
扫地机器人的设计(含CAD图,SolidWorks,IGS三维图)

扫地机器人的设计(含CAD图,SolidWorks,IGS三维图)(论文说明书10000字,CAD图纸9张,SolidWorks三维图,IGS通用三维格式)
摘要:机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
本文主要设计的是扫地机器人的设计,该机器人采用统一动作、协调控制的原则,通过电机带动动力轮实现扫地机器人的运动,通过中控系统的控制来实现扫地机器人的动作,由于是中控系统控制,所以控制灵活,多样。通过控制器来控制机器人的动作,实现该机器人清扫、除尘的功能。
关键词: 扫地机器人;控制;结构;清扫
The design of sweeping robot
Abstract:The overall scheme of this paper to the electric push rod as the main component to design manned three degree of freedom triangular robot. The mechanism adopts the unified action, the coordinated control principle, by opening the travel of the push rod to realize the robot foot movement, to achieve a manned with three degrees of freedom robot motion control in the triangle by control system, the control system to control, so the control of flexible, multi sample. People can sit on the robot, the controller is adopted to control the robot's movement, the realization of some people rely on their own to complete the function of the leg muscles. [来源:http://www.doc163.com]
Must regard as the machine design is the machine design personnel carries on using creative ability the product design, the system analysis and a formulation product manufacture technology good opportunity.
Key words:Machine manufacture;Crankshaft;Processing craft;Fixture;
4 扫地机器人总体方案结构的设计
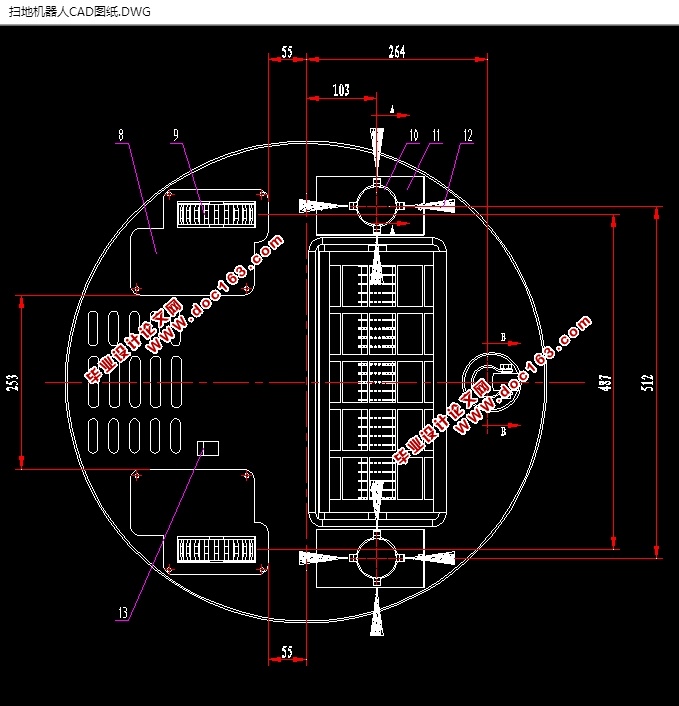
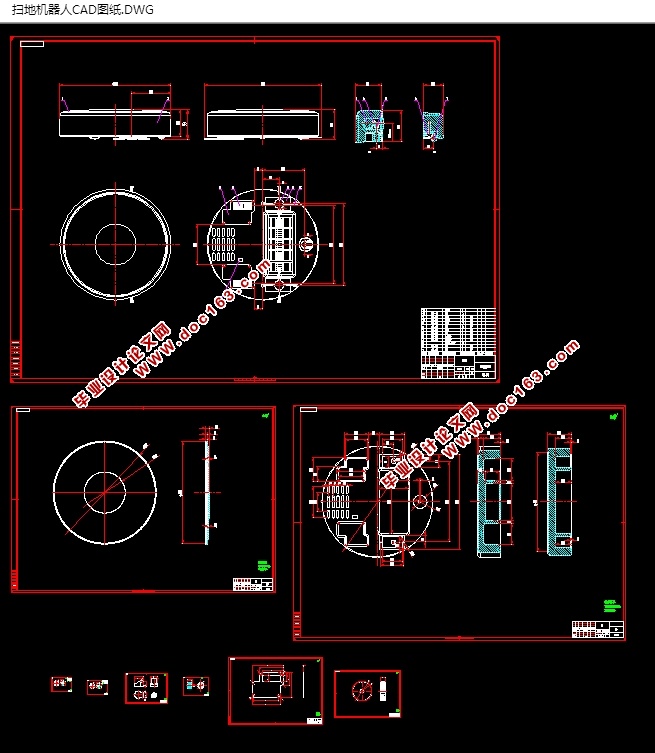
4.1 扫地机器人的总体方案图
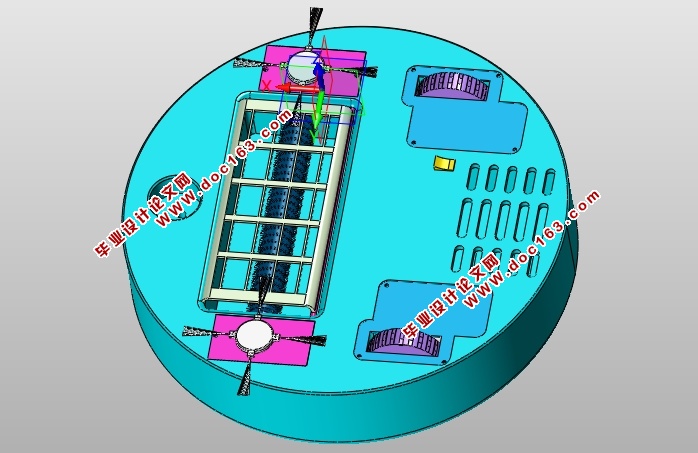
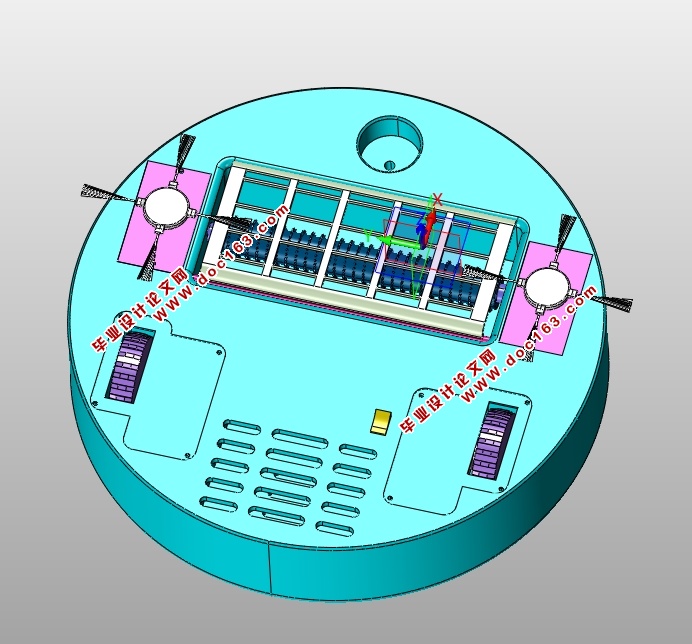
本次设计的扫地机器人采取的方案是:在机器人的两侧各布置一组毛刷,成对称分布,通过电动机通过伞齿轮传动控制动力轮转动来实现机器人的移动动作。根据控制方法的不同,机器人的转速或者方向也有所不同。整机采用成本低廉且经久耐用的塑料作为材料,经过喷漆喷塑处理后在外观上面得到了一定的保证。其具体方案布局图如下:
4.2 扫地机器人的工作原理
本次设计的扫地机器人的工作原理为:通过电动机通过伞齿轮传动控制动力轮转动来实现机器人的移动动作,根据控制方法的不同,机器人的转速或者方向也有所不同。1、清扫模式:随机清扫、螺旋式清扫、交叉清扫、沿边清扫、定点清扫、预约清扫等相结合,实现全方位立体清扫;
2、智能导航系统:实现对房间地形的重构,自动规划清扫路线;
[资料来源:http://www.doc163.com]
3、智能安全监控:防撞,防跌落,防缠绕,电池电量监测;
4、创新功能:灰尘量识别,实现床底清扫,手机遥控模式,尖端气流滤尘
技术,室内空气质量监测与提醒;
5、其他基础功能:自动返回并充电,灰尘盒安装检查,灰尘盒容量探测
5 机械结构的设计
5.1电机的选型计算
已知整个扫地机器人中零件的重量,我们取总重量为10Kg,范围为50mm~200mm,动力轮转速为1~2r/min。
[资料来源:https://www.doc163.com]
[资料来源:https://www.doc163.com]
目 录
绪论 1
1. 机器人简史 3
2. 应用机器人的意义 6
3. 本课题研究的内容 9
4. 扫地机器人总体方案结构的设计 12
4.1 扫地机器人的总体方案图 12
4.2 扫地机器人的工作原理 12
5. 机械结构的设计 18
5.1电机的选型计算 20
5.2齿轮传动的设计计算 20
5.3扫地机器人的功能概述 20
5.3.1 扫地机器人的清扫模式 20 [资料来源:http://www.doc163.com]
5.3.2 智能导航系统 20
5.4 齿轮的强度校核 20
5.5 扫地机器人的智能控制系统 20
6. 扫地机器人的三维建模 21
6.1 动力轮的三维建模 21
6.2 万向轮的三维建模 22
6.3 毛刷的三维建模 23
6.4 扫地机器人的三维建模 22
7. 三维软件设计总结 22
结论 25
参考文献 26
致谢 27 [来源:http://Doc163.com]
上一篇:长齿条加工专用车床设计(含CAD图,SolidWorks,IGS三维图)
下一篇:麦冬收割机的设计(含CAD图,SolidWorks,IGS三维图)