
基于PLC控制装卸料液压工业机械手的设计(含CAD零件图装配图)

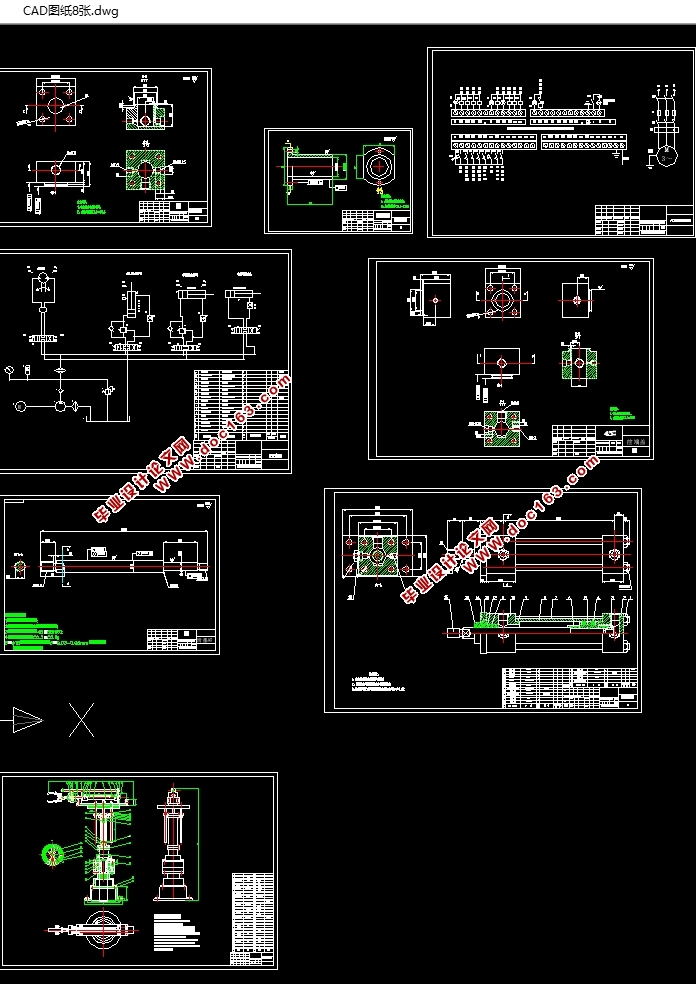
基于PLC控制装卸料液压工业机械手的设计(含CAD零件图装配图)(设计说明书10000字,CAD图纸8张)
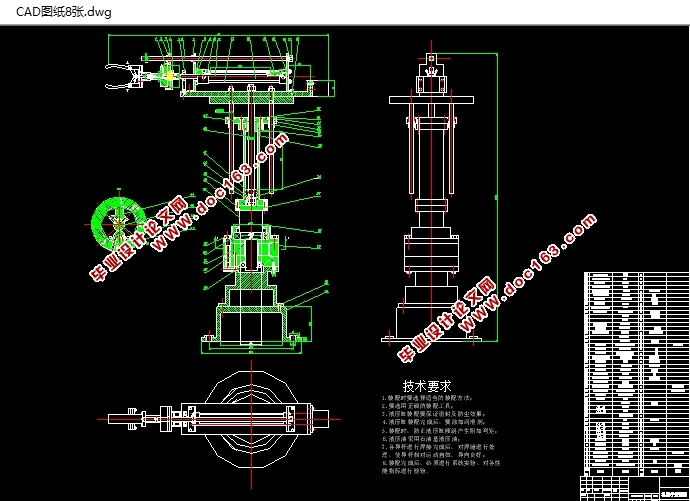
PLC控制机械手的机械设计的组成及各部分关系概述:
它主要由机械系统(执行系统、驱动系统)、控制检测系统及智能系统组成。
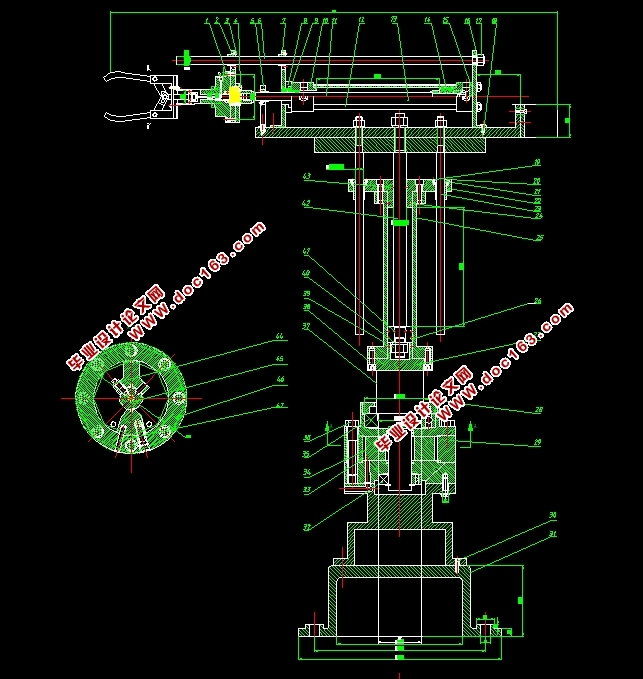
(1) 执行系统:执行系统是PLC控制机械手的机械设计完成关节工件,实现各种运动所必需的机械部件,它包括手部、腕部、机身等。
(2) 末端执行器:机械手为了进行作业而配置的操作机构,比如直接喷漆工件。
(3) 腕部:又称手腕,是连接手部和臂部的部件,其作用是调整或改变末端执行器的工作方位。
(4) 臂部:联接机座和手部的部分,是支承腕部的部件,作用是承受工件的管理管理荷重,改变手部的空间位置,满足机械手的作业空间,比如将各种载荷传递到机座。
(5) 机身:机械手的基础部分,起支撑作用,是支撑手臂的部件,其作用是带动臂部自转、升降或俯仰运动。
(6) 驱动系统:为执行系统各部件提供动力,并驱动其动力的装置。常用的有
机械传动、液压传动、气压传动和电传动。
(7) 控制系统:通过对驱动系统的控制,使执行系统按照规定的要求进行工作,当发生错误或故障时发出报警信号。
(8) 检测系统:作用是通过各种检测装置、传感装置检测执行机构的运动情况,根据需要反馈给控制系统,与设定进行比较,以保证运动符合要求。 [资料来源:http://Doc163.com]
2.1 PLC控制装卸料液压机械手设计要求
课题的主要技术要求:
设计主要技术参数:
工件形状为圆柱形,其尺寸范围为直径20—80mm,
高为50—150mm,其重量小于10Kg。
自由度数:4个; 坐标形式:圆柱坐标;
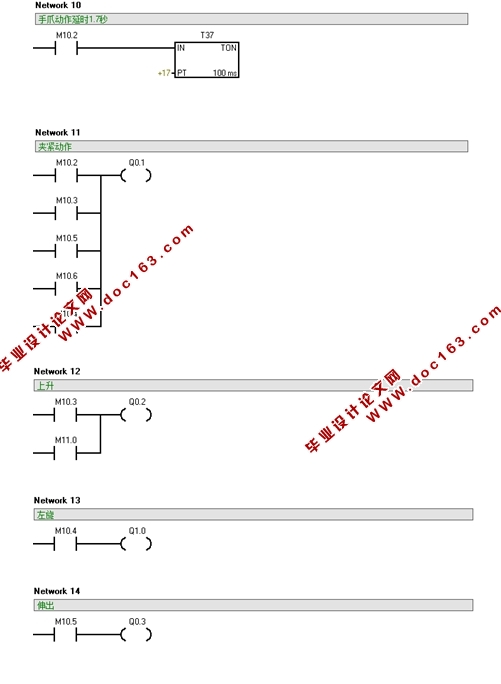
最大工作半径:1200mm,实现上升、下降、左旋(移)、右旋(移)、加紧 、放松。
手臂参数:
机械手的定位精度为±0.5mm。工作台A、B分别由电动机拖动,两者平行且相距1500mm。
[来源:http://Doc163.com]
目 录 [版权所有:http://DOC163.com]
摘 要 2
Abstract 3
目 录 5
1 绪论 7
1 绪论 7
1.1工业机械手的分类 7
1.1.1按功能分类 7
1.1.2安驱动方式分类 8
1.1.3按控制方式分类 8
1.2 机械手的组成 8
1.2.2 驱动组织 9
1.2.3 操控系统分类 9
1.3 工业机械手的发展趋势 9
1.4 课题研究的背景和意义 10
2 PLC控制机械手设计要求与方案 11
2.1 PLC控制装卸料液压机械手设计要求 11
2.2 基本设计思路 12
2.2.1 系统分析 12
2.2.2 总体设计框图 13
2.3 液压机械手结构设计 13
2.4 机械手材料的选择 13
2.5 液压机械手驱动方式的选择 14
2.6 动作要求分析 14
2.7 液压机械手结构及驱动系统选型 14
3 机械手机械部分的设计计算 15
3.1 手部结构 15
3.2 机械手手爪设计计算 15
3.2.1 手爪的力学分析 15
3.3 升降方向设计计算 16
3.4 水平方向设计计算 16
3.5 机身结构的设计校核 16
3.7 液压系统的设计 17
4 液压系统其它元件的设计 18
4.1 计算和选择液压元件 18
4.1.1液压泵的计算 18
4.1.2 控制元件的选择 18
4.1.3 油管及其他辅助装置的选择 19
4.2 液压系统性能的验算 19
5 机械手PLC控制系统设计 20
5.1 机械手的工艺过程 20
5.2 PLC控制系统 20
5.3 PLC 控制系统程序设计 21
参考文献 28
[来源:http://www.doc163.com]
致 谢 29 [资料来源:http://doc163.com]
上一篇:热泵干燥装置电控系统设计