
基于STM32的自平衡系统的设计
基于STM32的自平衡系统的设计(论文13000字)
摘要:本文主要介绍了一种自动平衡装置,该装置具有自动调节载物平台水平状态的功能特点。本系统采用以STM32最小系统开发板为核心和基础,它是整个系统的神经中枢,本系统其它各部件能否协调一致的工作全要听从它的指令。工作时,当底板平台在一定范围内出现倾斜时,可以通过写入单片机的程序来调节升降杆的升降高度,从而达到使上面载物台一直保持水平状态的功能。本装置引用了卡尔曼滤波算法对采集数据进行优化,使得升降杆调节的幅度最大可能的接近底面真实倾斜高度。采用L298N电机驱动升降杆可以使升降杆升降更平稳。本装置最大的优点就是实际应用性很强。
关键词:STM32;自平衡;卡尔曼滤波;L298N
Self balancing system based on STM32
Abstract:This paper introduces an automatic balancing device, which has the function of regulating the level of the platform automatically.The system uses STM32 minimum system development board as the core and foundation, it is the nerve center of the whole system, and whether the other parts of the system can work in harmony, should obey its instructions. When the floor platform in a certain range of tilt, the program can be written by the microcontroller to adjust the lifting height of the lifting rod, so as to achieve the above has been maintained at the level of the function of the table. The device uses the Calman filtering algorithm to optimize the data acquisition, so that the maximum amplitude of the lifting rod can be close to the true tilt height of the bottom surface. Using L298N motor to drive the lifting rod can make the lifting rod more stable. The biggest advantage of this device is that it is very practical.
Key words:STM32; self balance; Calman filter; L298N
[资料来源:http://doc163.com]

目 录
1绪论 1
1.1研究背景 1
1.2研究目的和意义 1
1.3 研究现状 1
1.4 论文的组织结构 2
2系统的方案设计 2
2.1 系统的总体设计 2
2.2 系统达到的预期效果 2
2.3 系统的各模块选用与论证 3
2.3.1 底板的选用 3
2.3.2 升降杆的选用 3
2.3.3 载物平台的选用 4
2.3.4 开发板的选用 4
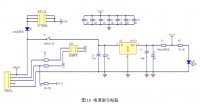
2.3.5 开关电源的选用 4
2.3.6 其他小模块的选用 6
2.3.6.1 传感器的选用 6
2.3.6.2 电机驱动模块的选用 7
3系统的硬件设计 8
3.1 STM32F103ZET6开发板详述 8
3.2 系统整体搭建与调试 11
3.2.1 电机驱动模块的设计与安装 12
3.2.2 双组开关电源的安装调试 13
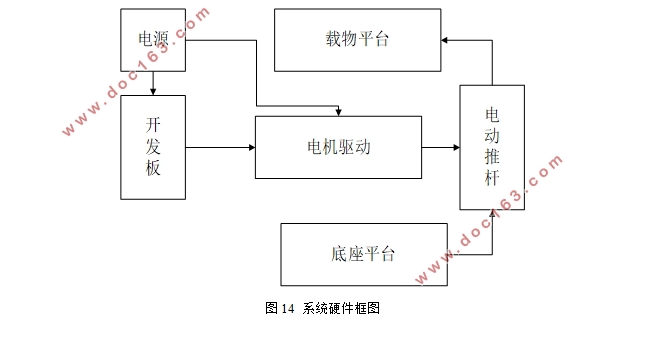
3.3 系统整体硬件实物图及分析 13
4系统的软件设计 14
4.1 主程序流程图 15
4.2 手动调整上平面水平功能软件设计 16
4.3 自动调节水平功能软件设计 17
4.4 卡尔曼滤波算法 17
5数据分析及结论 19
5.1 测试的数据 19
5.2 数据的分析及结论 20
6设计总结 21
6.1 对设计的小结 21
6.2 设计的待改进反面及构想 21 [来源:http://www.doc163.com]
参考文献: 21
致谢 23 [资料来源:www.doc163.com]