
回转式机械手控制系统的设计(含CAD图)

回转式机械手控制系统的设计(含CAD图)(任务书,论文说明书10000字,CAD图9张)
摘要
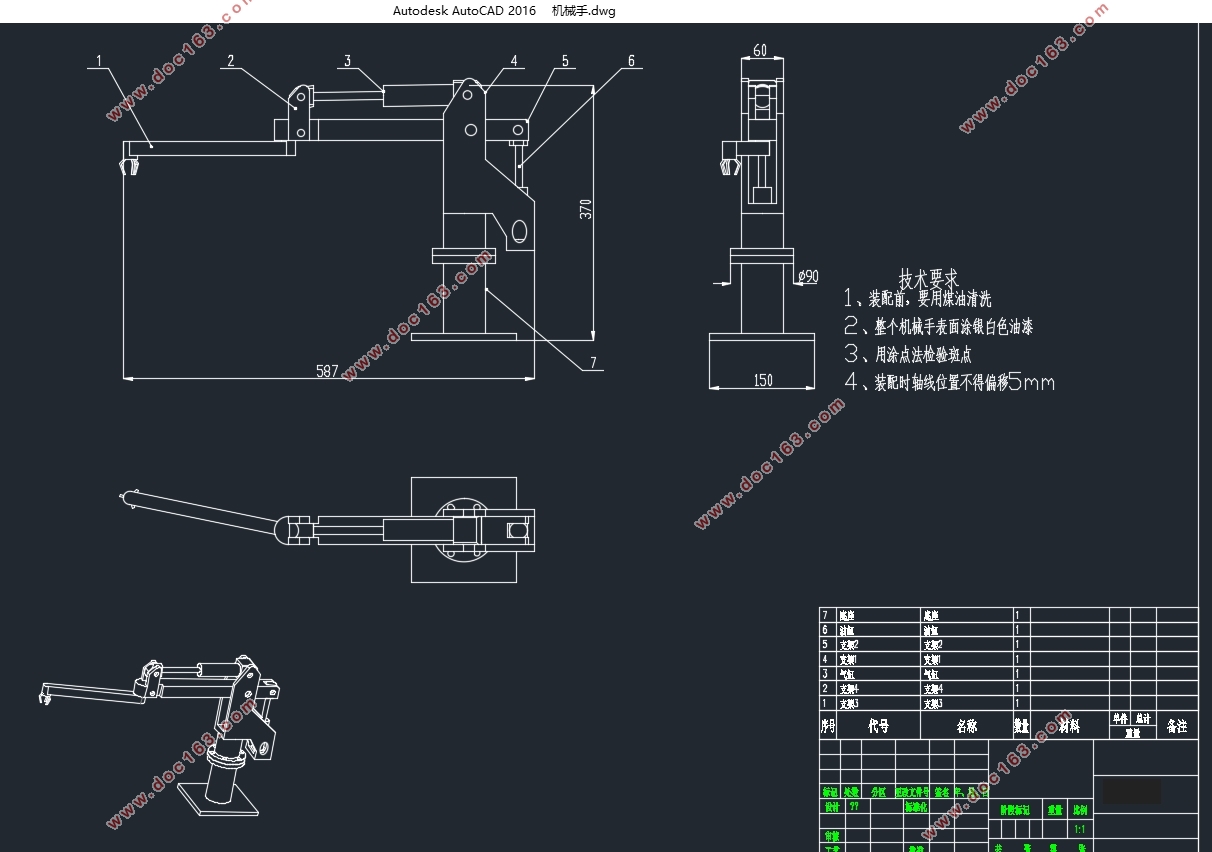
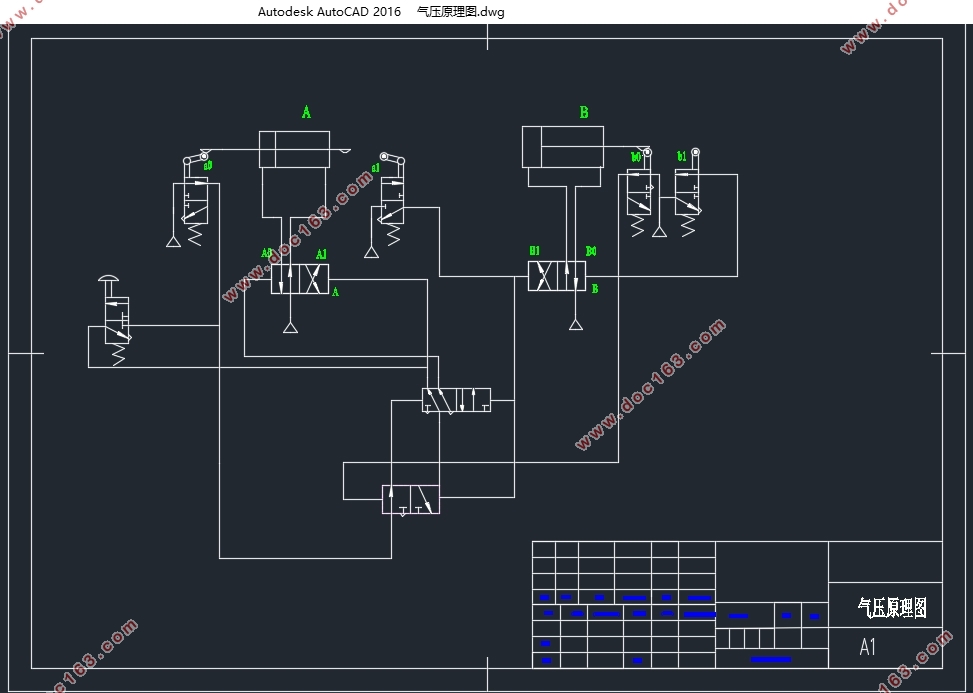
机械手就是模拟人手部的运动动作,来代替人进行一些操作。它是人为设定程序之后进行自动化的装卸,搬运等操作。机械手是出现最早的一种能够代替人进行操作的工业机器人,也是出现最早的现代化的机器人,它可以代替人的繁重的劳动来实现生产的机械化和自动化,能在恶劣的环境下实现自动操作来保护人的生命安全,因此在机械制造、冶金、电子、轻工和原子能等领域中得到广泛的运用。本次课题是关于回转式机械手控制系统的设计,对于这个课题,重点是在于控制系统方面的设计。这个课题对于机械手的要求是:机械手抓取一定重量的物体,从一个平台旋转一定的角度到另外一个平台上放下。通过对这个课题的了解,对于机械手的结构可以选择圆柱坐标型结构,并且在机械手的总体结构中包括一个液压缸和一个气压缸,液压缸控制机械手的升降运动,气压缸控制机械手的左回转运动,夹持器部分主要为一个吸附式电磁铁。在整个控制过程中主要使用的是PLC(可编程逻辑控制器)来进行编程控制机械手的运动的。回转式机械手控制方面主要包括了两种控制方式:1、手动控制2、全自动控制。整个设计了机构简单的机械手,具有动作固定,易于拆装,可靠性较高,编程比较容易等特点。 [资料来源:http://doc163.com]
关键词:机械手 回转式 圆柱坐标型 液压缸 气压缸 PLC控制
Design of Rotary Robort Control System
ABSTRACT
Robot is to imitate hand movements to help people who had to replace a portion of the mechanical work. Is a way to programmatically porter pieces, manipulation tools, and complete automation equipment of various jobs. Robot is the earliest industrial robots, is the earliest modern robot, it can replace heavy labor of people in order to achieve production mechanization and automation, can operate in hazardous environments to protect personal safety, which is widely used in machinery manufacturing, metallurgy, electronics, light industry and atomic energy sectors. The topic is on the rotary robot control system design, to the subject, the focus is that the control systems design. This issue is the requirement for the robot: a robot to crawl certain weight of the object, from a certain angle of rotation of the platform to another platform down. Through the understanding of the subject, for the structure of the robot can choose a cylindrical coordinate type structure, and the overall structure of the robot includes a hydraulic cylinder and a pneumatic cylinder, hydraulic cylinder control vertical movement manipulator, pneumatic cylinder control robot left rotary motion , primarily as a holder portion adsorption electromagnet. Throughout the control process it is mainly used in PLC (programmable logic controller) to be programmed to control robot movement. Including three control modes: 1, automatic control 2, 3 semi-automatic control, manual control. The whole design of the robot has a simple mechanism, fixed operation and easy installation, high reliability, easier programming. [资料来源:https://www.doc163.com]
Keywords: Manipulator Rotary Cylindrical coordinate type Hydraulic cylinders Pneumatic cylinder PLC control
3.1 机械手的控制系统的设计思路
所谓的机械手的控制系统,就是指通过人为的编程,使得机械手能够进行预期中的动作来达到控制机械手的一种系统,让机械手变得高效率,准确性。机械手通过预先设定好的程序模拟人手部动作进行的操作,提高了生产效率,降低了工人的劳动强度,提高了生产的精度。可编程逻辑控制器(PLC)由于其具有的高可靠性、编程方便、易于使用和修改、易于扩展和维护、环境要求低、体积小巧、安装测试方便,能够应用在相当恶劣的环境中等性能在工业控制中有着广泛的应用。
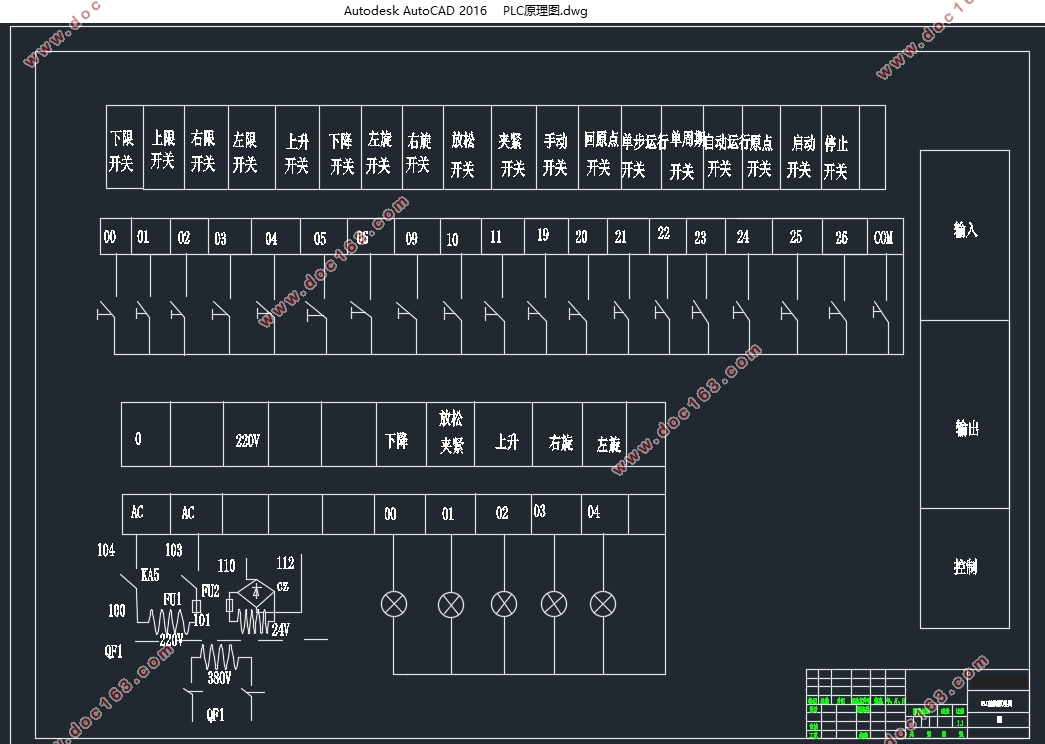
由于PLC的稳定性强,具备一定的抗干扰能力,能够在相当恶劣的环境中运行,并且便于设备的安装、调试。所以,设计机械手实现的功能是在传送带生产线上,通过PLC编程来控制机械手的动作,完成获取和转移工件的工序。机械手下降并夹紧物体。机械手上升并转动方向,在指定位置下降后松开,随后恢复到初始状态,传动带启动,机械手上升、下降、旋转、抓取、放开工件都是由双线圈二位电磁阀控制气缸运动控制的。当上升电磁阀通电,机械手下降;上升电磁阀断电时,下降动作停止并保持。下降和旋转过程的实现同理可得。而夹紧和放松则是由单线圈二位电磁阀控制气缸运动控制的,线圈通电时执行夹紧指令,断电时执行放松指令。为了保证机械手的动作精确性和准确性,机械手在关键部位需要安装限位开关。除此之外,为了方便调整机械手的位置,可以对机械手进行设置,可以设置手动和自动两种控制方式。具体控制系统中启动、停止按钮,物品检测开关,限位开关,夹放检测开关的数据全部传入PLC中进行处理,处理后现分别传入上升电磁阀,下降电磁阀,旋转电磁阀,夹紧电磁阀和传送带启动等元器件进行动作。PLC的控制系统的设计主要包括硬件设计、软件设计和调试三个部分。其中硬件设计包括PLC的选型,I/O资源的配置,PLC接线图的设计和操作面板的设计等。软件设计依赖于对程序的熟悉和经验。这里着重介绍一下调试过程。具体步骤包括:系统流程图的绘制;梯形图的绘制,这是在PLC程序设计中非常关键的一步,绘制出来梯形图,可以很清楚的知道程序的运行情况;将程序输入到PLC用户存储器,检验程序是否有误;调试程序,直到满足设计要求为止。在上述过程中有几点需要注意:为了避免产生通信错误,确保数据线与计算机的接口与软件的端口一致;PLC的输入/输出点必须接入电源,其连接的外部模块也必须接入电源;连接 PLC 的输入/输出端口的动作与程序中定义的动作一致。
3.2 回转式机械手手动系统的设计
回转式机械手手动方式控制是指当每按下一次按钮时,机械手运动一下,按下复位按钮时,机械手才会回到原位。如:当按下下降的按钮,机械手下降,当按下上升的按钮,机械手上升,当按下旋转按钮,机械手旋转。手动的工作方式可以使机械手置于原点位。通过手动控制机械手的运动,方便在出现故障时候检修。
[资料来源:https://www.doc163.com]

目录
摘要 I
ABSTRACT II
第一章 序言 1 [资料来源:Doc163.com]
1.1 概述 1
1.2 机械手的简介 2
1.2.1 机械手的应用 3
1.2.2 回转式机械手的概述 4
1.2.3 回转式机械手的发展 4
1.2.4 机械手的结构 5
1.2.5 机械手的驱动和控制 5
第二章 回转式机械手的设计 7
2.1 回转式机械手总结构图的设计 7
第三章 回转式机械手控制系统的设计 10
3.1 机械手的控制系统的设计思路 10
3.2 回转式机械手手动系统的设计 11
3.3 回转式机械手自动系统的设计 14
第四章 回转式机械手软件设计 17
4.1 回转式机械手控制系统的软件及选型 17
4.2 回转式机械手控制系统的软件设计 18
总结 21
参考文献 22
致谢 23
上一篇:1T电液锤控制系统的开发设计(三菱PLC)(含CAD图)