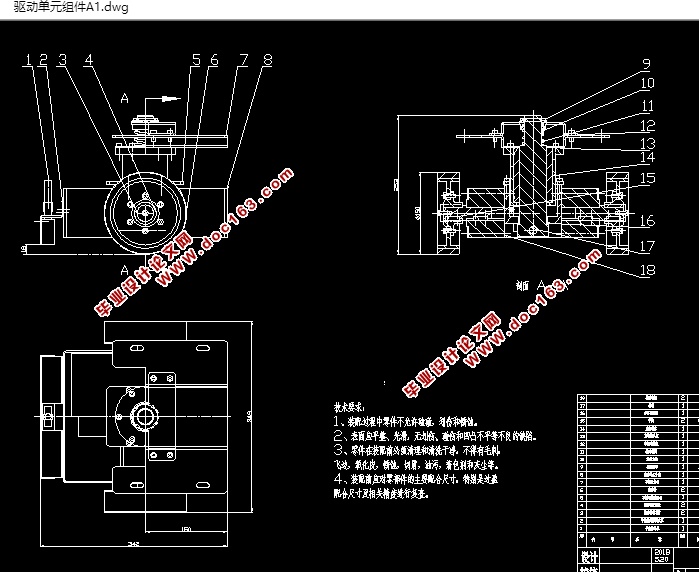
目 录
摘要 I
Abstract II
1 绪论 1
1.1 本课题研究的背景 1
1.2 国内外自动导引车的发展现状 2 [来源:http://Doc163.com]
1.3 本课题研究意义及目的 2
2 自动导引车(AGV)简介 3
2.1 AGV工作原理的概述 3
2.2 AGV的分类及概述 3
3 自动导引车的硬件设计 8
3.1 自动导引车的设计要求 8
3.2 自动导引车的设计 8
3.3 驱动结构的设计 8
3.3.1驱动电机的选型 9
3.3.2驱动电机减速机的选型 11
3.4 升降牵引机构的设计 13
3.6.1AGV小车的车体尺寸的设计 16
3.6.2主框架的设计 17
3.6.3副框架的设计 18
4 激光导航的原理、特点及控制 21
4.1 激光导航的原理及特点 21
4.1.1激光导航的原理 21
4.1.2激光导航AVG的特点 22
4.2 激光导航AGV控制系统简介 22
结论 23
致谢 24
参考文献 25 [版权所有:http://DOC163.com]
上一篇:基于CAD技术的小型上下胶带封箱机设计(含CAD图,CAXA图纸)