
重载无人驾驶电动集装箱运输车总体布局设计(含CAD零件图装配图)

重载无人驾驶电动集装箱运输车总体布局设计(含CAD零件图装配图)(任务书,开题报告,文献摘要,外文翻译,论文说明书14000字,CAD图6张)
摘 要
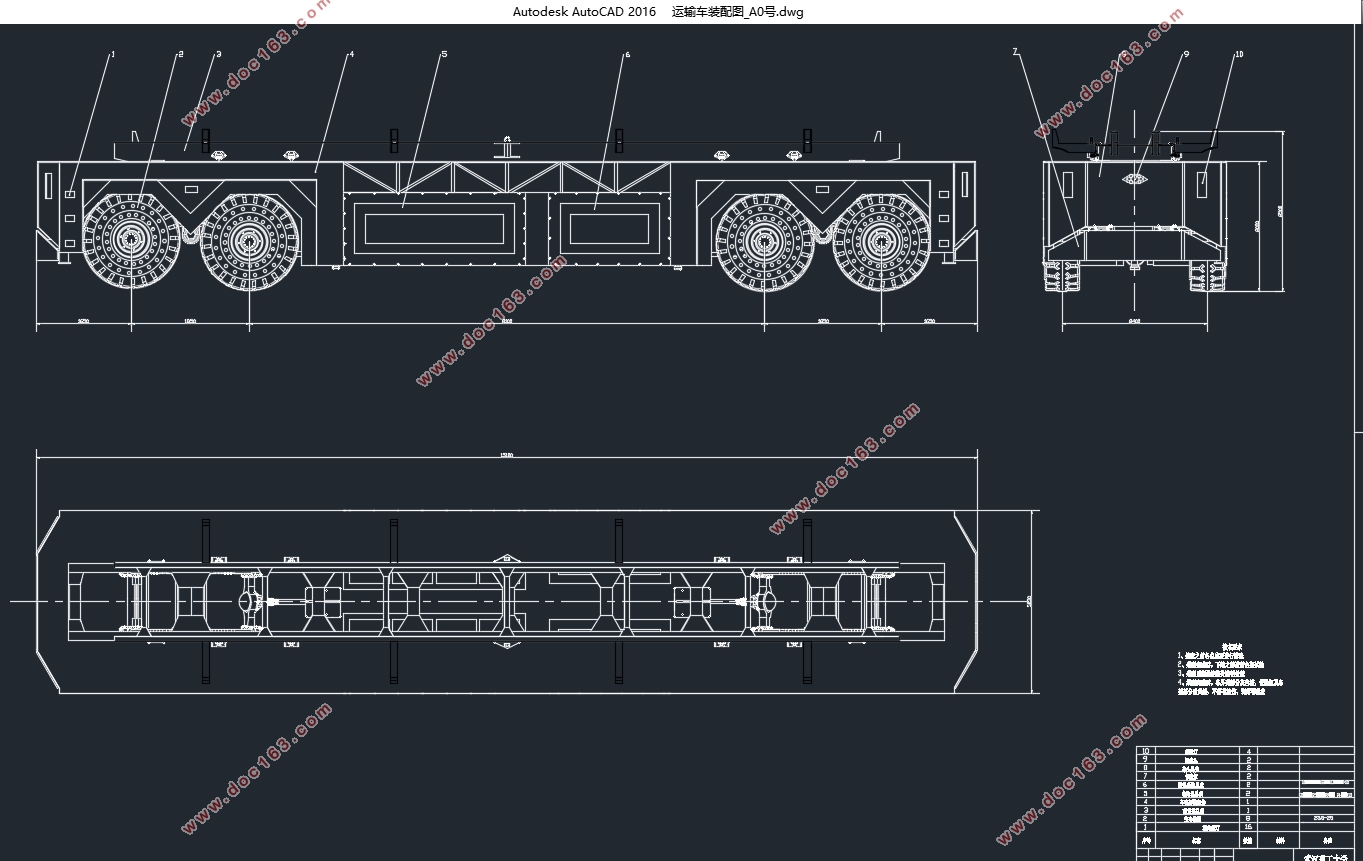
对重载无人驾驶电动集装箱运输车上的各个主要部件进行了布置设计并对相对应的参数进行了设计和计算,在此基础上完成了总体布局设计。在设计过程中,在给定了车辆类型、部分参数的情况下,对汽车的结构形式和布置形式进行了选择,依次确定了轴数、驱动形式、布置形式。考虑到该车工作场地的特殊性以及运输车的基本性能要求,对该运输车的尺寸参数、质量参数和性能参数进行了选取和计算。最后设计出该运输车的总体外观并用CATIA对各总成进行建模并组装,最后绘制出了总布置图和零件图。
在设计过程中,考虑到该运输车载重量极大,为了保证行驶安全性,对驱动桥进行了强度校核。在分析过程中先运用了图解法,然后用CATIA中的静强度模块进行校核,测试其合理性。最后的分析校核结果表明,该驱动桥符合强度要求,切合实际。
关键词:电动;集装箱;总布置;无人驾驶
Abstract
In this paper, the overload of each electric unmanned container transport vehicle for the layout design of main components and the corresponding parameters for the design and calculation, on the basis of completed the general layout design. In the design process, in a given under the condition of the vehicle type, part parameters, on the structure of automobile and decorate a form choice, in turn, determine the number of shaft, drive form, arrangement form. Considering the particularity of the work site and the basic performance of the transport vehicle, the size parameters, quality parameters and performance parameters of the vehicle are selected and calculated. Finally, the overall layout design of the transport vehicle was designed and the parts were modeled and assembled by CATIA, and the general layout was finally drawn.
[来源:http://www.doc163.com]
In the design process, considering that the carrying capacity of the vehicle is very heavy, in order to ensure the safety of driving, the intensity check of the drive axle is carried out. In the process of analysis, the graphic method is used, then the finite element analysis module in CATIA is used to check the rationality of the test. The final analysis results show that the drive bridge meets the strength requirement and is practical.
Key Words:Electric;Container;The layout;unmanned
2.3.3主要性能参数的确定
(1)动力性参数
初步已知部分参数如下:
表2.1 运输车基本参数
整车外廓(mm) 15100×3030×2500 电机额定功率(kw) 75
满载质量(kg) 80000 电机峰值功率(kw) 140
主减速比 4.1:1 电机额定电压(V) 540
最高车速(km/h) 30 电机最高转速(rpm) 8500 [资料来源:www.doc163.com]
最大爬坡度 无要求 电机最大转矩(N∙m) 530
行星齿轮减速比 6.3:1 电机额定转速(rpm) 3300
电机额定转矩(N∙m) 210
[版权所有:http://DOC163.com]
目录
第一章 绪论 1
1.1重载无人驾驶电动集装箱运输车概述 1
1.1.1重载无人驾驶电动集装箱运输车的发展现状 1
1.1.2重载无人驾驶电动集装箱运输车的设计要求 2
1.2本论文研究的内容 2
第二章 主要参数的确定 4
2.1总体布局设计的特点和要求 4
2.2汽车形式的选择 4
2.2.1轴数 4
2.2.2驱动形式 4
[资料来源:http://doc163.com]
2.2.3布置形式 5
2.3重载无人驾驶电动集装箱运输车主要参数的确定 5
2.3.1主要尺寸参数的确定 5
2.3.2主要质量参数的确定 6
2.3.3主要性能参数的确定 7
第三章 总体布置 11
3.1整车布置的基线 11
3.2电池包的布置 11
3.3电池通风系统的布置 12
3.4转向系统的布置 13
3.5动力总成的布置 14
3.6悬架的布置 14
3.7车架总成的布置 15
3.8信息子系统的布置 16
3.9总布置图 16
第四章 驱动桥壳的受力分析 19
4.1计算原理 19
4.2不同工况下驱动桥壳的受力分析 19
4.2.1垂直载荷工况 20
4.2.2纵向牵引工况 21
第五章 驱动桥壳的有限元分析 24
5.1有限元分析概述 24 [资料来源:http://www.doc163.com]
5.2驱动桥壳的有限元分析 24
5.3分析及评价 28
第六章 结论 30
参考文献 31
致谢 33
附录A 34
[资料来源:https://www.doc163.com]
上一篇:无人驾驶微型巴士内饰虚拟设计(含CAD图,STP三维装配图)(英文版)