
数控铣床自动装卸料气动机械手PLC控制设计

资料介绍:
数控铣床自动装卸料气动机械手PLC控制设计(19000字)
【摘要】
在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。机械手是机器人的操作机,是机器人完成各种任务的执行机构。
本文主要针对生产线上的自动化设计了一个四自由度搬运机械手,实现生产的自动化。减轻了工人的劳动强度,提高了劳动生产率。
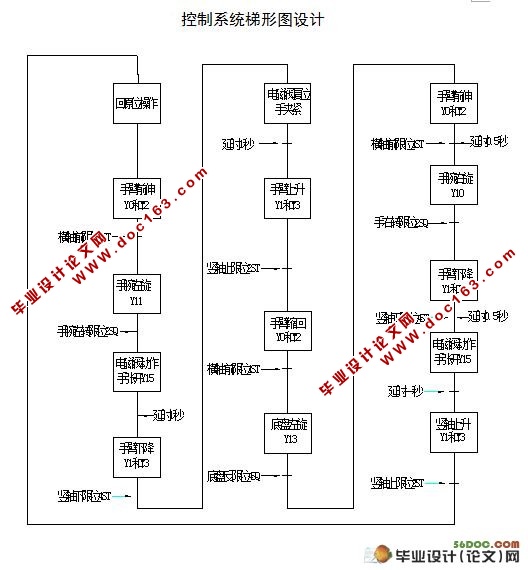
该机械手采用电机驱动,实现了伸缩、升降、旋转、夹紧等动作。为了现实这些动作,采用部件设计,分别实现这些动作。比如了为实现伸缩这个动作,设计了一个水平伸缩机构。PLC把各个部件的独立运动协调起来,形成了一个有规则运动系统。各个部件的联接,先铸造出一个合格的机械本体,把各个部件安装在机械本体上,形成一个机器。控制系统采用PLC控制,程序用T形图编写。
【关键词】: PLC;四自由度;工业机器人。
本设计的机械手有四个自由度,分别用两个步进电机来驱动提升机构和伸缩机构,用两个直流电机来完成手腕部和腰部的旋转动作,在提升机构中用两个限位开关来限制机械手的上下运动边界,伸缩机构中同样也是用两限位开关来限制机械手的前后运动边界,在手腕部和腰部分别用两个接近开关来限制正反转的极限角度,所以PLC的输入点数有八个,两个步进电机分别用两个步进电机驱动器控制,两个直流电机用两个直流电机控制器控制,手抓的夹紧和张开用一个电磁阀控制 [版权所有:http://DOC163.com]



[来源:http://www.doc163.com]
