
吸尘器造型设计(含CAD图,SolidWorks,IGS三维图)

吸尘器造型设计(含CAD图,SolidWorks,IGS三维图)(论文说明书12900字,CAD图纸7张,SolidWorks三维图,IGS通用三维格式)
摘 要
本课题来源于当今社会机械工业吸尘器的创新和更新换代基础之上,通过设计出新型吸尘器,从而来满足当今社会吸尘器性能,维修等方面不足的缺陷。
机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对吸尘器进行改良和优化是当务之急。有大型吸尘器设备企业对设备的安全指标的有着一定生产的严格要求。在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内吸尘器设备的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。吸尘器的发展与人类社会的进步和科学技术的水平密切相关。
本文运用大学所学的知识,提出了吸尘器的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了吸尘器总的指导思想,从而得出了该吸尘器的优点是高效,经济,并且节流质量高,运行平稳的结论。 [资料来源:www.doc163.com]
关键字:吸尘器,现象,设备,高效
Abstract
With development of all kind of science technology and global economy, Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.
Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow atcompressedneceengththdirectionprocedurework.
The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum . First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weightmatrix , by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by .
Key word: pneumatic manipulator cylinder pneumatic loop Fout degrees of freedom.
[来源:http://Doc163.com]

目 录
摘要 I
Abstract II
1 引言 1
1.1 课题的来源与研究的目的和意义 1
1.2 吸尘器的发展现状 2
1.3 本课题研究的内容 4
1.4 Solidworks设计基础 6
1.4.1 草图绘制 9
1.4.2 基准特征,参考几何体的创建 10
1.4.3 拉伸、旋转、扫描和放样特征建 11
1.4.4 工程图的设计 12
[资料来源:http://doc163.com]
1.4.5 装配设计 14
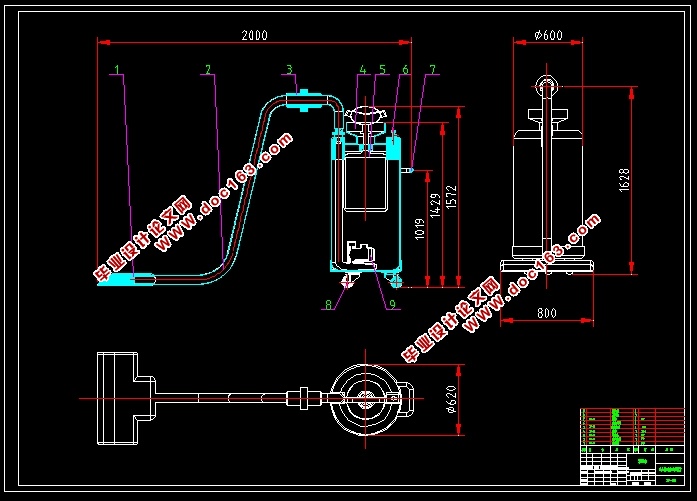
2 吸尘器总体结构的设计 15
2.1 吸尘器的净化方式 16
2.2 确定过滤速度 17
2.3 确定过滤面积 18
2.4估算除尘器的除尘效率、压力损失,确定过滤和清灰周期 19
2.5除尘工艺设计计算 19
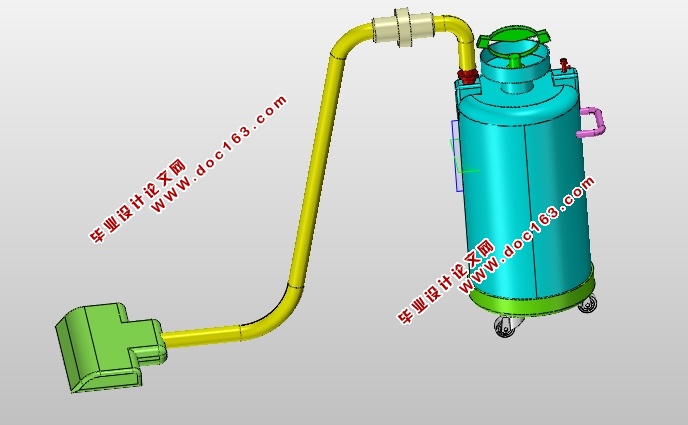
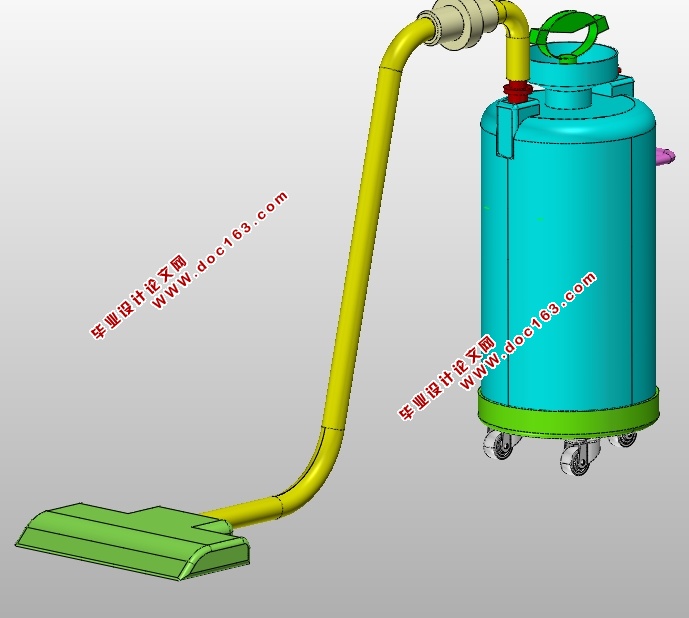
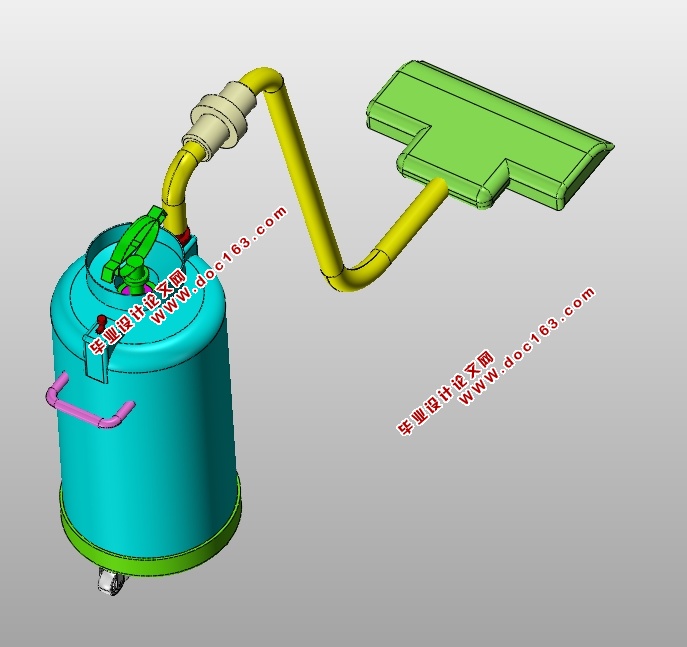
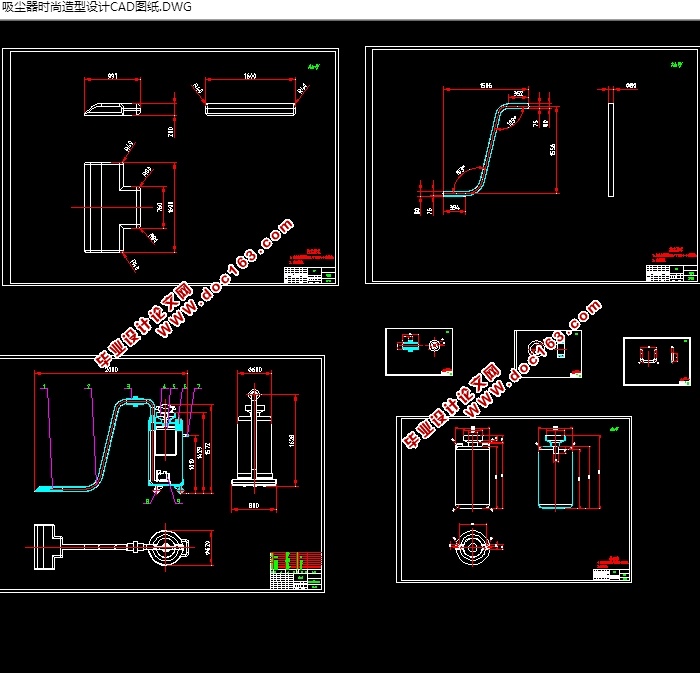
3 吸尘器中主要零件的三维建模 20
3.1地板刷的三维建模 21
3.2连接头的三维建模 22
3.3筒体的三维建模 23
3.4 吸尘器的三维建模 24
4 三维软件设计总结 25
结论 26
致谢 27
参考文献 28
[资料来源:http://doc163.com]
上一篇:向日葵脱粒机设计(含CAD图,SolidWorks,STEP三维图)
下一篇:圆锥破碎机的设计(含CAD图,SolidWorks三维图)