
机械手自动控制系统的PLC实现方法研究(含CAD流程图接线图)
机械手自动控制系统的PLC实现方法研究(含CAD流程图接线图)(任务书,开题报告,文献综述,论文说明书11000字,CAD图纸1张,答辩PPT)
摘 要
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。机械手就在这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、滑杆、气缸等机械器件组成;电气方面有步进电机、驱动模块、传感器、开关电源、电磁阀、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、气动技术、检测技术等,是机电一体化的典型代表仪器之一。本文介绍的机械手是由PLC输出两路脉冲,分别驱动横轴、竖轴步进电机驱动器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;直流电机拖动手爪和底盘旋转,位置信号由旋转码盘和接近开关反馈给PLC主机;电磁阀控制气开阀的开关来控制机械手手爪的张合,从而实现机械手精确运动的功能。本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。 [资料来源:https://www.doc163.com]
关键词:可编程控制器PLC;机械手;脉冲;步进电机驱动器;步进电机;直流电机;传感器、限位开关。
Abstract
In industrial production and other fields, as a result of the need to work, people are often subjected to high temperature, corrosion and toxic gases and other factors that increase the labor intensity of the workers, even life crisis. The robot arm was birth in this environment. The robot arm is the traditional task-operating component in the industrial robot system, and is one of the key components. The machine structure consists of the bead curl pole , slippery pole and cylinder. The electrical aspects consist of stepping motor, driver parts, sensor, switch power supply, electromagnetism valve, and etc.This equipment is composed of the programmable control technique, the position control technique, air driving technique, the monitor technique, and is one of the typical representation of the integration of mechanism and electicity.The introductive robot arm of this text can output two lines pulses by the PLC, driving the horizontal stalk, and the perpendicular stalk to drive the electrical engineering actuator respectively, to control the robot arm precision of the horizontal stalk and perpendicular stalk at the fixed position, tiny move switch input the position signal to the PLC.The direct current motor drags along to begin the claw and bedrocks to revolve, the position signal from revolve the code dish and near to the switch feedback to host of PLC;The electromagnetism valve control the machine hand open and close, thus carry out the function of the machine hand precision work. This topic draw up the material porterage the machine hand of the development and can grasp to put the object in the space, act vivid and diverse, the commutability artificial carries on the task in the area of the heat and danger, and at any time change the related parameter according to the difference of the workplace and the request of the product processes.
[版权所有:http://DOC163.com]
Key words: Programmable controller PLC ; Robot arm ; Pulse ; Stepping motor driver ; Stepping motor ; Direct current motor ; Sensor.、Limit switches location。
目 录
引言…………………………………………………………………………………1
第一章 机械手移动工件控制系统的控制要求………………………………2
一、机械手自动化控制系统的PLC实现方法中的基本原则、机械手移动工件的工作流程和工作原理……………………………………………………2
㈠ 基本元件及其内部原理…………………………………………………2 [来源:http://Doc163.com]
㈡ 机械手移动工件时的简单工作流程……………………………………………4
㈢ 机械手移动的工作原理………………………………………………………5
二、设备控制要求……………………………………………………………5
㈠ 正常运行…………………………………………………………………………5
第二章 机械手PLC控制系统的PLC资源配置………………………………6
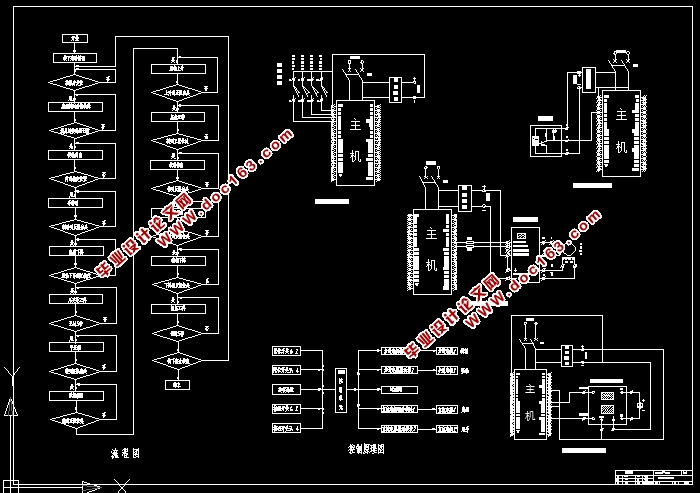
一、 控制系统构成图…………………………………………………………6
㈠ 控制系统图,如图所示……………………………………………………………6
二、I/O地址分配……………………………………………………………7
第三章 机械手PLC控制系统的程序设计和调试………………………………7
一、 LC软件功能测试…………………………………………………………8 [资料来源:http://www.doc163.com]
二、 硬件的调试………………………………………………………8
㈠ 步进电机驱动程序调试………………………………………………………………9
㈡ 两个步进电机的连动的驱动程序调试…………………………………………11
㈢ 测试电磁阀控制爪的抓、松……………………………………………………13
㈣ 两直流电机的驱动程序的调试…………………………………………………14
㈤ 复位指令的调试…………………………………………………………………16
[资料来源:www.doc163.com]
三、 程序的流程图、构成………………… …………………………………20
㈠ 流程图……………………………………………………………………………20
㈡ 程序的构成………………………………………………………………………20
第四章 机械手移动工件控制系统PLC程序……………………………………20
一、 系统的I/O资源的分配…………………………………………………20 [资料来源:https://www.doc163.com]
㈠ 数字量输入部分…………………………………………………………………20
㈡ 数字量输出部分……………………………………………………………24
㈢ 定时器部分………………………………………………………………24
㈣ 内部继电器………………………………………………………………………25
二、源程序………………………………………………………………………25 [资料来源:http://www.doc163.com]
㈠源程序梯形图………………………………………………………………………25
㈡ 源程序的指令表…………………………………………………………………29
二、 发现并存在的问题……………………………………………………33
㈠ 测试一路脉冲连续两次输出……………………………………………………33
㈡ 测试一路脉冲两次输出………………………………………………………34 [资料来源:www.doc163.com]
㈢ 采用调用子程序输出多次脉冲…………………………………………………34
㈣ 采用调用子程序输出两次次脉冲………………………………………………36
参考文献……………………………………………………………………………39
附录:FX2N系列可编程控制器简介………………………………………………39
谢辞…………………………………………………………………………………41 [版权所有:http://DOC163.com]
下一篇:热泵干燥装置电控系统设计