
四自由度车床上料机械手设计(含CAD零件装配图)

资料介绍:
四自由度车床上料机械手设计(含CAD零件装配图)(任务书,设计说明书13000字,CAD图纸5张)
摘要
本设计是关于车床的机械手设计,在日常工作生产中机械手的运用是非常广泛的可以说是一种必不可少的科技产品,机械手是一种模仿人手的结构而设计的一种零件,在日常工作中它可以根据人们发送的指令来完成一系列的工作,所以它的灵活度十分的高运用很广泛。
这个主题的汽车计算机辅助设计技术的应用,机械和液压原理设计的总体方案设计,已经清楚的坐标机械手和自由形式和机械手的技术参数。和设计夹紧机械手手结构,结构手腕、手臂结构。所以它可以执行实际生产自动上料运动,根据满足生产力的需求是机械手的运动速度。
(一)原始数据及资料
(1)原始数据:
A生产纲领: 100000件
B自由度 (四个自由度)机器人将需要解除臂,拉伸,旋转,手腕旋转和平移四个自由度
手部转动90º
臂伸长(收缩)500mm
臂转动 180º
臂上下运动600mm
(2)设计要求:
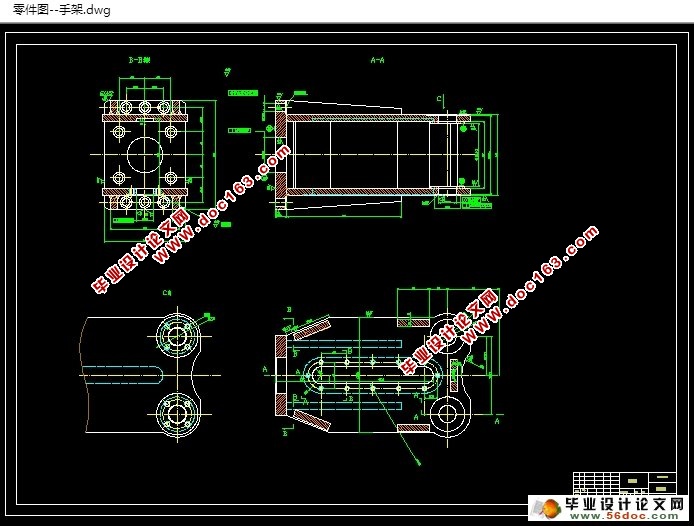
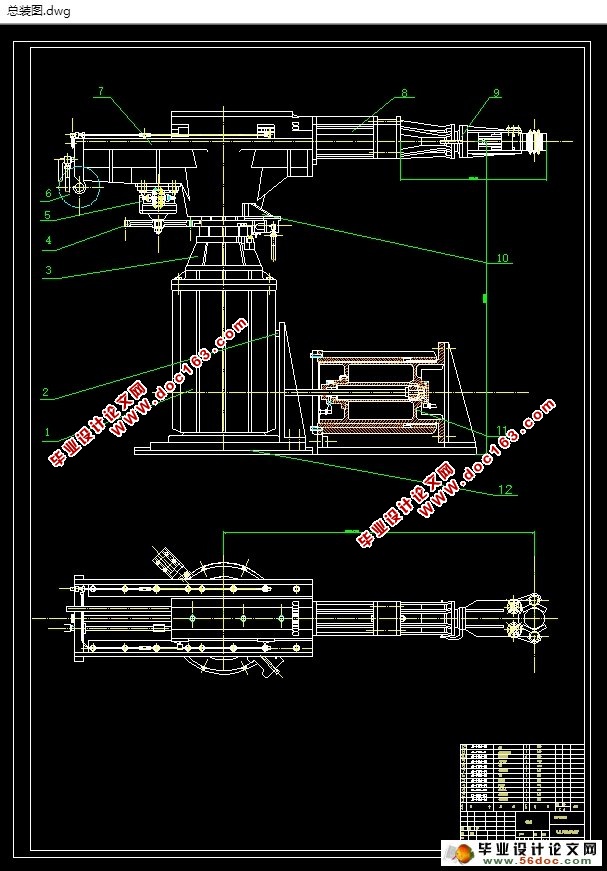
A上料机械手的结构设计图、装配图、各主要零件图(1套)
B设计的计算说明书(1份)
(3)技术上要求
[资料来源:Doc163.com]
主要参数和确定:
A坐标形式: 直角坐标系
B臂的运动行程: 伸缩运动500mm,回转运动180º
C运动速度: 使生产率满足;生产纲领的要求即可
D控制方式:初始起止设定位置
E定位精度: ±3毫米
F手指握力: 60千克
G驱动方式: 液压驱动系统
[资料来源:http://www.doc163.com]

目 录
第一章绪论 1
1.1 工业机械手概述 1
1.1.1 机械手应用性 2
1.1.2机械手的先进性 3
1.1.3国内外的研究现状以及趋势 3
1.2设计目的 3
1.3课题内容和设计要求 4
[版权所有:http://DOC163.com]
1.4 机械手的组成和系统工作原理 6
第二章机械手整体设计方案论证 7
2.1上料的机械手设计 7
2.1.1 整体车床上料机械手的结构和类型 7
2.1.2机械人手臂的坐标的形式以及多个自由度 8
2.1.3手臂设计的具体选用方案 9
2.2机械人手臂腰座结构设计 9
2.2.1机械人手臂腰座结构设计要求 9
2.2.2设计具体采用方案 11
2.3机械手手臂结构的设计 12
2.3.1机械臂的设计 12
2.4机械手腕部设计 13
2.4.1机器人手腕结构的设计要求 13
2.4.2设计具体采用方案 14
2.5机械手末端执行器(手爪)的结构设计 15
2.5.1机械手末端执行器的设计要求 15
2.5.2机器人夹持器的运动和驱动方式 16
2.5.3机器人夹持器的典型结构 16
2.5.4设计具体采用方案 18
[来源:http://www.doc163.com]
2.6机械手的机械传动机构的设计 18
2.6.1工业机器人传动机构设计应注意的问题 18
2.6.2工业机器人常用的传动机构形式 19
2.6.3设计具体采用方案 19
2.7机械手驱动系统的设计 20
2.7.1机器人各类驱动系统的特点 20
2.7.2工业机器人驱动系统的选择原则 20
2.7.3机器人液压驱动系统 21
2.7.4机器人电动驱动系统 22
2.7.5设计具体采用方案 24
第三章机械手设计计算 25
3.1 夹持式手抓的设计计算 25
3.1.1 手抓部力的计算 25
3.2腕部设计 26
3.2.1腕部的设计要求 26
3.3.1臂部设计要求 27
3.3.2 臂部回转运动 28
3.3.3臂部升降运动 28
3.3.4臂部升降油缸的计算 29
第四章机械手的其他部分设置 31 [来源:http://Doc163.com]
4.1 缓冲定位装置 31
第五章机械手总体方案总结 32
5.1 传动方案的确定 32
5.2 规格参数 32
第六章毕业设计的感想 33
参考文献 34
致谢 35
[资料来源:http://doc163.com]