
玻璃单面清洗机器人结构设计(含CAD零件装配图)

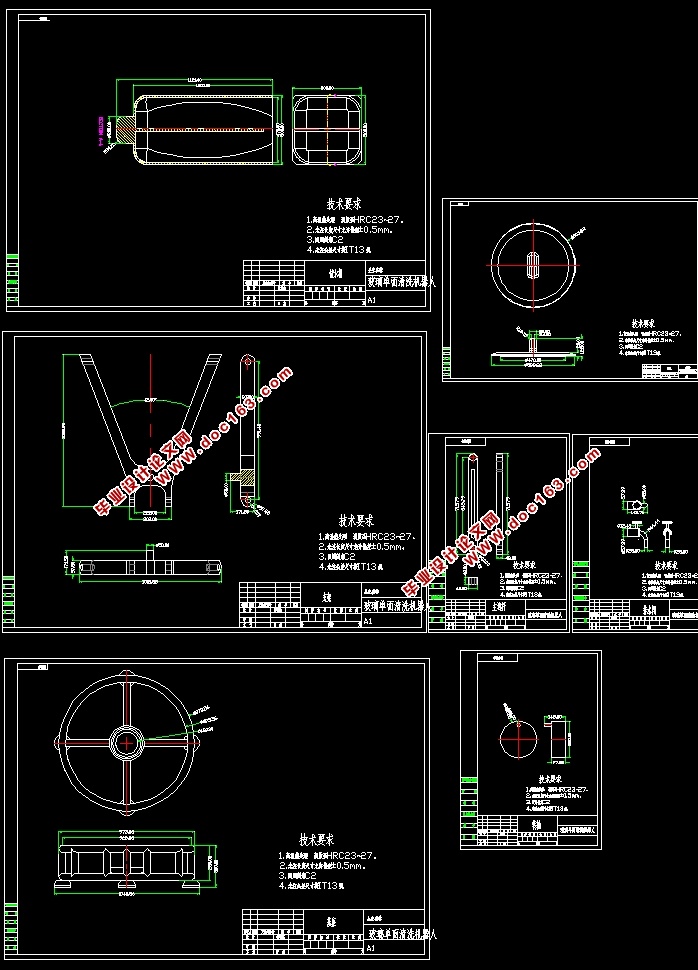
玻璃单面清洗机器人结构设计(含CAD零件装配图)(任务书,论文说明书9500字,CAD图纸7张)
通过分析玻璃单面清洗机器人清洗技术的需求,构思出多个设计方案并进行各方面的的对比和分析,优选出合理的设计方案。设计时充分考虑清洗效率等方面的要求,通过零件材料的合理选择、关键零件的严格分析计算和结构设计,以及整个图纸的严格设计,使该设计满足现有玻璃单面的清洗技术需求,提高工作效率和作业安全性。
关键词: 玻璃玻璃 旋转清洗机构 设计
本设计产品改变了多年以来人工吊拉清洗或一根绳一块板吊人清洗的高危作业现象,实现了机电一体化。结构简单,操作方便,投资小,成本低,安全可靠,工作效率高。一小时大约可清洗墙面400~600m2。
本机器分为清洗装置和升降装置。本设计说明书主要着重于清洗装置部分的清洗机构设计。由于本人能力有限,设计中的错误在所难免,请大家给予批评和指证!
1 方案分析
1.1. 设计要求
结构简单,操作方便;投资小,成本低;安全可靠,工作效率高;一小时大约可清洗墙面400~600m2。
1.2. 方案一 滚动—往复移动式
它的作用原理是驱动电机驱动链(履带)轮的转动,带动上下两滚刷刷洗墙面;同时带动传动丝杆轴的转动,使移动喷嘴往复运动;刮水板刮净剩余水分;整个清洗装置的通过升降机构和自身重量进行上下移动。
1.3 方案二 转动—往复移动式
该装置包括机架,装在机架顶部的喷淋水嘴,清洗机构,横置于机架上的齿条导轨;工作时,减速电机通过链(履带)传动装置带动齿轮轴转动,同时齿轮轴与齿条导轨相互啮合使整个清洗机构通过导向轮的导向作用而在导轨上往复运动(此控制器中有设置在导轨两端上的行程开关);刷具装在主动链(履带)轮轴上。
1.4 方案比较与选择
1.4.1 滚动—往复移动装置优缺点
(1) 结构简单,成本低;
(2) 工作安全可靠,易操作;
(3) 清洗效率高,但效果较差;
(4) 往复移动机构仅为移动喷嘴;
(5) 清洗方向单一,不能彻底清除污垢;
因此,该装置适合污垢较少,易清理的玻璃单面环境。
1.4.2 转动—往复运动装置优缺点
(1) 结构较滚动—往复移动装置复杂些;
(2) 投资小,成本低,安全可靠;
(3) 易操作,但电路设计较复杂;
(4) 刷具能同时作往复运动和转动,清洗方向多面,效果较好; [资料来源:Doc163.com]
(5) 对玻璃单面污垢程度适应性较好;
因方案二能有效清除污垢,且适应性较前者好,优先选用方案二。
[资料来源:https://www.doc163.com]

目录
摘要 4
前言 5
1 方案分析 5
1.1. 设计要求 5
1.2. 方案一 滚动—往复移动式 5
1.3 方案二 转动—往复移动式 6
1.4 方案比较与选择 6
1.4.1 滚动—往复移动装置优缺点 6
1.4.2 转动—往复运动装置优缺点 6
2 材料分析 6 [资料来源:www.doc163.com]
3 设计计算 7
3.1 减速电机的选择 7
3.1.1 电动机类型的选择 7
3.1.2 电动机电压和转速的选择 7
3.1.3 电动机型号规格的选择 7
3.2 减速器的选择 8
3.2.1 按强度选用减速器 9
1传动比要求 9
2计算功率 9
3.3 链(履带)传动装置的设计计算 10
3.3.1滚子链(履带)传动设计的计算 10
3.3.1.1 计算链(履带)轮轴转速与转矩 10
3.3.1.2 选择链(履带)轮齿数 10
3.3.1.3 选取链(履带)节数和链(履带)型号 11
3.3.1.4确定实际中心距 12
3.3.1.5 计算作用轴上载荷 12
3.3.1.6 滚子链(履带)的耐疲劳工作能力计算 13
3.3.2 滚子链(履带)链(履带)轮 13
3.3.2.1 主动链(履带)轮的齿形设计 14
[资料来源:Doc163.com]
3.3.2.1.2 轴面齿廓尺寸 15
3.3.2.1.3 链(履带)轮结构尺寸 16
3.3.2.2.1 最大和最小齿槽形状 16
3.3.2.2.2 轴面齿廓尺寸 17
3.3.2.2.3链(履带)轮结构尺寸 18
3.4 齿轮齿条传动装置的设计计算 18
3.4.1 齿轮类型和精度等级 18
3.5 轴的设计计算 22
3.6 导向轮与齿条导轨的设计计算 24
3.7 轴承与联轴器的选取 25
3.7.1 轴承类型的选取 25
3.7.2 联轴器的选取 26
3.8 键的选取与计算 27
3.9 标准件的选取 27
4.密封与润滑 28
4.1 润滑 28
4.2 密封 28
5 设计总结 29
上一篇:PCG-1316重锤式破碎机总体设计(含CAD装配图)
下一篇:自走式草坪机结构设计(含CAD零件图装配图,PROE三维图,STEP)